I am using a kakute f7 with frsky sbus receiver and yesterday when i got my first flight I noticed that when throttle works ok, but when I pitch it tries to roll, when I roll it tries to yaw and when I yaw it pitches. I am new to ardupilot but the radio calibration shows everything as it should work?
I am using Taranis and it is set to channels:
1 is roll
2 is pitch
3 is throttle
4 is yaw
So I dont understand why it wont work.
Here is my paramaters list if it helps.
params.param (18.9 KB)
RC mapping looks good. Have you tried motor test (A, B, C, D)?

Use radio calibration tab in mandatory setup tab to check your channel direction and channel output. I suggest you to finish all mandatory options before even trying to fly. Because you were supposed to encounter the issue during Radio calibration setup itself. Type RCMAP_ on full parameter list. Swap values based on what you see on radio calibration screen.
Good day, if you are using taranis just try set these parameters in the mixer page: ail… ele… thr… rud
The channels in radio calibration are set correctly but I am assuming there is something to do with motor layout.
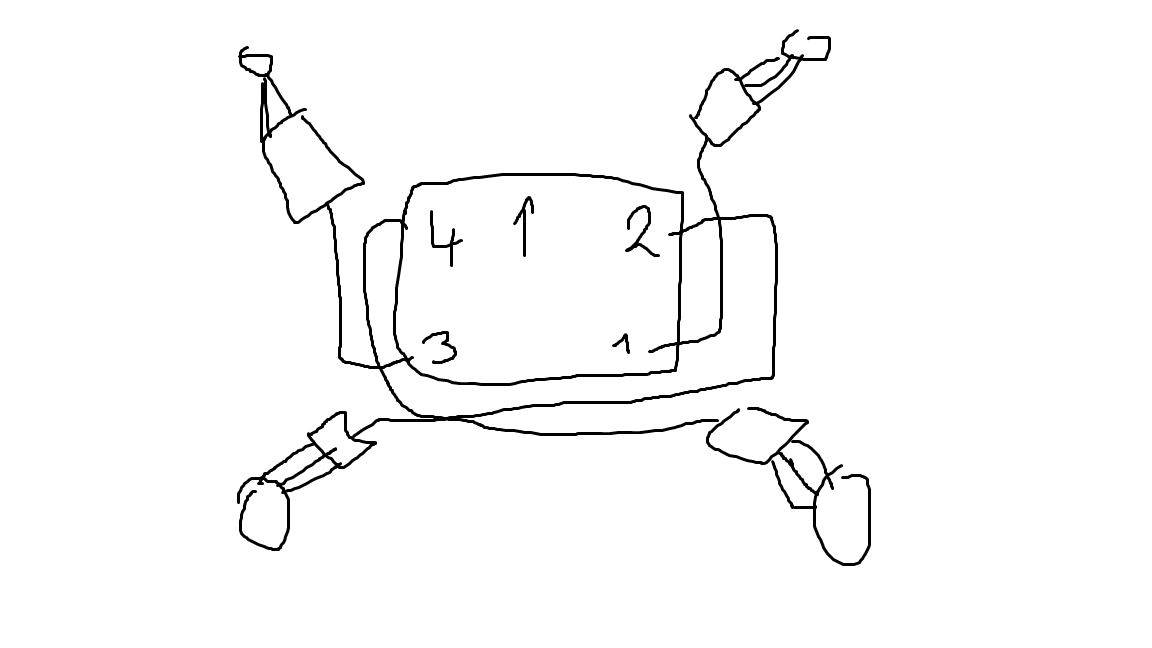
Can someone tell me how to correctly solder the motors to kakute f7 aio (like a scheme or something). I tried to solder them exactly like the layout said but that doesnt seem to be working so do i solder the esc on the arm to the closest
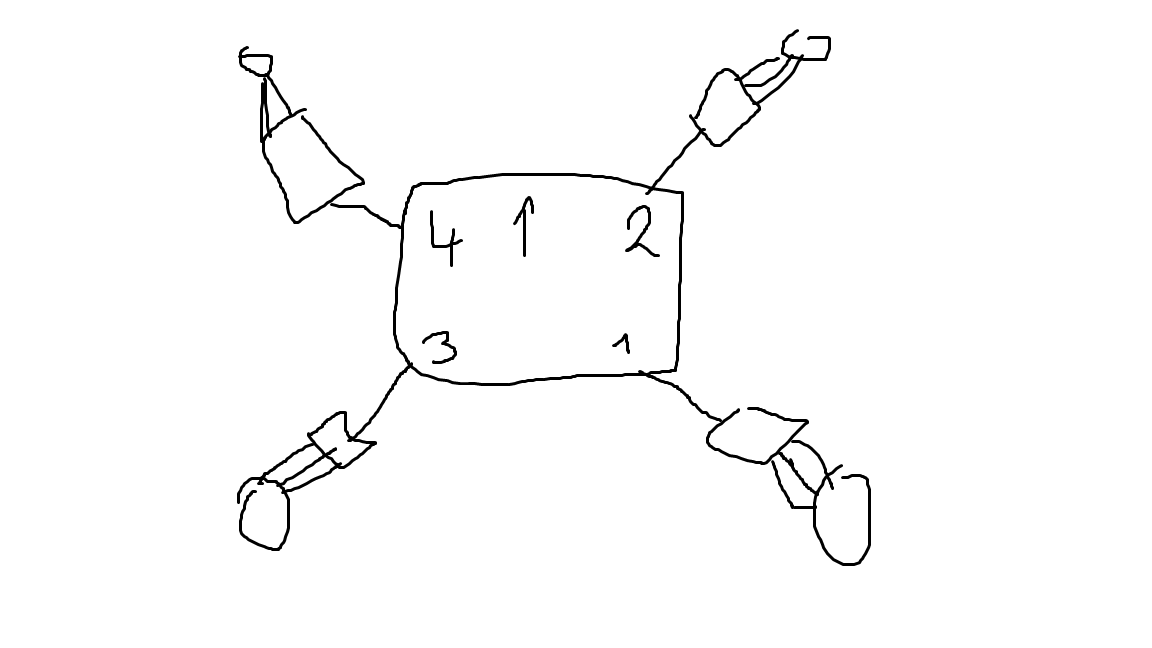
Like the first one is mine now, but does it need to be like the second one? (pardon my drawing).
