I must be over looking something important so need some guidance. I am doing BENCH TESTING ONLY at this point.
- I am using Pixhawk 2.4.8
- I have loaded latest Ardu plane firmware.
- I can arm the plane, by first pressing the safety switch (after GPS lock) and then pushing the throttle stick to the right.
- A single motor spins fine when throttle is used.
The issue is, when I push the stick to the bottom left, PixHawk will not disarm. even if I try to disarm using the push switch, it stays solid RED.
What am I doing wrong here? Do i need to adjust some default parameter settings here?
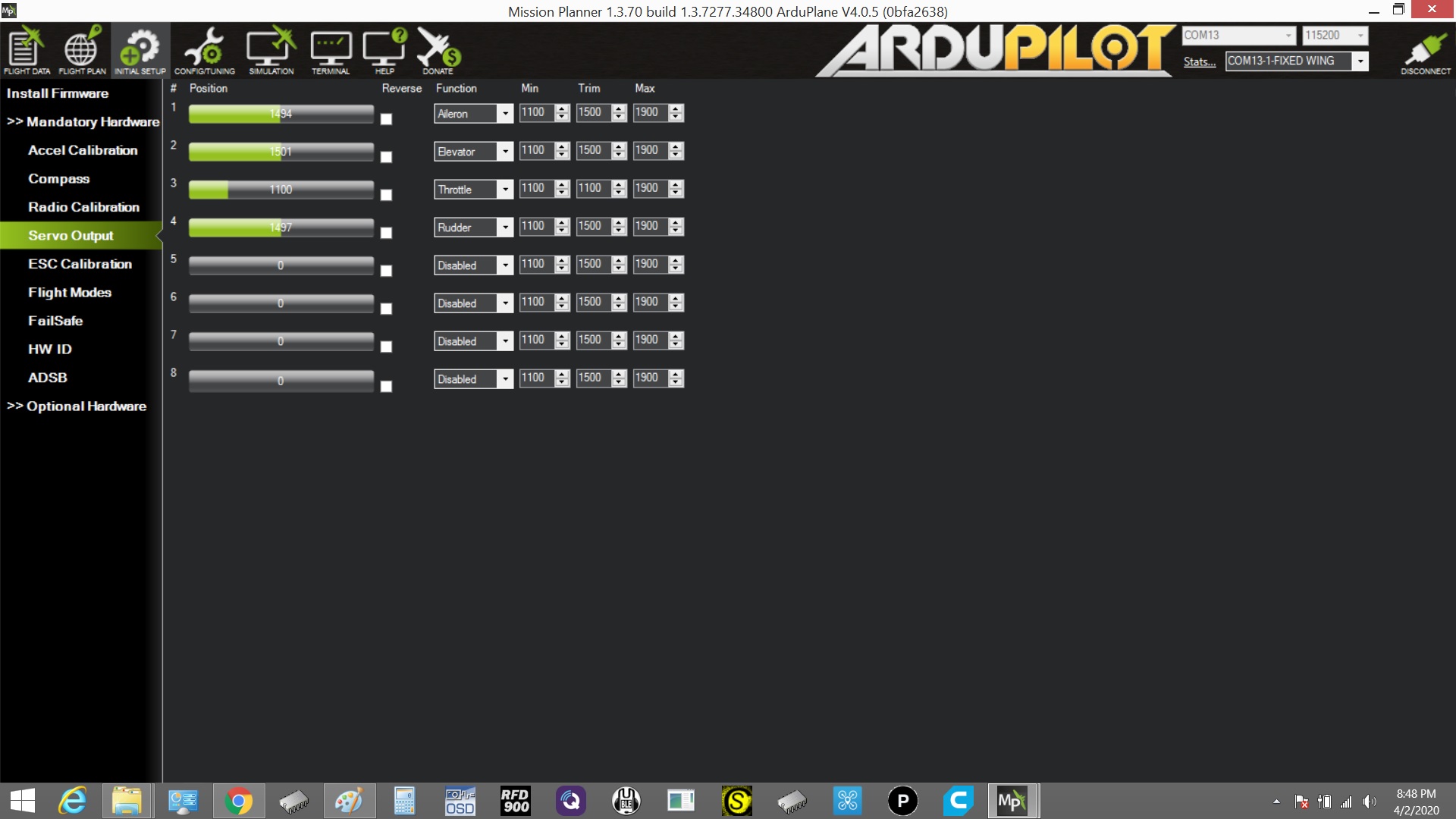
I am using very simple basic channel mapping.
TX
Chan 1 = Aileron, Chan 2 = Ele, Chan 3 = Throttle, Chan 4 = Rud.
Mission planner exactly the same. See screen shot.