Firstly, as I stated a few times: I am a complete novice when it comes to RC control. And I mean complete! I have no clue what tech I need; yes, I get sender/receiver and the principles of it; e.g., RTK, GPS, can upload firmware, push button here, blah, etc., but still, have no clue what language / data format these things talk.
So for those already heavily in this game, potentially for years, it may well be difficult, to ‘talk’ to a guy like me.
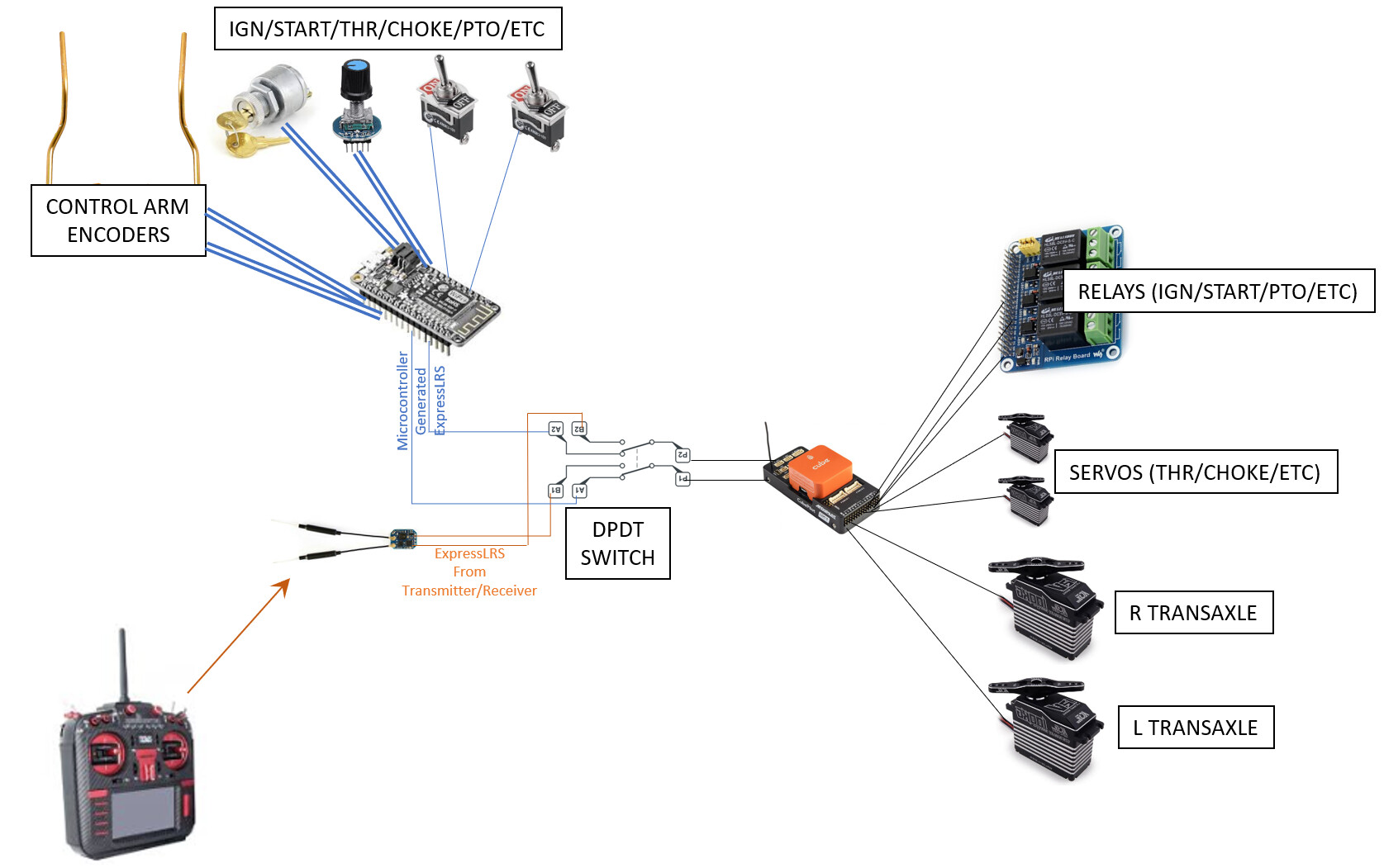
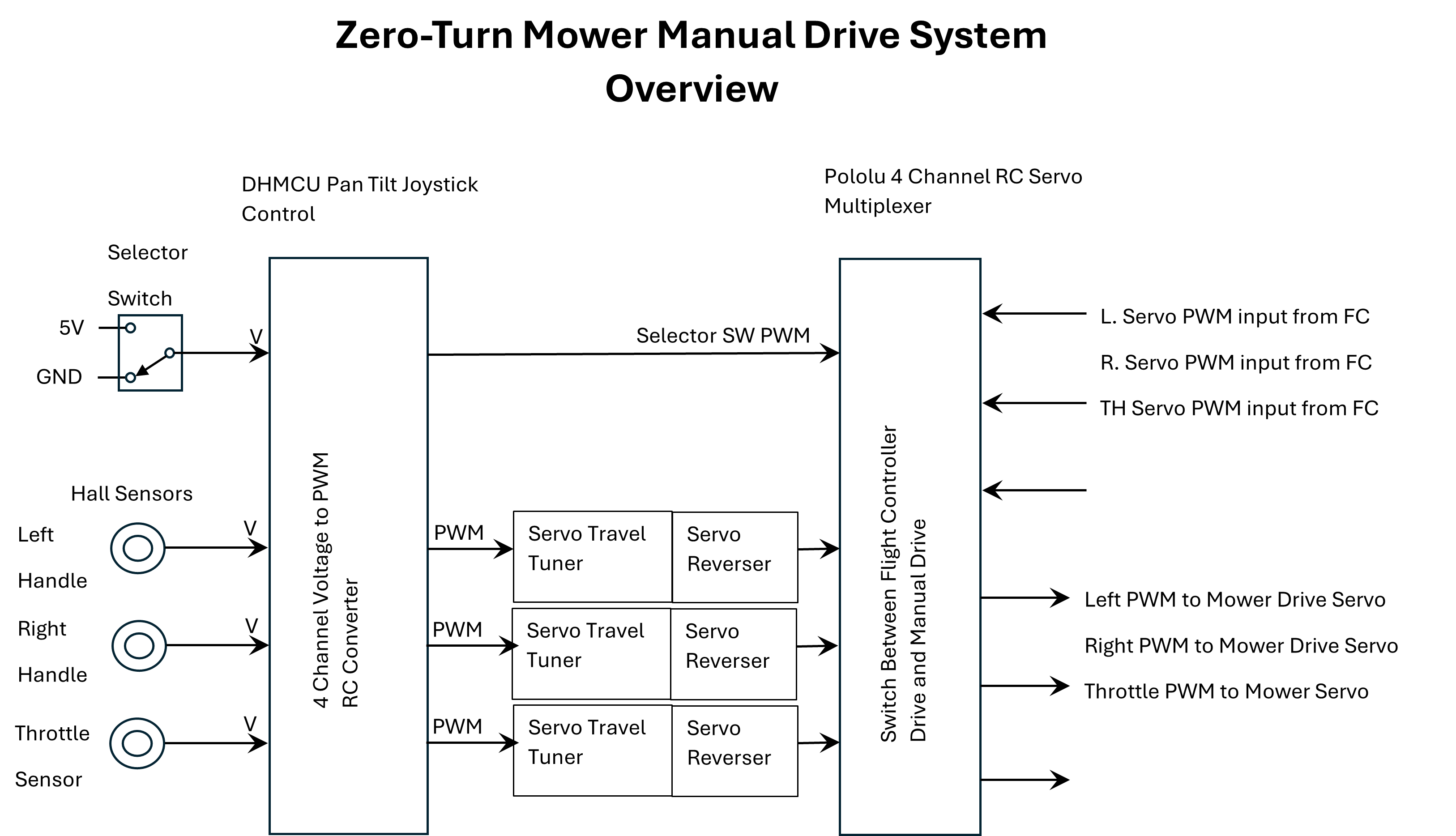
Secondly, I appreciate Yuri’s diagram; very clear now… in essence: the signal path is switched over. Yes, thanks; now I am clear on that.
So, from what I gather ExpressLRS is a transmission protocol.
Be it faster; why would I care? Or is there more to it? E.g., better (Lua) scripting, or other form of manipulation?
Excursion:
In January 2021 I wrote on this forum, in a post querying what I need to start off with a Rover, and announced, based on the input I had received, the following
I a couple days later I bought thr ArduSimpleRTK kit.
From my perspective I bought all this gear, which, due to my own circumstances, has been sitting around doing nothing for two years, and is now obsolete. Ouch! 
Does anyone know if there is an upgrade path for these RadioMaster bits to run eLRS on it?
As for the Pixhawk4, can I use it, or is it useless (e.g., in the sense it makes help less probable), as it does not have the memory/CPU do to the job? If it isn’t, I am in for another 1,000 AUD plus to replace it.
