This details the conversion of my existing AR Pro flying wing to an ArduPlane Tilt Tricopter QuadPlane. Like the Eflite Convergence, only bigger and MUCH longer duration (> 40 minutes with VTOL landing on 4SP2S 7000mah LiIon (really only good for 4500mah with a VTOL landing at the end).
Starting from a Ar Pro Wing, you will need the following:
Two 2806.5 1300KV Avenger motors, one 2207 1700kv motor for rear.
Three 35A ESCs. I used these: https://www.amazon.com/gp/product/B09F3G4KNB
HQ Normal and reverse thin 9x5 prop, Gemfan 6042 prop for rear motor
3D printed tilt rotor motor mounts. These can be used on normal Tilt rotor or Vectored Tailsitters (either +/-45 deg or 0-90deg). I use these on my Tricopter Tilt Rotor MiniTalon with much more powerful motors:
STL files: https://www.thingiverse.com/thing:4235323...I do not use the rail that goes below the wing for the 10mm tube...have found it unneeded with subsequent vehicles using this mount.
1 ZMR250 carbon quad arm (easy to find on web for <$10 for four)
2, 693ZZ 3 x 8 x 4 mm ball bearings (https://www.amazon.com/gp/product/B07DZCZWB3 10) for tilt pivots
2, 3mmx8 screws for the pivots
4, 3mm bolts for the motors
a method to couple the tilt servos to tilt mount. I prefer ball links, especially on my MiniTalon, but on this lighter plane, I just use one ball link and a Dubro quick link on the servo arm.
2, EMAX ES-09MD dual ball bearing micro digital servos
4, 3mm x 45mm bolts for wing mounts
4, 3mm x 20mm bolts for tilt mounts
8, 3mm washers
GPS: I used a BN-220 micro GPS . No Compass...using Plane4.1's compassless feature for VTOL/copter.
Airspeed sensor(optional): (I used Qiotek I2C digital). I mounted a 1/8" plastic tube out the nose andeven with the motors prop line to get it out of prop wash...I did not use a static tube/port, but just left the static line open on the airspeed sensor and mounted it at the front of the bay.As long as the bay is not getting pressurized this works fine for normal angles of attack.
A flight controller capable of running ArduPlane 4.1 or later with 7 servo/motor outputs and GPS/compass. I used a MatekF765-WSE.
4S Battery Pack. I used Kulosi 4s 7000mah pack (really only good for 4500mah if you want to land VTOL at the end).
I used a CADDX micro AIR unit with DJI Goggles and a Crossfire NANO…this gives me a solid two mile range on both systems with no special attennas. I used the Custom OSD feature with ArduPilot to get a decent OSD display in the goggles.
The conversion is very straightforward.
Remove the pusher motor and ESC. Print the 3D parts.
Assemble and mount the twin tilt motors on the wings approximately 250mm from the fuselage center line. Carbon tubes were 300mm long. Use washers and do not overtighten to avoid crushing tube walls. Assemble rear motor mount.
Flight Controller setup and calibration instructions (beyond following the wiki for Quadplane and then vectored tiltrotors)…setup for a Tiltrotor Tricopter QuadPlane per the wiki, using defaults for most params. It did require VTOL tuning to get a stable VTOL, params listed below:
I mounted the flight controller level in the bay. Then set TRIM_PITCH_CD for 5000 (5 degs) in order to cruise at 30MPH and 6.5A. I needed a little Q_TRIM_PITCH to get a still hover in no wind in QSTABILIZE...maybe a deg positive.
Be sure to get the motor direction and assignments correct, as well as the tilt servos directions. This can be checked by changing mode from QSTABILIZE to FBWA and back in horizontal flight attitude. Motor direction can be checked in the Mission Planner Motor screen.
I find that LIM_ROLL_CD of 4500 is too lethargic…I use 5500.
