I have been working on a Tricopter VTOL for the AR Wing Pro.
Managed to get all the required hardware (i think) on board and within maximum takeoff weight.
Running a Matek H743 Wing FC and a Rpi zero with UavMatrix as a companion computer to provide telemetry/video back to mission planner over 4g.
Mostly just been performing hover tests over the last few weeks, and I have even flown it in FBWA mode once but the instability is making me very nervous.
Can someone help me understand if this is a mechanical design issue or tuning?
You will notice in the below video that the yaw axis oscillates noticeably, It also has a tendency to lose altitude when flying forward in Q_HOVER. The main concern is that it does not seem to be able to maintain control of its position if switched to Q_LOITER and will overshoot to the point I must regain control to avoid a crash.
Here is a link to the log file and some more pictures.
This is the log from the flight in the above posts video. Ignore the flight plan in the log - I was testing at another location and forgot to erase it.
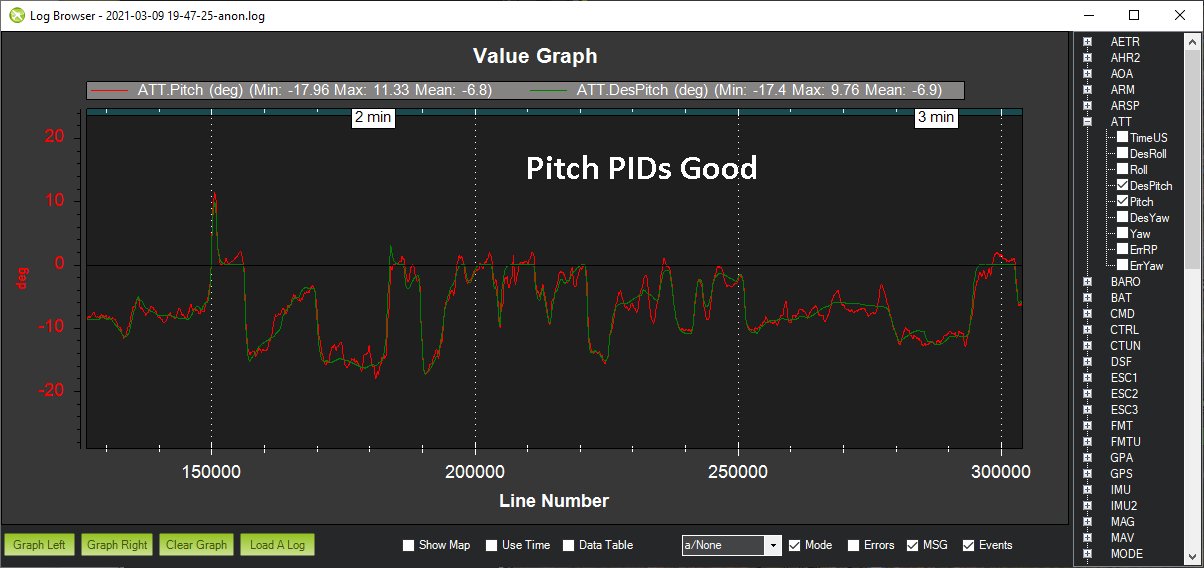
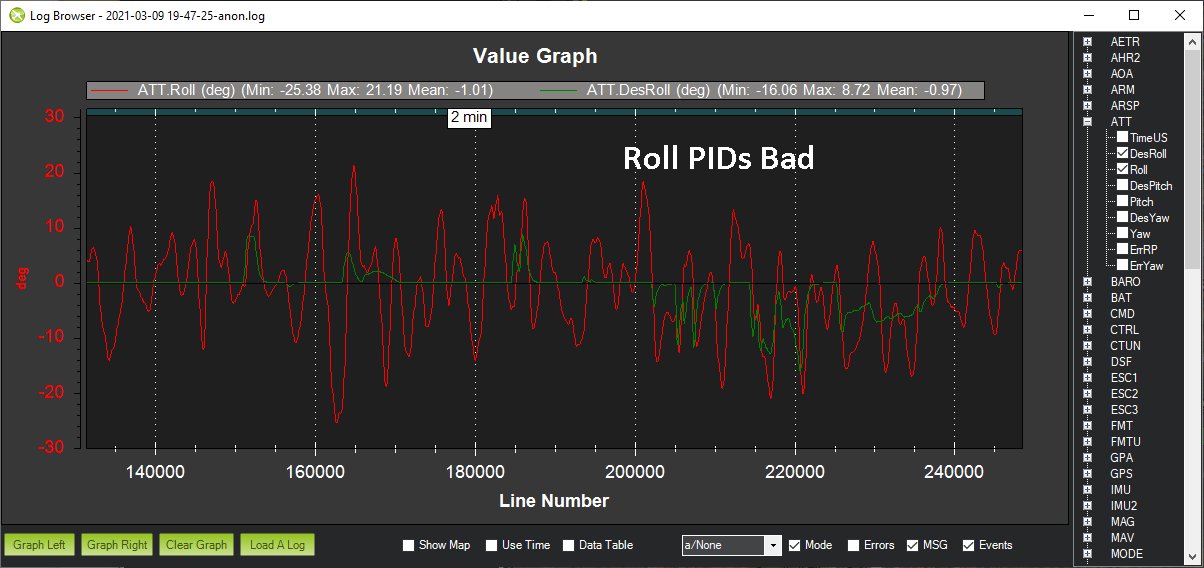
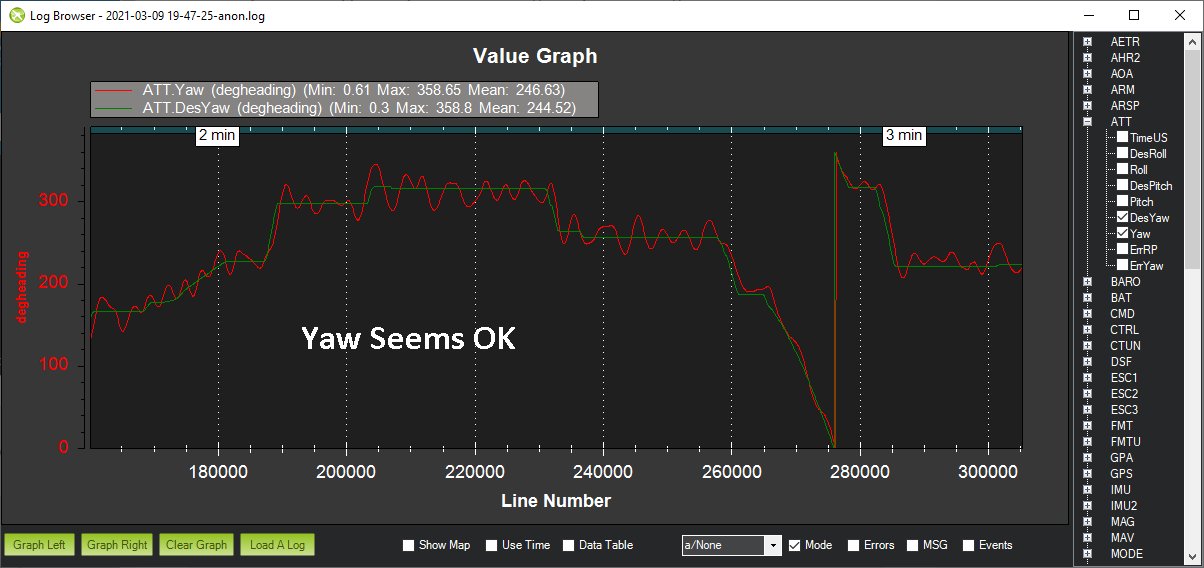
Next time, please post the .bin file instead of the .log file. Below is a quick graph of your 3 axis control or PID gains. The Pitch and Yaw look ok but the Roll needs some tuning. This is likely because the triangle in your tricopter setup has much longer distance from front to rear motors than it does from left to right motors.