It was said the pixhawk4 would potentially work. Assuming I remove the manual control from the equation, then the remote (which I wouldn’t use; why would I? I thought I upload a mission and the mower executes it.) Would this not remove the need for eLRS?
Or do the Lua scripts that are needed to automate the mower need eLRS.
If the answer is “replace” the pixhawk4, which one do I need?
Is it this? Which is named HEX Cube+ PIXHAWK2 Flight Control H7 Orange cube

… found here: https://www.aliexpress.com/item/1005003749646742.html
Can I upgrade the RadioMasterTX16S? With what?
I have seen “Radiomaster Ranger ExpressLRS 2.4GHz Micro Module with PCB v1.6”; not sure where it goes; it costs 90 AUD.
I assume this changes the RadioMaster to use 2.4GHz?!
Can the Holybros 915MHz be upgraded? I assume they need to in order to ‘talk’ eLRS?! Do they need to, as these are for the telemetry link?!
Reminiscing on all this: the key question in my mind is "other than switching the radio protocol to eLRS, what other benefits would I get by switching, other than speed of transmission (which I do not see as an issue)?
To conclude, I am not arguing, I am seeking to understand. 
We can now continue the discussion based on a set-up without a manual operation requirement.
[Main reason for that is: it is a new protocol I have never worked with; I don’t have time for ATM (read-up, tinker, etc.); and it has only complicated matters for the purpose of ‘sole’ automation. However, I will tackle this at a later stage, and based on what I know now, can solve this myself as it is familiar territory apart from being a new protocol.]