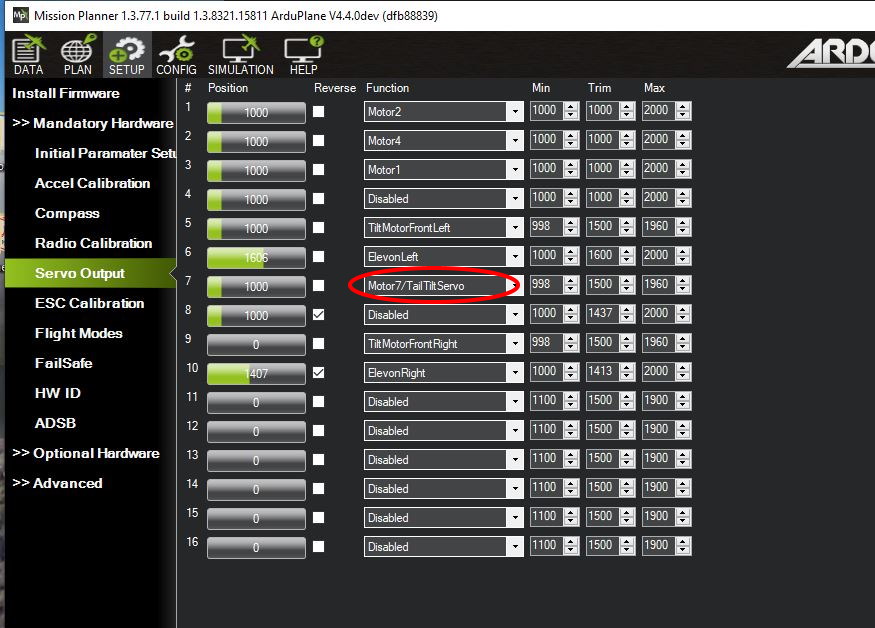
does not matter what an output function is assigned as being, if its not connected to anything…and that one is not…its an artifact of the frame type being TRI and outputs get automatically assigned for that frame type…in this case the rear motor(function 36) has no additional tilt servo since vectored yaw (tilting front motors ) provide the yaw…the default output setup for tri frames would have the 3motors+yaw tilt on outputs 5/6/7/8…but I moved them around and connected appropriately…
Hi thanks for creating this it looks awesome, some questions:
What is the AUW?
Why did you make the front two rotors tilt, instead of the rear rotor? It seems to me that if you just make the rear motor tilt then you can leave the front two as static. Then it will be less weight, and more efficient as the aircraft only has to power 1 motor for long cruising range…
because you wont have VTOL yaw control otherwise, unless you rig up a complicated and heavy dual axis tilt for the rear motor…one side to side for yaw like a tricopter and one for movement to fixed wing position
Hey Henry. I was pulling my hair out today setting up a tilt tri and my servo 7 kept getting reset. Do you know why this is a thing? If builders like yourself are adept enough to move things around appropriately it seems like we’re wasting a servo output here? Don’t mean to hijack the thread so I’ll probably hit up the discord too. Thanks for any input!
post your param file and a picture of you motor configuration…tilt-tri can mean a lot of things…
Discord is for developer issues…not support questions…this is right place for those
Hey Henry. Thanks for the response. After chatting with a dev pretty sure I was dealing with an old bug. I’ll update this thread with your requests after throwing master on my AP and trying again if it doesn’t work.
1.in our project we want to shutdown rear motor after transition phase only front two should work
2.when we are connect the servo to pixhwak and mission planner the wwe can’t able to adjust the tilt angle
yes i go through the wiki doc
we want to set the initial and final tilt angle by adjusting the PWM value of servo output but if we change the PWM value the angle not adjusting, we want the angle same like you 0 to 90 degree , by deflaut the value was 90 to -90 , but we don’t need that much angle.
how do you set the angle of tilt servos angle
yes, still my params, but were for earlier firmware…since then we added the Q_TILT_ENABLE param so if you just load those with latest firmware, none of the tilt param will be set…here is a set of the same params but with that param added… VTOL-AR_Pro_converted.param (29.6 KB)
here are the servo assignments as shown in Mission Planner:
note that for tri frames, ArduPilot always tries to assign the rear tilt servo (as well as Motor1/2/4) to an open output if they aren’t already assigned as a setup aid, but its not used on this model since vectored yaw is being used on the front motors…does not hurt anything, just not used…you can assign the others to any output you want (unless using BLHeli DShot on the motors, I am not)