So, initially you’ll want to tune the Q_A_RAT_RLL_P parameter. I can’t see what your current setting is because you didn’t post the .bin file. No need to post the .log file if you post the smaller .bin file. You’ll want to increase the Q_A_RAT_RLL_P value, perhaps by 0.2 increments until the hover behaves better. Use either QSTABILIZE mode or QHOVER modes. Save QLOITER mode until after the AR Wing is hovering nicely.
DesRoll: The pilot’s desired roll angle in degrees (roll left is negative, right is positive) Roll: The vehicle’s actual roll in degrees (roll left is negative, right is positive)
Could you tell a bit about your propulsion concept? Can the rear motor tilt for forward flight and yaw for torque compensation? The two front motors are fixed? Thanks.
The flights looked better than your original so the Q_A_RAT_RLL_P at 0.35 might be fine. The yawing on takeoff is likely due to the close proximity of the props to the ground. Does the yaw seem to hold ok when you are hovering?
You might try a test flight with changing Q_A_ANG_RLL_P from 4.5 to 5.0 and see what happens.
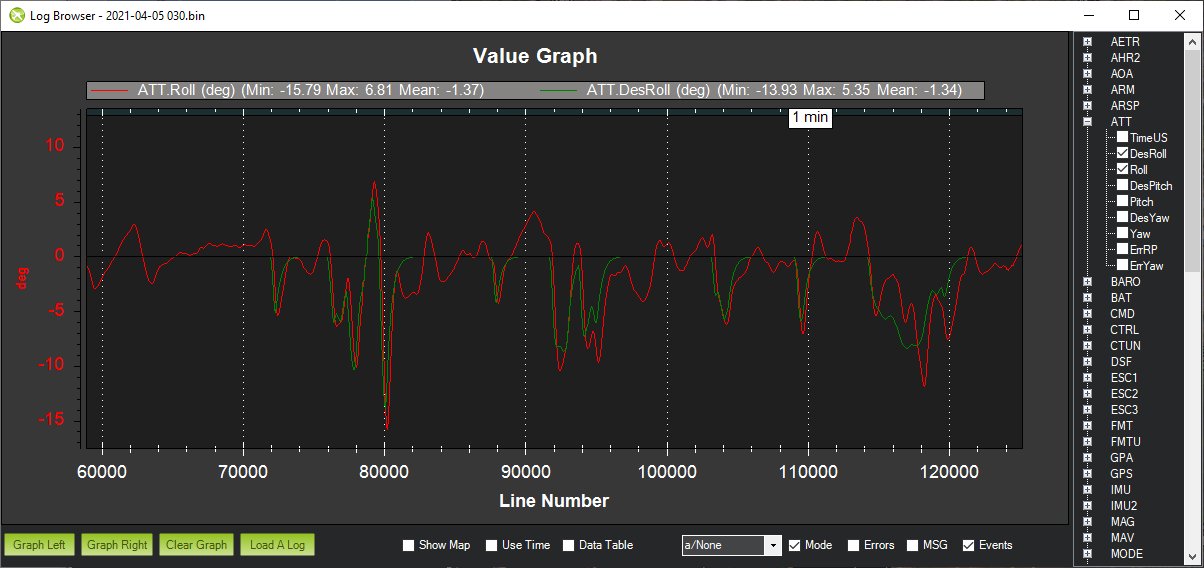
In the graph below, the data seems missing for parts of the ATT.DesRoll display but you can see that the green peaks approach the red peaks better.
