A more intriguing aspect is that I saw attenuation of the signals between the solder pads and uC pins. Might explain why I had to add such low value resistors (that I soldered to the pads). This board has quite a bit of 300R resistors spread, between uC pins and pads for some that I checked. Probably as design measure to protect uC pins against user error while soldering, or shortcuts. Totally not worth for I2C If used there (I didn’t check this)
Even more so a good start (or ongoing) point would be isolating this (disconnecting compass) and test for baro errors imo. As example, mixing i2c devices with different voltage levels is not good at all. Even worse if these are at different impedance paths to the commond node. (etc)
I disabled file logging already too (giving me “AP log” or logger… errors sometimes) for this isolation (yaapu telemetry for the rescue then).
I guess it’s possible to narrow down what is really hardware ‘bugs’ (if any) and try some mods then.
So bad opportunities to fly for real are so scarse for me (and Im not sure about the incoming week) ![]()
I’ve been offered one of these for $25, I’m just wanting to use it for a plane so don’t need bdshot and all of that, is it fine for that use? I’m getting the FC only and using my own ESC. How would I wire up servos? Do I use motor outputs and remap them? Signal from the board and power from my pdb? Also how would I wire up the voltage and current sensors, I’ll be using this pdb, previously just used pixhawks where the wiring is much simpler. Thanks
http://www.mateksys.com/?portfolio=hub5v12v
Tempted to leave it and look out for another pixhawk.
Hey Rodrigo! Any luck with hardware mods?
Didn’t check/test anything in this regard yet. I was on vacation the last 7 days. Made a lot of flights but far away from the bench. I don’t know what’s up but not having bad baro health messages anymore like before (just occasionally) but a lot of “bad gyro health” ones instead (that wasn’t happening before).
Hi, can you build arduplane?
Tried to flash arducopter - got this error:

There are two different firmwares - one for the regular speedy bee and one for the Wing version - make sure you use the right version. If you flashed the wrong version you will have to update the bootloader again.
Hi Andy, is the Speedybee F405 MINI supported with the same firmware?
Looks like it has a different config in betaflight, so I guess not - I’ll put in a funding request to get one of these and the others
1 Like
The pinout is better than the v3 so bdshot can be supported
1 Like
An update in regard my last post here. I was using Betaflight when I measured I2C and added pullup resistors, like I explained.
The important thing is I don’t need these using Ardupilot.
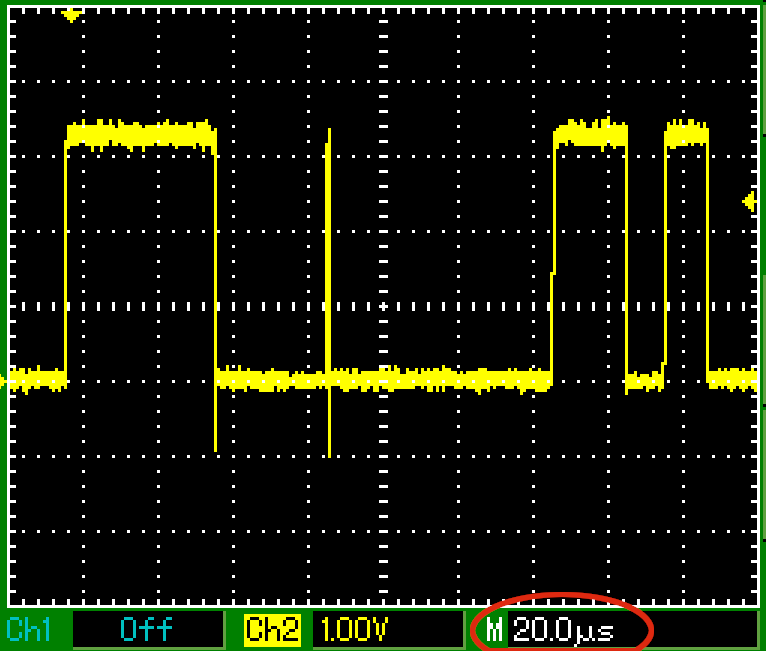
As reference, with gps/compass connected and configured, without pullups, I2C looks like
In Betaflight default settings:
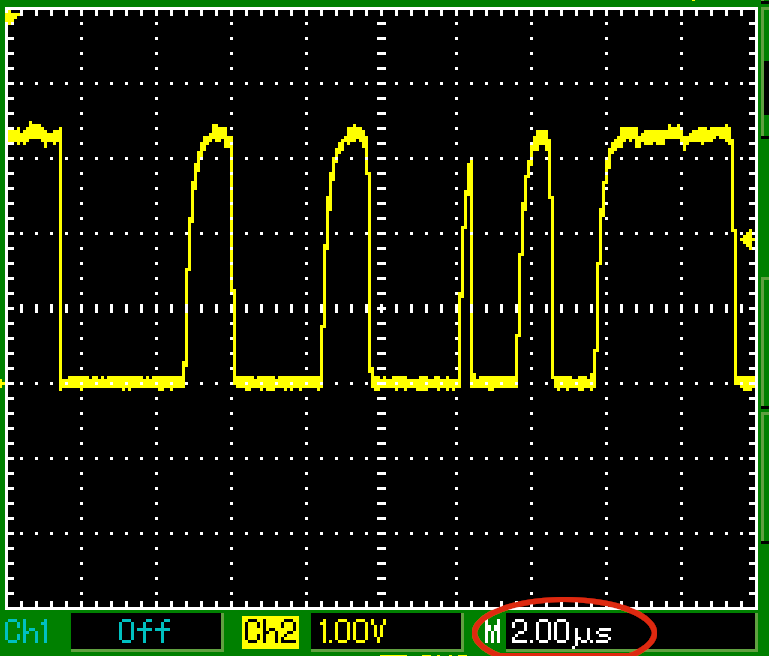
In Ardupilot:
I’m not sure which part fixed it but now I don’t have baro/compass/GPS health issues anymore. Consistent result for the last flights (~ 2 flight hours).
