However I don’t get any signal at all in mission planner radio setup page. Bars don’t react to sticks, if i disconnect the receiver cable I also don’t notice any changes.
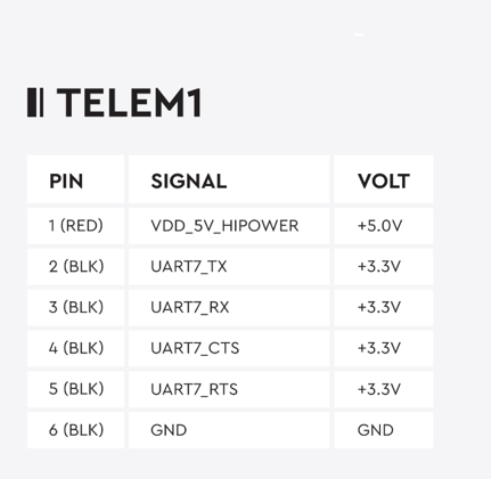
Let me know if I’m doing something wrong. Also while digging around I found out that RC/SBUS port uses UART6, it doesn’t show up in any SERIAL parameters . Is there any way i can use that?
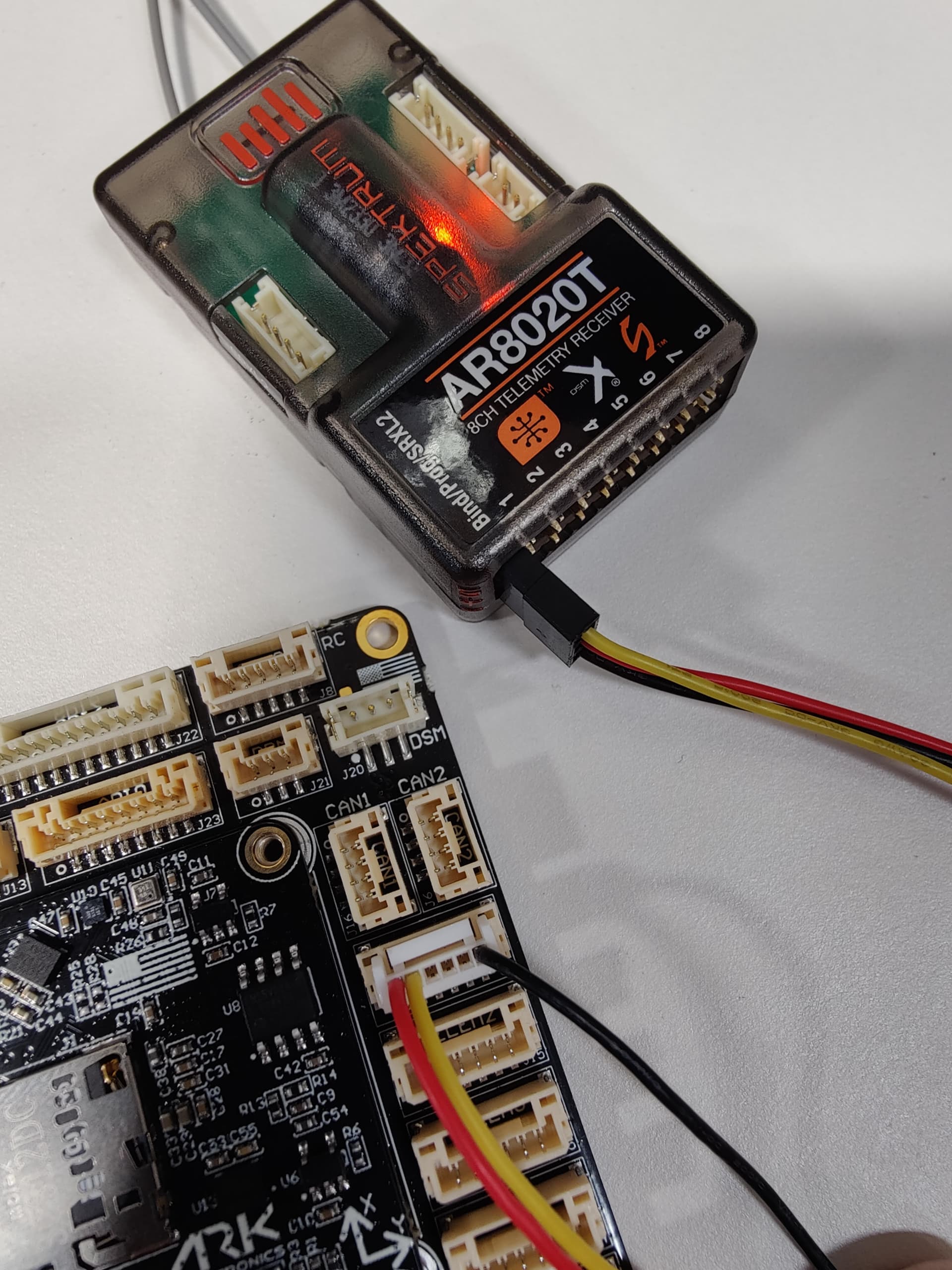
Connect the AR8020T not through the Bind/Prog/SRXL2 port but use the servo port no 1 (on the receiver).
I don’t know why is this an issue. I will update it as I play more with it.
Okay, more discoveries:
Failsafe setup with forward programming is buggy as hell.
Since I connected the autopilot to port 1, if i set up the failsafe for throttle, sometimes it stops working, I witnessed it working once though.
Most of the time the failsafe throttle setup through forward programming does not work through SXRL2 port, however it outputs the correct values to servos from the reciever. Maybe they didn’t compute the failsafe values for SXRL2, just servo outputs.
Ardupilot can detect rc is lost through the serial, I switched of the remote while armed, it said NO RC RECEIVER on mission planner HUD
This is not an ardupilot issue. Did anyone manage to setup the ardupilot failsafe with this reciever? or managed to use the Bind/Prog/SRXL2 port instead of the first one?