Hello I have a cube black on a small quadcopter that I have fully configured to fly but I keep getting a message that isn’t allowing the copter to arm. I have done the recommended changes as the service bulletin suggested, have latest mission planner installed, run 3.6.8 cube black ardupilot and set the parameters according to the post.
I am running the gps through the GPS1 port so that the safety switch and everything else still functions properly.
I have already reseated the cable connection from the inside the gps and on the carrier board.
And the small switch has been toggled and made sure to be set to I2C. I was wondering if anyone else has run into this issue and any guidance on how to fix it.
Thank you.
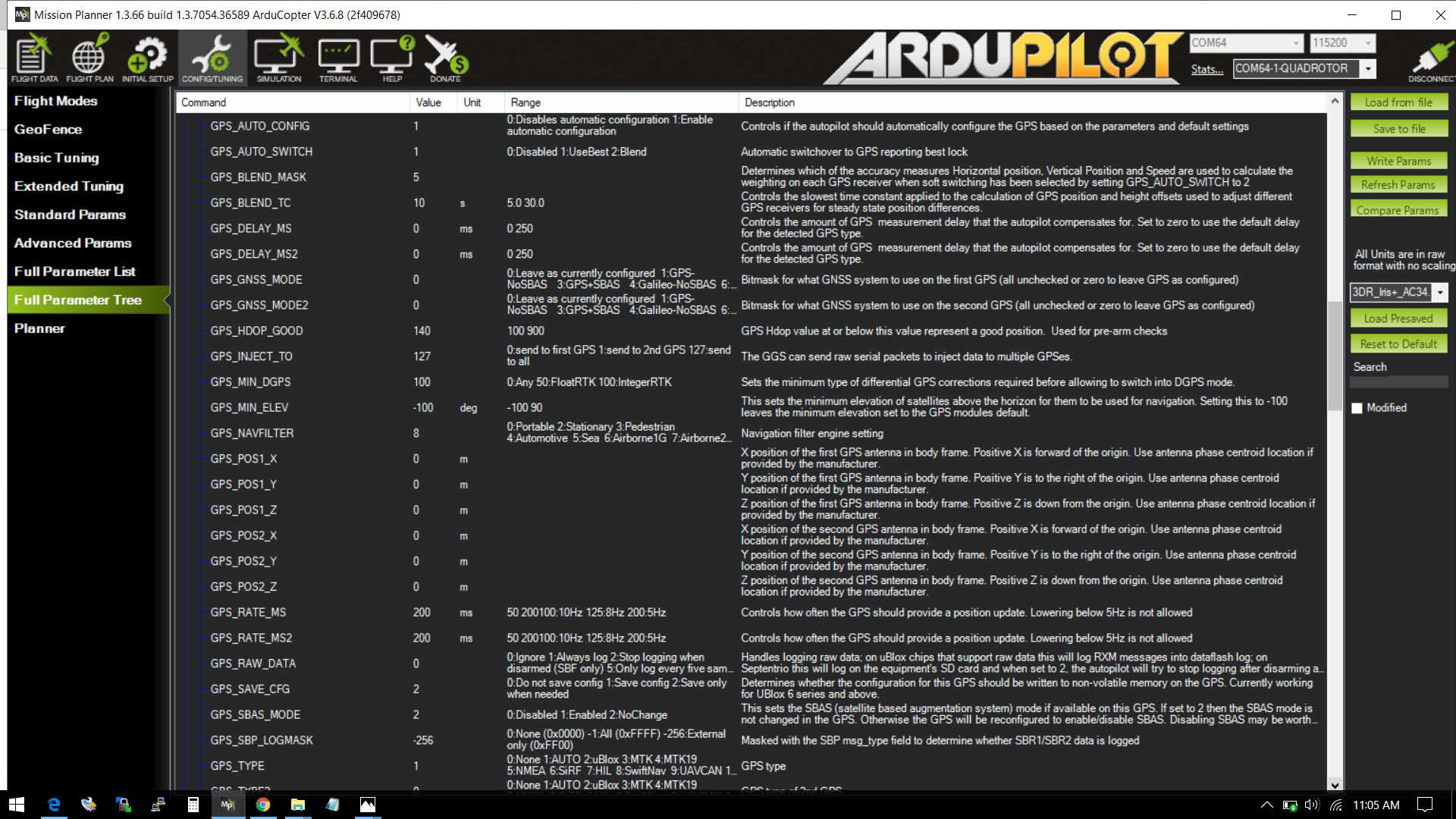
I haven’t had to configure the GPS port or type before. How should it be configured? Whenever I make a drone since I make quite a bit that are very similar I just use a standard set of parameters.
It is the Here2 gps, I only used proficnc pixhawk 2 cube autopilots. The ones I recently got were Cube blacks though. I also want to point out that I use mission planner to configure the drones, and It was my understanding that the gps was self configured.
