Probably not the Herelink as I am using the same from time to time. Your RC_MAP is suspicious and I don’t know if you are using a safety switch that is indicated in the parameters and arming the system first. Also have you calibrated your remote? Some RC settings look like it but RC3 does not.
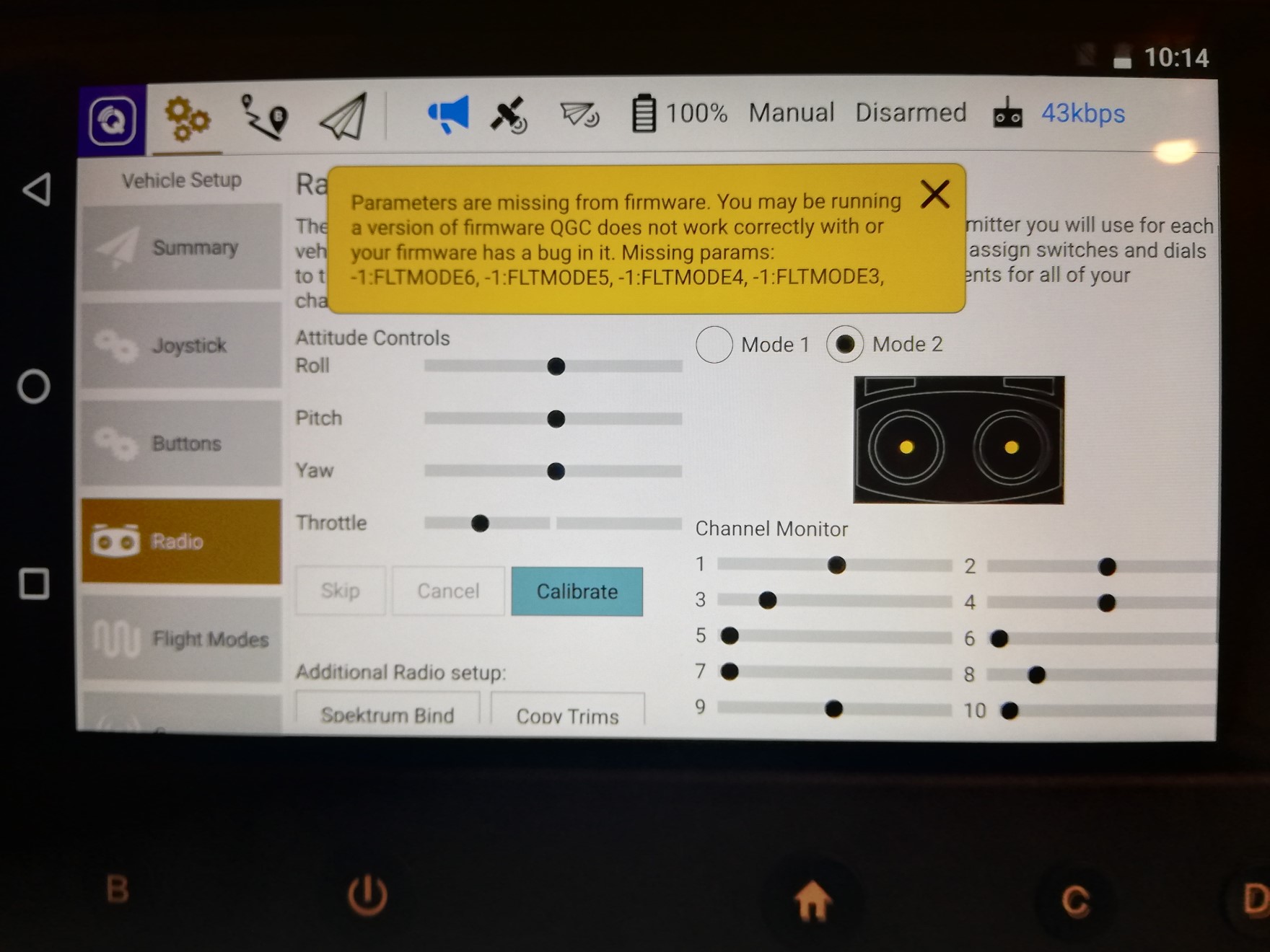
In the Radio menu, throttle keeps in that position. When I push forward in increases but when I press backward it also increases.
Channel monitor from 9 to 16 are blinking
There’s also a problem with the flight mode parameters as you can see on the pop-up message.
When I did the radio calibration freezes in one of the steps.
That’s all I noticed that could be irregular.
Just close the yellow box. I’m using mine this morning and I will recheck my radio screen. I currently only use the roll and pitch stick for throttle and steering.
You have BRD_SAFETYENABLE set to 1. Set this to 0 if you do not have some type of safety switch to engage. And you will have to arm the system before the motors will run
Thruster on left Y axis and direction on right X axis. (mode 2)
If I change this into mode 3 on joystick options, thrusters spins on neutral sticks position
It appears that your left stick, RC3, is not calibrating properly. Look around on cubepilot.org. I saw something a bit ago on some problem and how to solve it.
I am having a similar problem. I am running ArduRover on a boat. It was working until I added my new Herelink. I had trouble with the radio and the joystick calibration so I used the method in the Google Doc to get into the calibration through the dial pad. After that I was able to calibrate the joystick and the radio, but now I either get no response from my thrusters or they start spinning wildly. I have checked and rechecked my parameters but I can’t find the problem. I tried to attach the parameter file but it says a .params file is not authorized. Any ideas?