So I’ve been reading on these forums (here and DIYDrones) and have found a lot of cool knowledge and info, its helped answer some questions and spur some creativity! Now, I am trying to get into building arduboats for bathymetry and/or water quality analysis and want to share a design and setup in case it may help someone else with their projects, and to gain any input anyone may want to share.


I am calling this one the HarborMaster or perhaps HarborScan. I don’t know for sure yet. It one of 4 designs and my favorite – this one is 6ft long, made of 0.08 5052 Tig Welded Aluminum, is powered by a 30lb thrust trolling motor and dimension engineering Syren controller – of course with Pixhawk with ArduRover firmware.
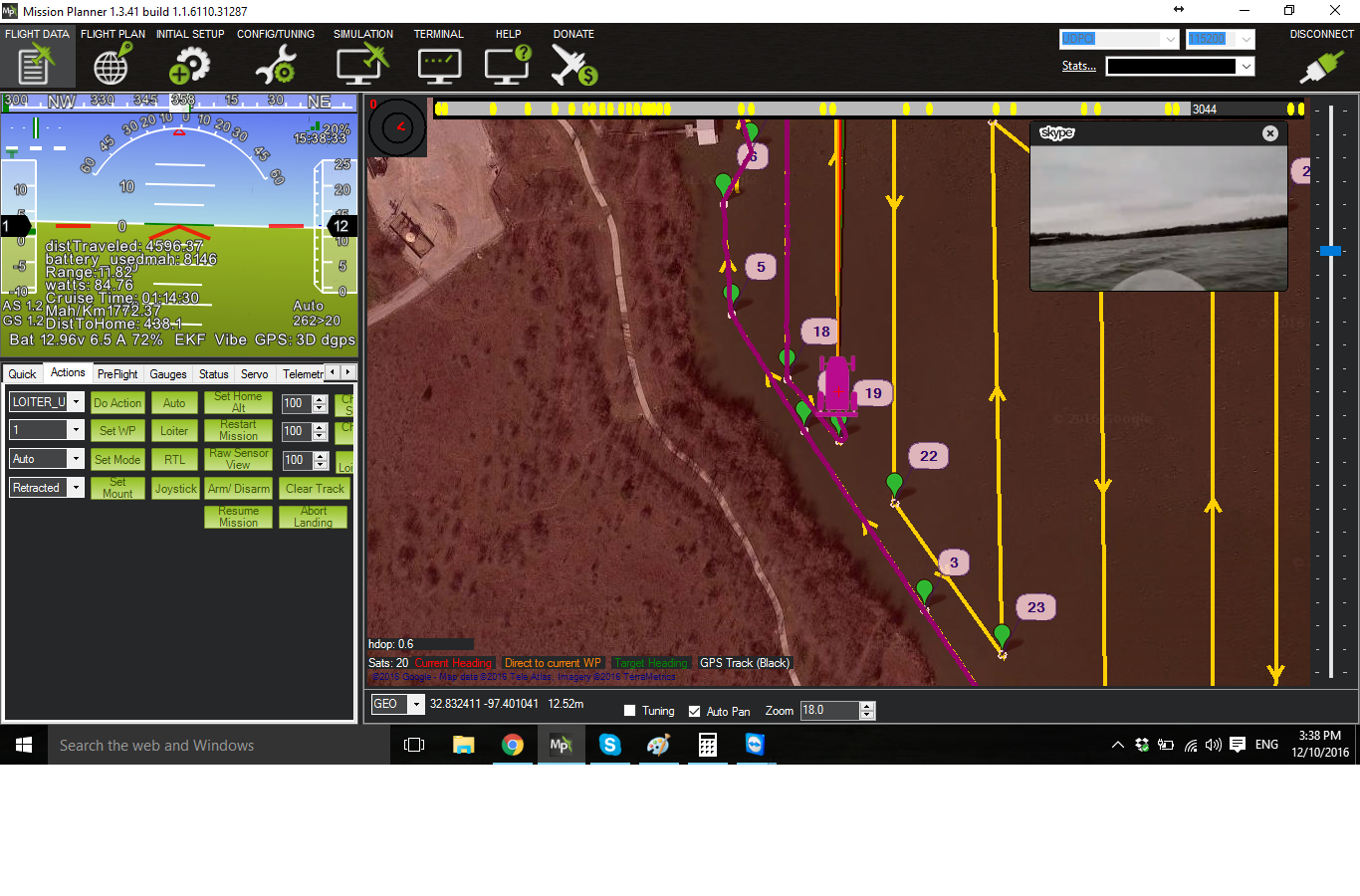
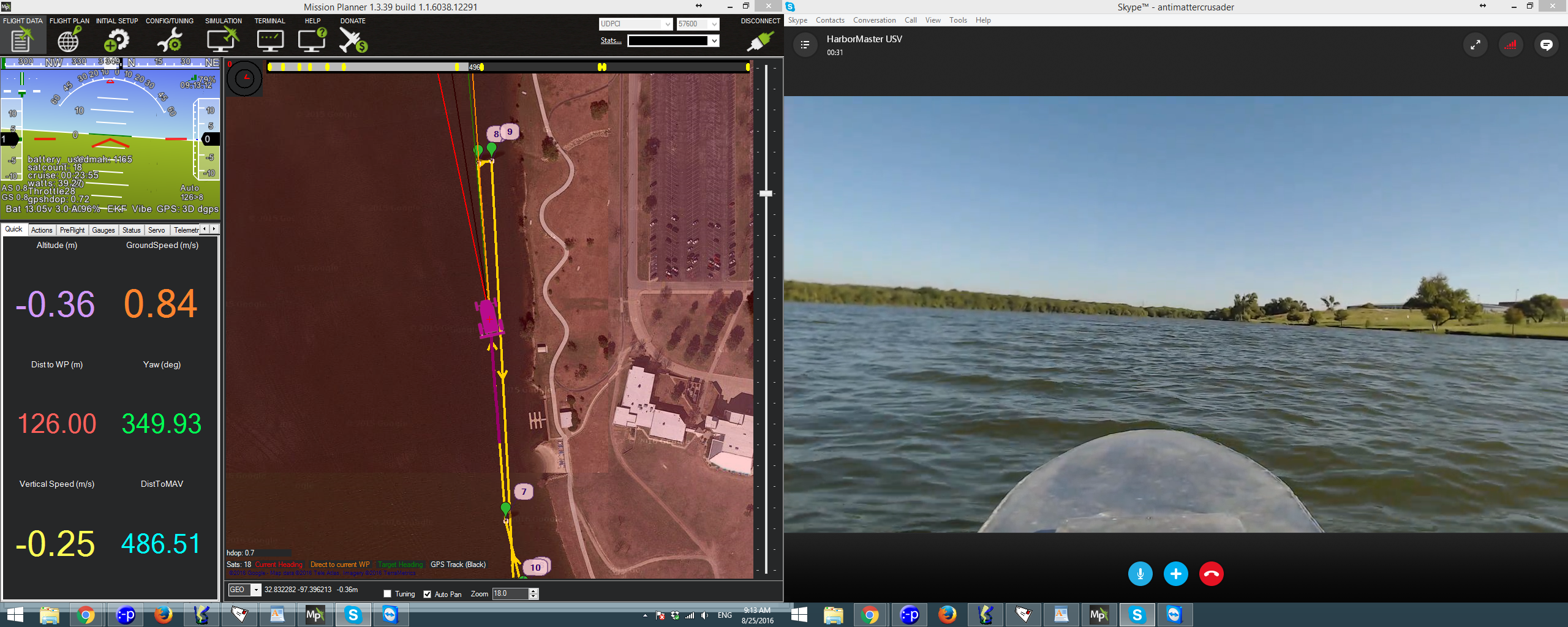
The telemetry is a 500mw 900mhz link, paired to an on board Windows 10 SOC. The USB side of the telemetry can be plugged into base station laptop for traditional RF-Mission Planner control, or plugged into the SOC which works work with a hotspot and Amazon EC2 instance to relay the signal over cellular. The boat also runs Skype and has a Logitech C920 camera in a 3D printed housing, so in areas with good LTE, very high quality video is possible. When operating with a remote from the video feed, the lag is surprisingly minimal, maybe around 200-400ms.
The design is deep/tall with a lot of freeboard, primarily because I wanted to have the option of installing a tall Group 29D 120ah lead acid battery for longer missions, which provides >20hr endurance. That’s a pain to carry though, so typically I use a 40ah 4S LiFeP04 battery which gets around 10hrs.
