[This thread has been taken out of Best gear for starting ArduPilot Mower]
And my initial response:
Yes… this is the part I have to learn (stick my nose in)…
I certainly have no clue about flight controller and remotes… I understand in principle the tech and signals, but not how it is being used and what it can do.
… and would need to look at what protocols are being used.
… makes sense, but does not provide the clean separation between manual and auto, as in not having to rely on any automation, GPS, and what not to control the mower maually.
Not being stubborn, my approach seems logical (to me at least ![]() ), but if someone tells me the the flight controller is not at risk of failing, I’ll have a closer look.
), but if someone tells me the the flight controller is not at risk of failing, I’ll have a closer look.
This is definitely the area I need to spend time and rely on others to help me out (until I got it and am comfy with it).
OK, second take (After re-reading your post)…
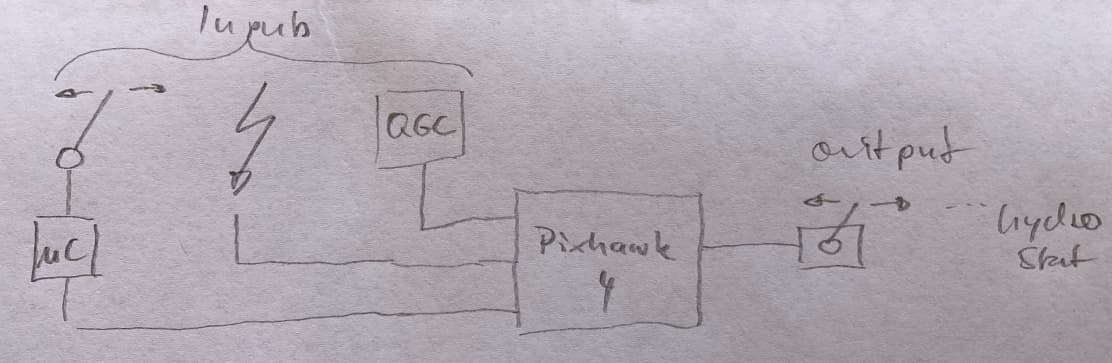
a) keep the autopilot in the loop during manual control
b) put a switch on the RC receiver signal line to toggle between the actual RC receiver and my surrogate micro-controller “receiver.” (This I don’t get)
c) keep the “flight mode” channel switched to MANUAL (I assume there is a channel for this, but what does it do; I am also not clear how many channels I even need; do I have enough with the gear I have got)
d) write code for servo drivers (this is really simple, essentially PWM)
e) switch all of their signal lines to another source (only downside to this is: I have to physically connect stuff; e.g., need connectors for it.
f) benefit of having data logging for all manual control, (that’s definitely a plus)
So what about all the safety logic; e.g., if this switch is ON|OFF, that function does work or not? Would this be programmed on the flight controller? What language? LUA?
This is where I do understand jack all.
Thinking about it again, I still think my clear separation of duty (auto/manual), where one mode does not relay on the other seems ‘clean’ to me. E.g., those who give me a helping hand, do not need to consider my ‘manual’ controller for any automation work (as long as I ensure the required pass-throughs have been catered for). I am not saying outright ‘no’, it just doesn’t click right now.
Anyway, keep it coming guys ![]()