I am loving this, what is your setup and code to get the boat to go to a waypoint? I am looking to do the same to have a boat follow gps waypoints. and the output would be to correct the rudder position.
Thanks for the post.
As I am just starting this project don’t have much to show yet.
@antimattercrusader Here’s another option for streaming NMEA 0183 data: http://kingtidesailing.blogspot.com.es/2016/04/make-wireless-nmea-0183-multiplexer.html
It runs on a RPi3 as well.
Hi All,
I know this thread is a little old, but curious if there are any updates?
I am planning to start building a boat for lake/stream/river mapping as well. Mostly for streams and rivers.
Currently, I’m researching depth transducers and looking to use a Raspberry Pi3 for data logging.
@Michelle I’m curious about why you are going with a $3k transducer over a $150 version? The only advantage I see in your sensor is the update rate? Not sure how fast you are planning to have your boat move when mapping?
The hydrographic EchoLogger works very well. The reason to use it is the relatively narrow beamwidth and it’s really compact. Couple it with RTK and transmit via wireless to shore and you have a great acquisition system and real-time onshore visual QC of the result.
Hi all,
Anybody knows how do carplounge managed to make wireless bridge between the transducer and head unit?
I’m planning to make it for a Lowrance HOOK-4x, but I cant find any information from this setup.
Thanks for all help
Seafloor Systems offers low cost but very accurate single and multibeam systems specifically geared towards USV applications. www.seafloorsystems.com. Their new PicoMB is an extremely small but powerful multibeam echosounder, while the Sonarmite is compact, Bluetooth enabled, and battery powered.
John
The Seafloor Systems Sonarmite and SonarM8 is under $5,000 USD.
John
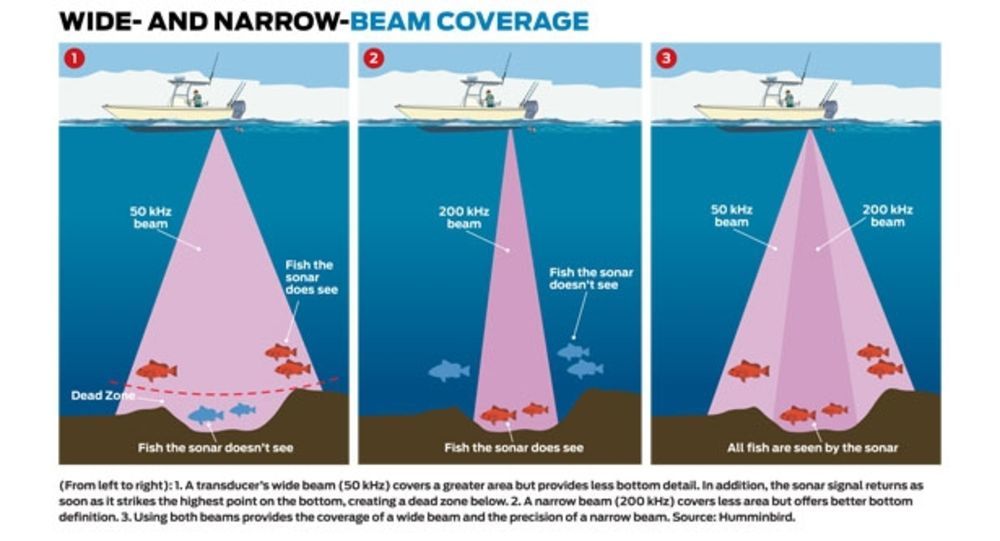
The $3,000 echosounder has a narrower beam pattern (<9-degrees vs. >24-deg.) or footprint on the Seafloor giving you more accuracy. Compare it to shining a flashlight on the seafloor. The bottom is detected at the shallowest point within that footprint on the seafloor.
John
I’m not sure which systems you are referencing with the <9-deg vs. >24-deg, but many of the Humminbird models have <9-deg cone angle for much less than $3k. I think there is a big change coming in sonar sensors along with other sensors. Most of this is thanks to low cost unmanned vehicles.
The echosounder’s you are referencing are only 200Khz. These don’t seem very ideal for small river/lake/stream mapping. I would think 455Khz at a minimum.
Also, your comment about the “The bottom is detected at the shallowest point within that footprint on the seafloor.” is incorrect. Sonar does not detect the shallowest point within a beam footprint (see simple picture below).
Hey Kevin, sorry I’ve been MIA lately. Work got crazy busy. Ended up doing some overseas stuff as well.
Anyway, though you might like this new boat design. For day to day use, this is fast becoming my favorite. It’s extremely easy to carry and very stable, gets good results.



Nice boat! Any closer pics? Looks great.
@antimattercrusader Looks great! I’d be interested to see whatever maps you may have produced with your trial runs. Also Reefmaster 2.0 came out so some interesting features there.
Hey, sure - here you go:
https://drive.google.com/open?id=0B2JMrehJ4ckEcVo2M2Jha2J6Q2c
You can also download the raw sonar log here:
https://drive.google.com/open?id=0B2JMrehJ4ckEUHRMRENOSnRqT3M
I just upgraded. Looking forward to playing with it a bit more.
Here is a video showing mission planning and tracking: https://youtu.be/R2Xrm5ieOes
Awesome! Those are some good looking maps!
Do you have a TotalScan mounted so you can start trying out the sidescan? It’s a bit of an art to get the mosaicing looking good.
Glad to hear it.
Yes, I do. The sonar file above does include sidescan.
Indeed, it’s hard to get the mosaic to look good. That is a skill I have yet to master. I see some awesome examples of what can be done in ReefMasters videos haha.
Here is the boat in its current configuration. Just put it out in some rough conditions, 30mph winds, many of the waves went over the top. It remained pretty stable but did get some water inside, probably through the head unit’s hole as I didn’t seal that - too much changing out of equipment.


Hey Kevin, do you happen to know of any sonar units (Or other solutions) which can operate in ultra-shallow conditions?
Such as recording accurate depths in as little as 3-4 inches of water?
Thanks!
The only solution I can think of for that shallow is bathymetric lidar on a UAV or other aircraft.
Hi,
I am very excited about your boat, so I decided to write you in search of your experience and help for my own project.
I have in mind the creation of a similar vessel for harbor mapping.
I would be interested in obtaining a bathymetric map, side-scan images and fpv video recording.
At the moment I have thought about:
Pixhawk controller
Dual motor (no rudders)
Go-pro Camera or similar.
Here + GNSS or similar
Lowrance HDS or similar that includes TotalScan transducer.
A single battery pack for all the devices.
I would be interested in processing all that information with the Reefmaster software, at the same time that it can be seen in Live Data, the RTK GPS on one hand and the transducer data on the other.
Is that possible? What configuration do you advise me?
Thank you very much in advance.
Pau.
PauG,
I think it should be possible to process the Reefmaster software using the DPTH message from the dataflash logs if a echo sounder (like this one) is attached to the boat. When the echo sounder is directly connected to the flight controller then we don’t store all the “back scatter” data that the echo sounder provides because most flight controllers simply can’t handle that much data.
I have applied for a Japanese government grant to improve ArduPilot/APSync to capture a greater amount of the echosounder’s data in order to produce a low-cost open source drone boat for mapping but I won’t hear back on that for another month or so.
1 Like
Rmackay9,
Thanks for your reply.
What I was thinking is to read the wifi data from the lowrance console through a virtual com Port.
I’m not sure if reefmaster could read this as Live Data.