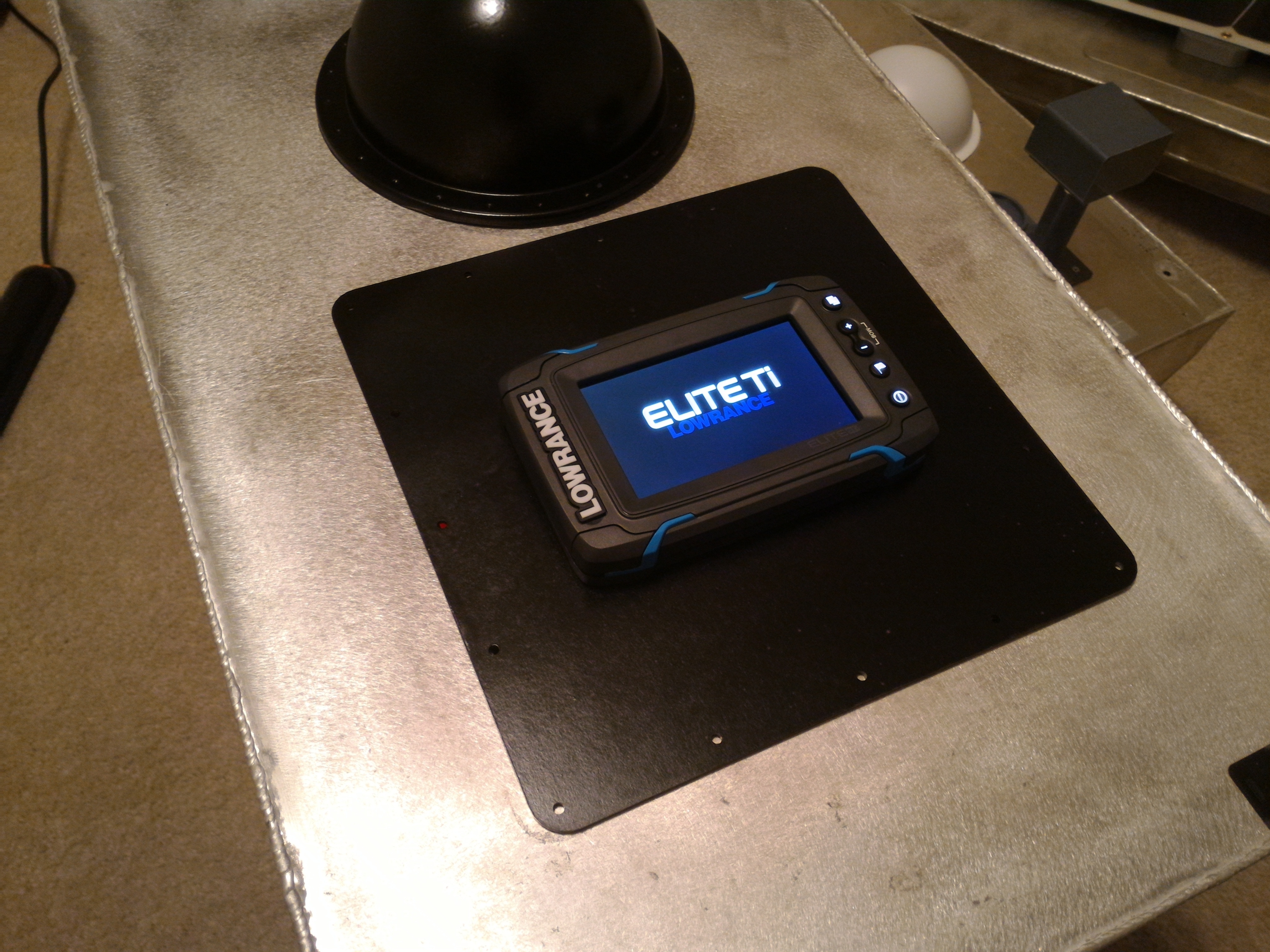
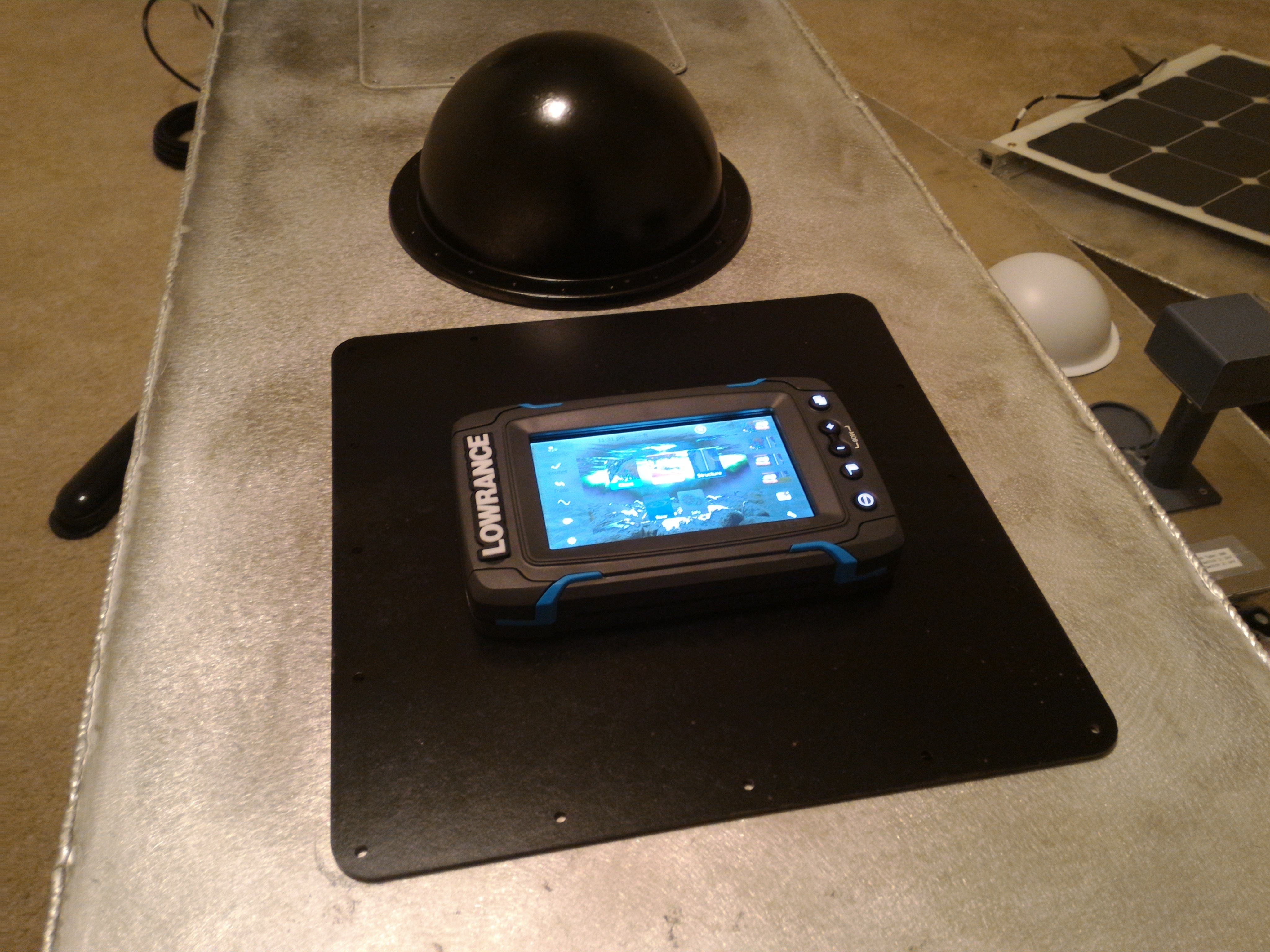
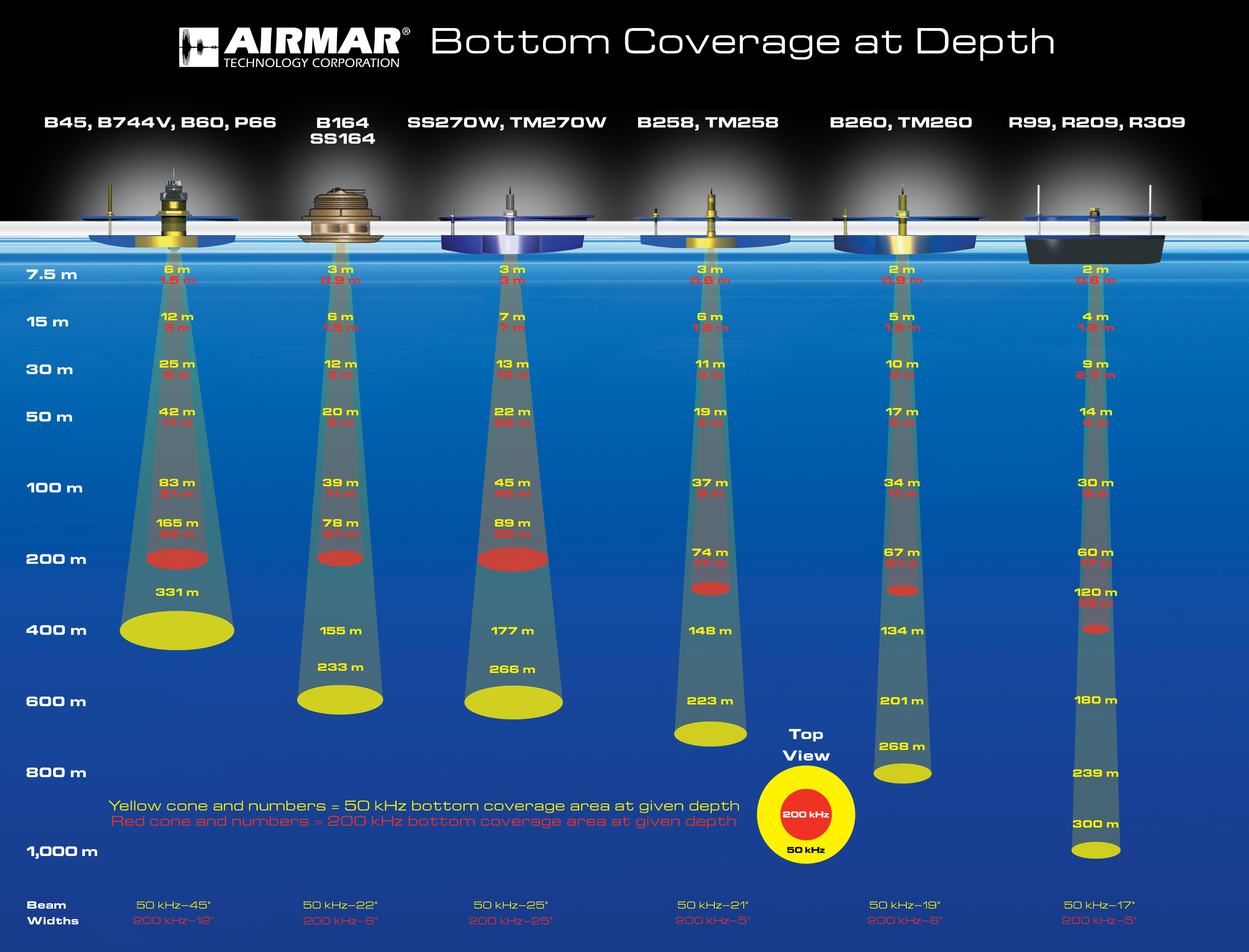
I’ve installed a Lowrance sonar unit and may also add water quality sensors such as dissolved oxygen, ph, conductivity and temperature but this is a new area to me, have some learning to do.
I’ve also installed a 750gph bildge pump just in case there are any issues… it just hit 250 hours on the clock last weekend, so far so good, no breakdowns - though I did run the battery dead once and one time getting stuck in a thick patch of seaweed.

Anyway, if anyone has any suggestions, or has any questions on the setup, wants to bounce ideas around – post here! Happy to share and learn.
Here are some pics of other designs, which is not as well tested yet, but so far seem to perform well!