The rear motor tilts 90 degrees for forward flight. The two front tilt 30 degrees in total (15 degrees each way) to control yaw.
I will post some more detail on the build if there is interest in this setup but in the meantime check out the Reverse Tricopter VTOL page it has some really great info.
Do you notice it starts off very responsive and seems to get further away from the mark as the flight progresses?
This is how it feels to fly it starts off feeling very stable and then begins to become almost unpredictable.
I did try to configure the notch filtering as per the wiki earlier on - do you think I may have misconfigured something that is also affecting these results or is it most likely just the tuning?
No, I didn’t notice that issue. I’m not sure what could cause that so I will look into the params further. If you are comfortable with controlling the height using the throttle, you could try some test flying in QSTABILIZE mode. This will omit using the BARO for Altitude Hold.
I didn’t find anything that would cause your response to soften over time. However, looking at the motor triangle distances from front to rear and left to right had me thinking that you could try increasing the prop size on the front two motors.
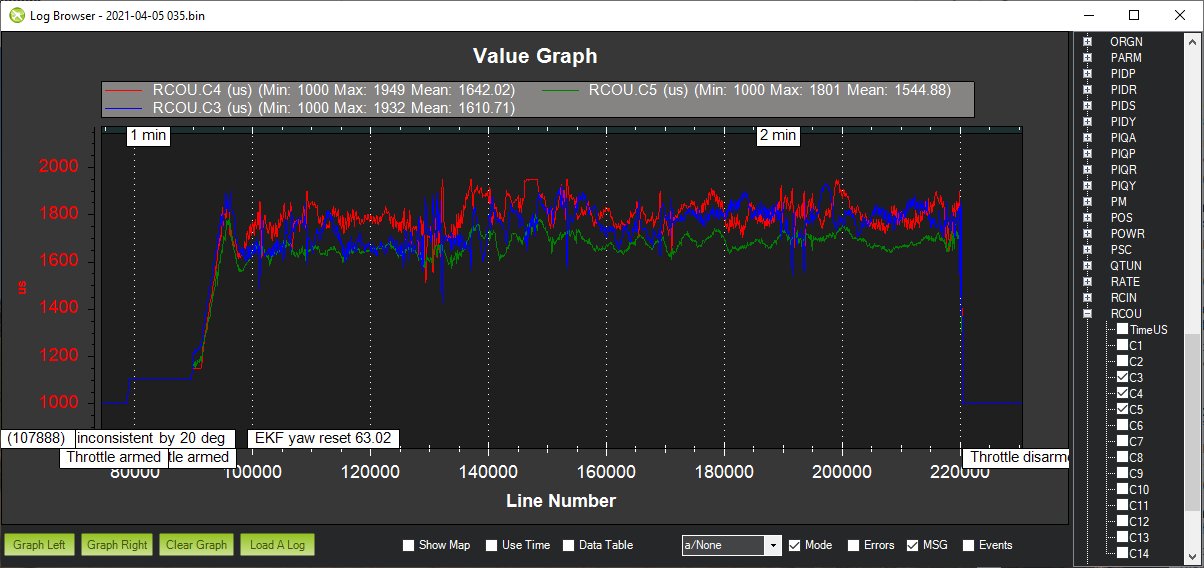
In the graph below, the three motor ESC lines are shown. It’s not bad but the weaker red and blue lines are your front two motors. This is also your control for roll. I’m not sure what prop sizes you are using now. Perhaps you can try a slightly higher pitch prop and see if it helps the control or gives you more headroom. It will also fly forward better with a higher pitch prop.
Many flights later it feels like its getting somewhere
Two flights this morning.
First one is Q_Hover and some Q_Loiter and second flight starts in Q_STABILIZED.
Note i am using a Lipo battery for the second flight - normally i use a 7000mah Li-Ion the weight is pretty close between them but there may be some slight differences.
The main reason for the video is i can see and hear some oscillation - i assume this is in the roll axis but there may be more to it.