Try doing a yaw D tune and then setting ATC_ACCEL_Y_MAX to 3x what autotune gives you
Hey @andyp1per I would love some assistance fine tuning and getting bidirectional DSHOT working on our 10in fpv drones.
Are you or anyone available for hire for some consultation help?
Thanks!
Share with us whatever it is that’s happening.
I offered my services but so far no response
ha! i was referring to @LIGHTCRAFT.
Hello.
I want to ask for help. I assembled a quadcopter:
Frame-iFlight XL10V5
FC-Matek H743-SLIM-V3
ESC – Tekko32 F4 Metal 4in1 65A ESC
Motors – iFlight XING X2814 880KV
Props - HQPROP 10X5X3
I did the pre-settings, set the hover throttle, turned on the bi-directional dshot, flew a bit. The quadcopter flies well even on standard PIDs.
Then I decided to make a filtering setup. I turned on the logs, hung around a bit, determined the frequency at which the filtering needs to be set (72 hz), turned on mode 3 (INS_HNTCH_MODE = 3), made the settings according to the instructions. After the settings, I decided to check the quadcopter. As soon as it begins to take off from the ground, it begins to vibrate very strongly. I turn off the filtering - the vibrations disappear. After that, I try to try mode 4 (INS_HNTCH_MODE = 4) - strong vibrations also begin immediately after takeoff.
Here is my log before filters are enabled - DropMeFiles – free one-click file sharing service
Here is my log after enabling filters - DropMeFiles – free one-click file sharing service
Friends, help to understand what the problem is and solve it.
Thanks in advance to everyone for any advice.
I suspect this is phase lag oscillation. Its common when switching from an unfiltered build to a filtered build with notch-per-motor. I recommend you reduce all your pids by 25% and then again until it goes away and then run autotune
Thank you for your quick response.
I did an autotune, many values decreased, but the problem was not solved.
I also noticed a special feature - when I performed autotune_axes - 8 (yaw_d), this autotune also ends with vibrations.
Tell me, please, which pid values should I reduce?
Try lowering the notch bandwidth to f/4
I set the value to 16 - it did not help.
I could not access your logs
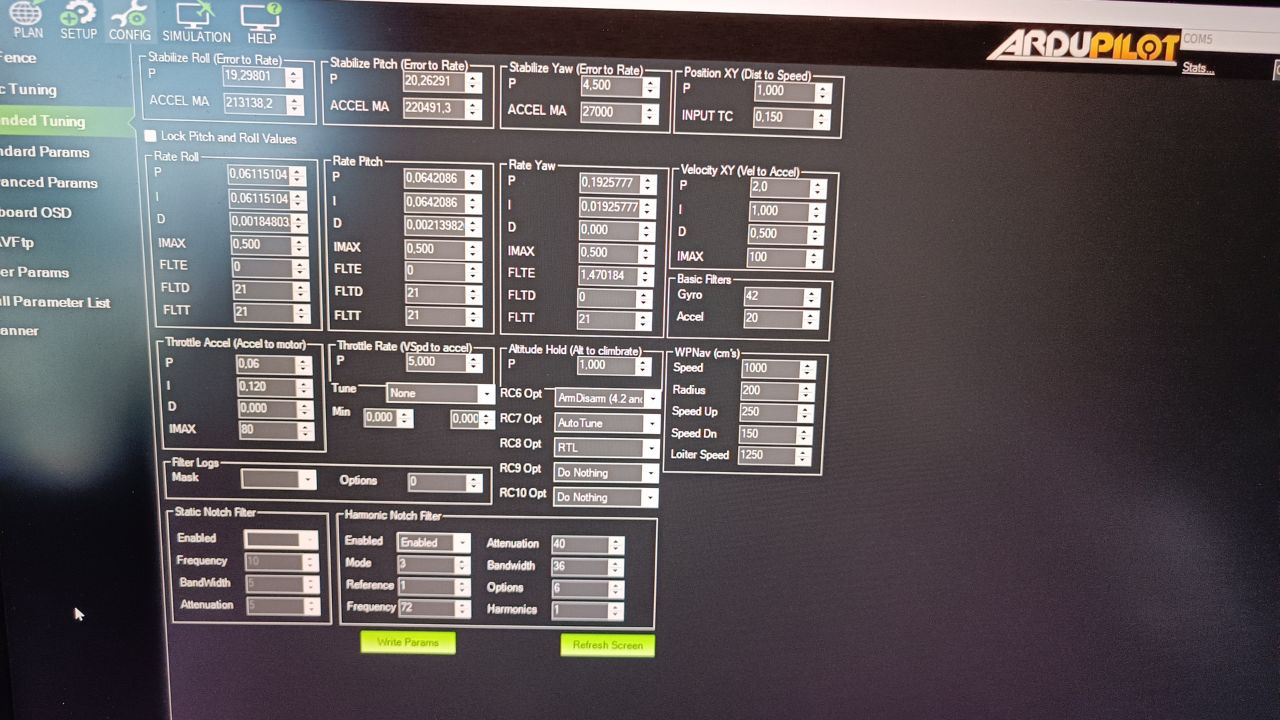
Your notch is working and cutting out the noise, but your freq setting of 72 is stopping it go lower and the motors are unbalanced. Try 40/10 for instance. Since the noise is good you should substantially raise your filters e.g. to 80/40 (gyro to FLTD) that will help a lot with the phase lag.