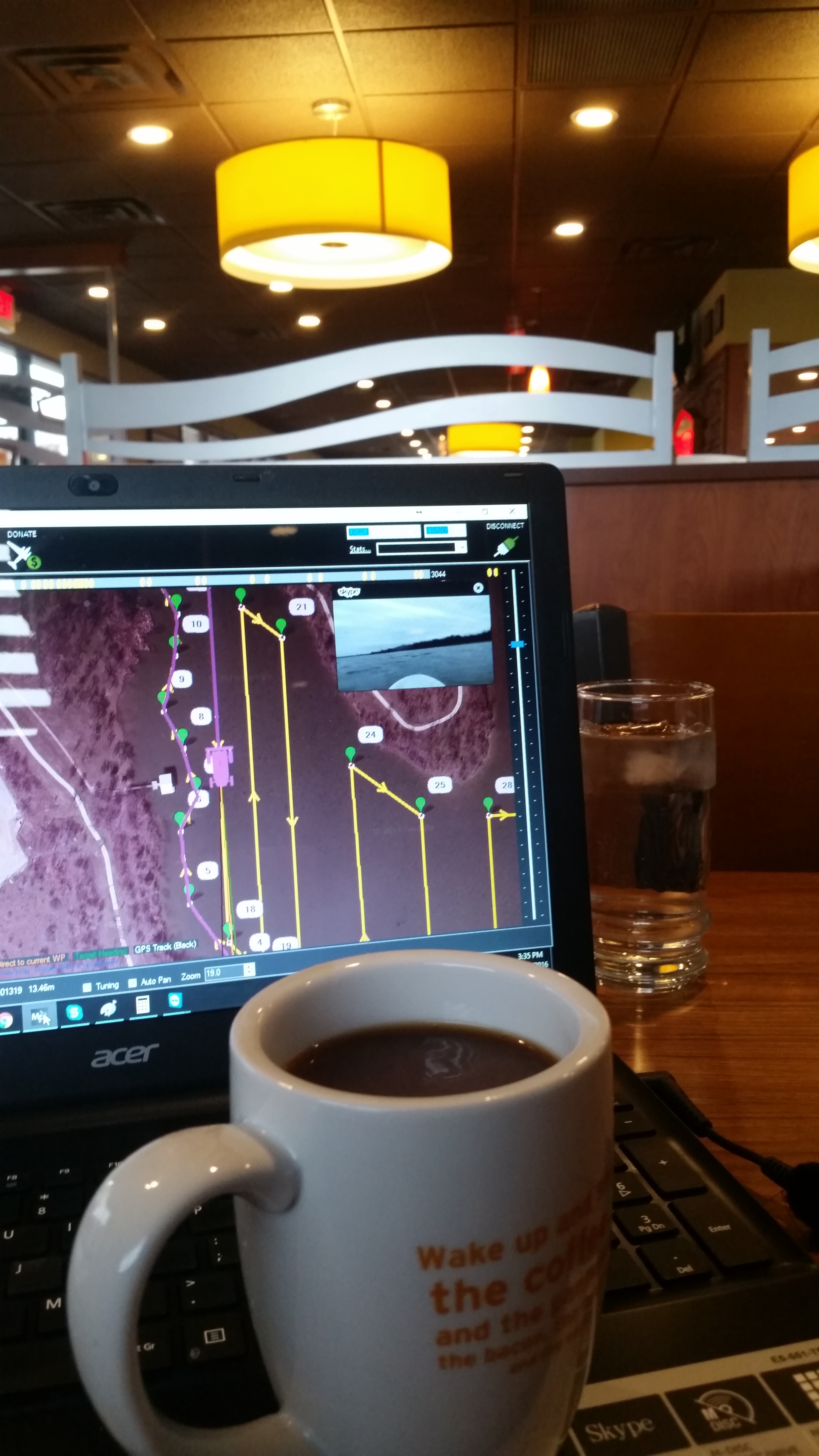
 But in reality, conditions on the lake were rough, about 35-45 degrees, 15-25mph winds and waves which came over the top of the bow – with occasional whitecaps - which caused quite a bit of pitch and roll action. The data appears to be skewed accordingly. I covered the majority of Marine Creek reservoir (near Lake Worth, TX) in around 3-4hrs.
But in reality, conditions on the lake were rough, about 35-45 degrees, 15-25mph winds and waves which came over the top of the bow – with occasional whitecaps - which caused quite a bit of pitch and roll action. The data appears to be skewed accordingly. I covered the majority of Marine Creek reservoir (near Lake Worth, TX) in around 3-4hrs.