- Updated to 4.4.0
- Added the larger electrolytic capacitor I could fit in the board directly soldered to 3.3V LDO output (1uF cap)
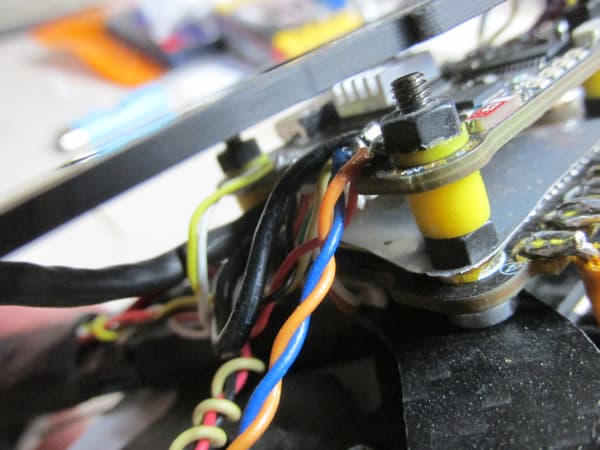
- Added a thin aluminium sheet all over ESC (from a beer can). Protected by a thick plastic layer below. Soldered directly to battery (-) one side of the sheet. The other side soldered to a FC GND pad, using a thicker wire (thicker than the provided GND wire to FC).
I was getting GPS issues too like dropping all sats without apparent reason (this looks like a common issue), and GPS health issues. Checking Vcc at GPS module it looked really ugly, noisy and voltage drops (spikes).
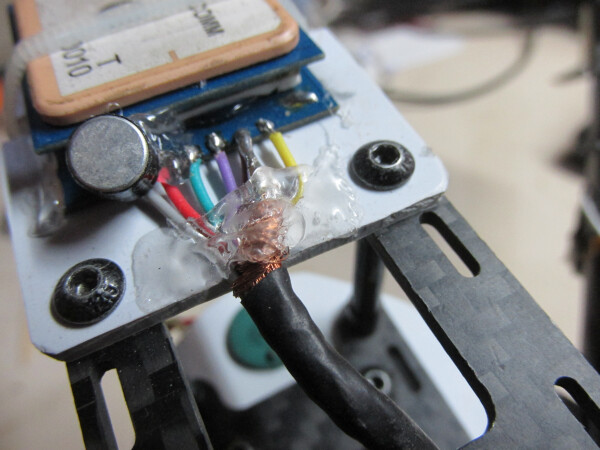
- Added 100uF cap to Vcc and arranged a shielded cable for all GPS/compass wires.
Would you be interesting in trying my no-DMA I2C PR to see if its still bad? I had issues on my speedybee, but maybe they were to do with I2C itself and not with DMA.
Yeah sure!
Can you point me to this PR please?
It’s actually the chibios changes that are important here + the lines in hwdef switching off DMA for I2C. If it works then bdshot is possible.
But to be clear - for me it works, but not reliably.
Thanks for the details Andy.
How it’s unreliable for you? Testing board in the bench? In a flying drone setup?
I will need to organize this (configure the building env etc) as I will not be able to use the custom firmware builder I guess.
But I will give feedback
I can do you a build.
Unreliable in that I would get random heights from the baro at times
Nice
Yeah I accept the build. Thanks!