I have been scrolling through this log https://plot.dron.ee/3QCV trying to figure out why 3 minutes into the flight the Hexa started acting as if it went on an agreesive roll autotune for 3-5 seconds and then recovered.
Also it can be seen that the Curr spiked at 250amps per battery (500amps total). This Hexa uses 2 with seperate power modules and 500amps is already 300amps more than the maximum power of motors, modules and for sure above possible battery power.
I can see Mag offsets being high but have not been able to track anything that justifies either roll of AMPS.
Any ideas?
@mboland
Thank you for your reply.
Yes this copter has it’s modules tuned at a constant 50amps and it would hover around 25-30. It had done so on all previous 30+ flights. It has run about 4 times autotune when first build at 0.05 and each axis separately always with 100% charged battery. It’s powerful and at this flight was missing a kilo of payload. Also did another small test flight after this incident and curr was proper as also performance. With the missing payload the p was slightly elevated but it was to be expected. There was the ground station turned on and at the mentioned of issue my cell phone ring and for as long as it was ringing (3-5 sec) this was happening. Chance? Maybe! Effected the GCS from the phone? Maybe! That’s why I am scratching my head. Also it was the first flight that autoanalysis shows compass as failing.
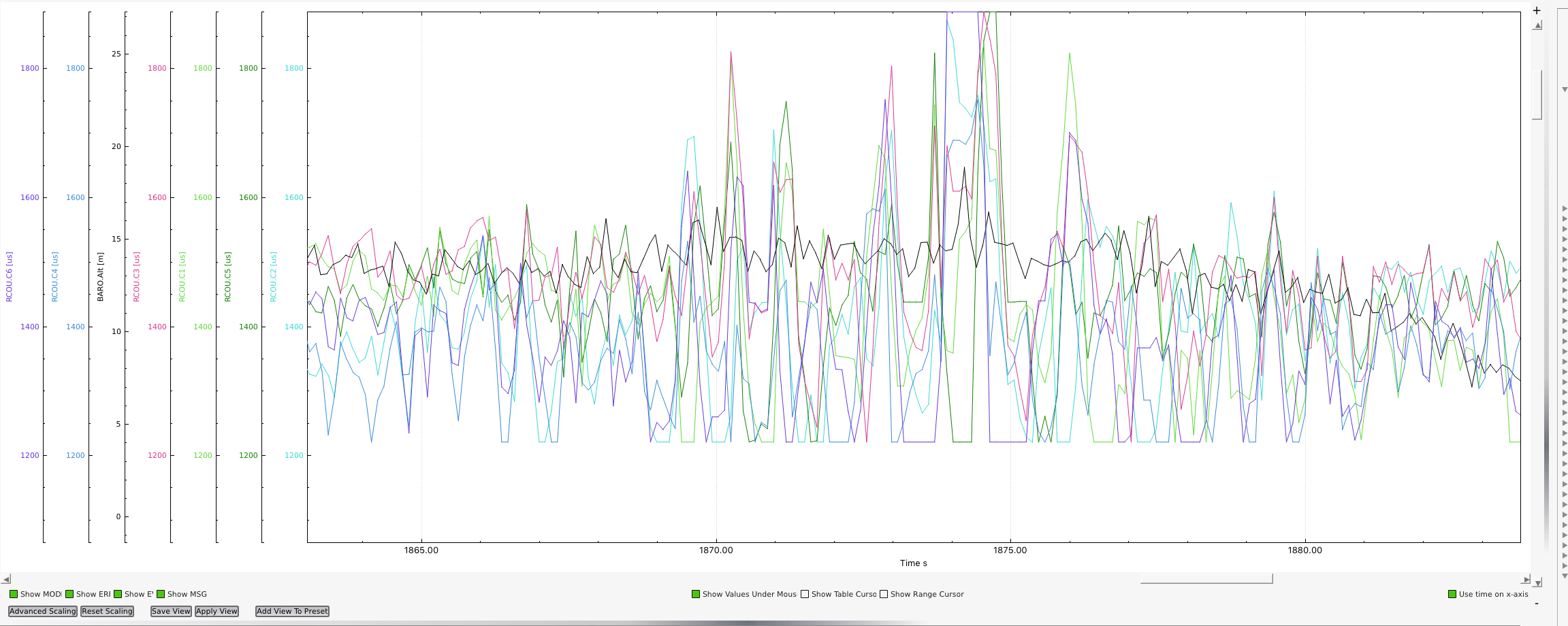
Can you see Stick inputs that cause the oscillation? because at the moment i was hardly holding the radio and seeing stick input makes it strange. The only thing that happened was that my phone rang and i was about 2-3m away from the GCS
Combined with being 1kg lighter than tuned and having so much power in reserve, when unsettled it had to fight by shutting motors down to maintain stability.