I have swapped the HERE2 gps out and installed an old HERE gps and did a compass calibration and the drone flew well. But I need to figure out why the HERE2’s aren’t working…
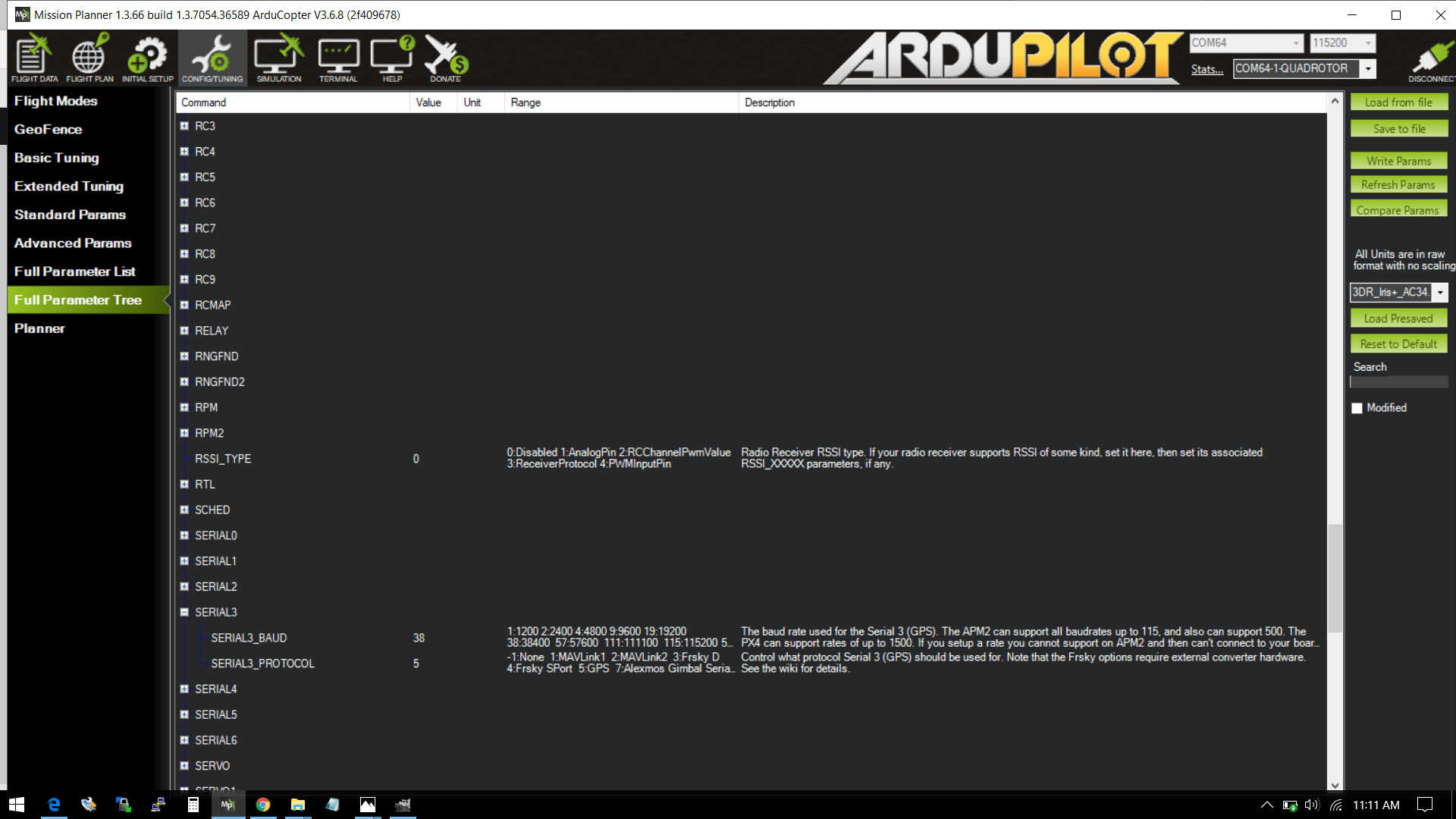
I have very similar issue with my cube running Copter 3.6.8, where i am getting GPS1 failing Config Checks consistently, but the catch here is that i have not connected any GPS in the GPS 1 port instead i am using ZED F9P based module in the GPS 2 port. My sat count is 32 and i am having good 3D fix, however this error keeps popping up when trying to arm in loiter. I have configured the ports correctly and i even disabled the Serial 3 Port as i am using Serial 4 (GPS 2). I could easily disable pre-arm checks for GPS and call it a day but i really want to know what is happening here and do not intend to take the risk with my large octocopter. I haven’t tested the latest beta FW yet
I think there may be some problems in disabling the serial 3 gps. As i understand there is a little bug in the system that always thinks the gps should be on port serial 3, even if it is not. But i guess some of the devs could explain it better.
@Jose_Ortiz Have you had any luck finding the issue with the HERE2’s?
I’m the same symptoms with a similar setup:
Have confirmed that switching back to a HERE removes the PreArm issue.
I have two HERE2’s that both give ‘PreArm: GPS1 failing configuration checks’.
I have a 2nd GPS installed, a HERE2 in CAN mode plugged into CAN2.
I also have two other identical aircraft with 2 x HERE2 modules which DO NOT have the PreArm issue. I think those HERE2’s were purchased in a different order to the two which are not working.
I can replicate the PreArm issue on the bench with just a spare cube black powered over USB with nothing but the suspect HERE2’s attached to the GPS1 port.
I suspect that the problem modules I have contain different software to the previous HERE2’s I used, but I’m not sure how to go about debugging that.
If you look at the release notes 3.6.8 fixed the ekf issues. In this link you can see the changes that were made in 3.6.9, and i dont see any changes reffering to EKF stuff. Copter-3.6.9 Released!