Thank you.
I will try tomorrow and give you information about success.
“Since the noise is good you should substantially raise your filters e.g. to 80/40 (gyro to FLTD) that will help a lot with the phase lag.”
Tell me, please, what filters i must to set to 80/40?
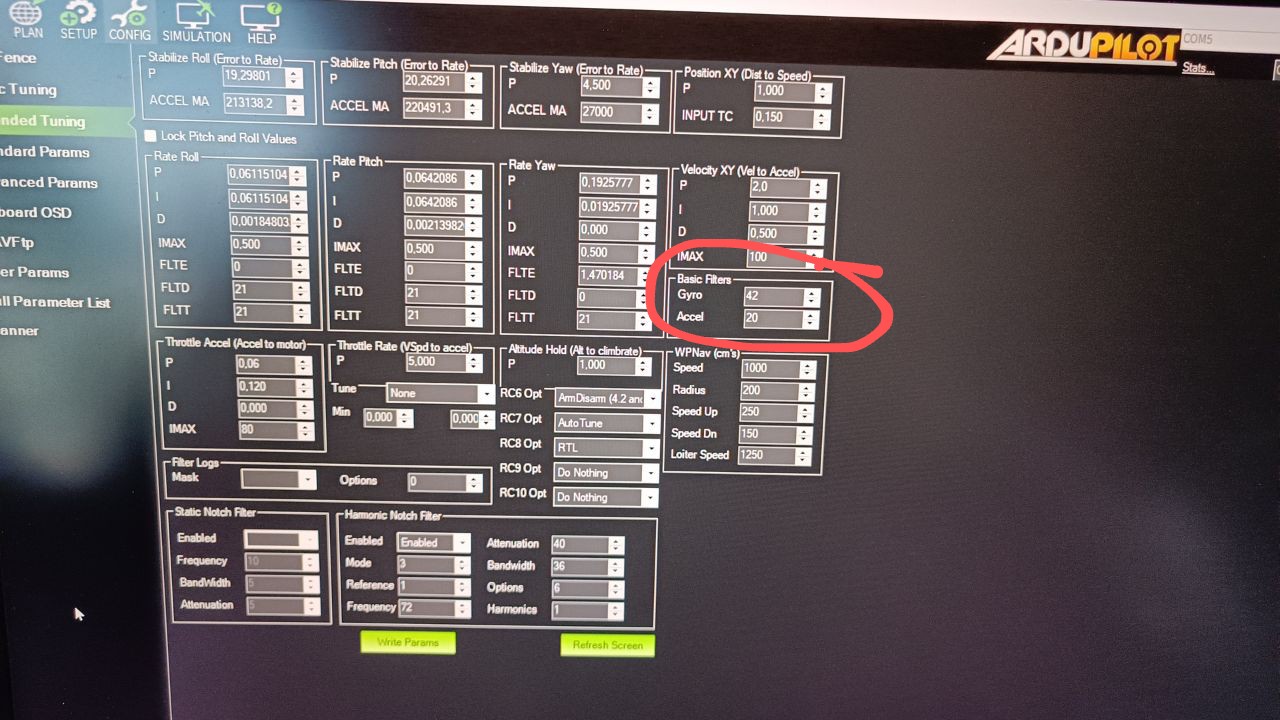
Like this:
INS_GYRO_FILTER = 80
ATC_RAT_RLL_FLTD = 40
ATC_RAT_PIT_FLTD = 40
ATC_RAT_YAW_FLTD = 40
Ok, thank you!
I’ll try tomorrow.
Hi @andyp1per ,
Thanks for the great blog.
Does the applying point of the vibration speaker affect the result of measured frequencies? Sorry but I can’t clearly see how you set up this experiment in the video. Do you mind explain this again?
Moreover, can I have your advice to measure a resonance frequency of the bigger frame, i.e 16-inch from 32-inch.
Thanks.
You are better off trying to do this in flight. If you have a decent harmonic notch setup then the remaining resonant frequency should be fairly evident. The problem with the speaker approach is that the mass and coupling are not the same as flying. If you do want to do the speaker approach then do it with the battery attached.
In flight you can usually hear it - if you throttle up and down around hover you will often get this ringing sound.