1 Like
If you really did everything correct as mentioned before (rc calibration, rcmap…) then take props off and try MOTOR TEST (MP -> INITIAL SETUP -> Optional Hardware), one motor after another.
For X quad must always be:
A=M1, Motor1 = SERVO1_FUNCTION,33 = Front right (FR) = CCW
B=M4, Motor4 = SERVO4_FUNCTION,36 = Rear right (RR) = CW
C=M2, Motor2 = SERVO2_FUNCTION,34 = Rear left (RL) = CCW
D=M3, Motor3 = SERVO3_FUNCTION,35 = Front left (FL) = CW
You will quickly see which motor/ESC is where.
Than just swap signal wires from ESCs to Kakute outputs to the correct ones.
Look here:
http://ardupilot.org/copter/docs/connect-escs-and-motors.html#checking-the-motor-numbering-with-the-mission-planner-motor-test
Ok yeah will try that I thought the motor test goes 1 -> 2 -> 3 -> 4
Run the Motor Test and re-order as required. This is a common occurrence with some of these boards depending on how they are oriented in the craft.It’s rather straight forward. Make sure the board orientation is set correctly by viewing the HUD in Mission Planner then run Motor Test and re-order as required.
I have the same board and the motors 1, 2, 3 and 4 are not correctly marked on Kakute when using ArduRover. 5 and 6 are correct though. @Tilen_Kelc
Figure out what the pins really are 1-4 and then swop the signal wires accordingly. Worked for me.
It now works the motor layout was incorrect.
For any future person likes to connect
this is the mapping:
MARKING ON BOARD# = ARDU OUTPUT#
M1 = 4
M2 = 1
M3 = 2
M4 = 3
at least to my finding.
best
k