Alisrour
September 9, 2019, 8:33am
1
2019-09-09 11-06-03.tlog (616.2 KB)
Please find the telemetry log of the flight , i am disabiling all arm checks since i am flying without GPS module and using APM 2.6 , as soon as i hover above the ground extreme oscillations occur and i cant know why please help!!
hosein_gh
September 9, 2019, 10:03am
2
please send BIN file for support queries
Alisrour
September 9, 2019, 11:42am
3
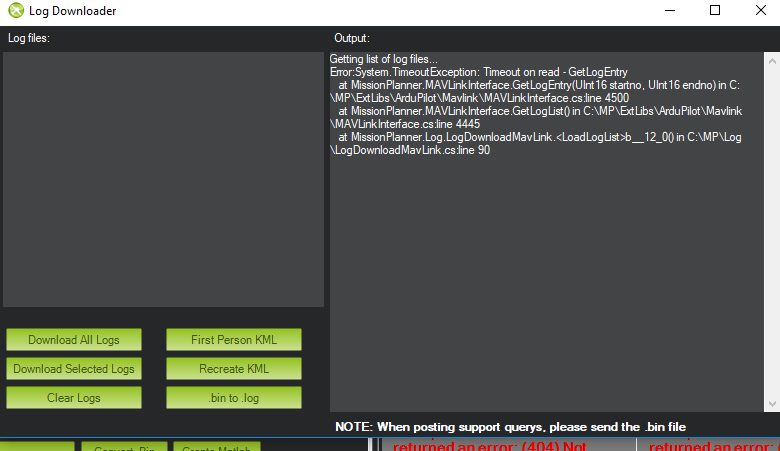
I know but unable to download data flash logs there is always error messages from Mavlink , so please help!
hosein_gh
September 9, 2019, 12:04pm
4
did you autotuned your copter ? (i asked this because of oscillations not logs)
Alisrour
September 9, 2019, 12:21pm
5
error when downloading data flash logs
Alisrour
September 9, 2019, 12:23pm
6
i didnt autotune because i am unable to lift more than 10cm because there is extreme oscillations like it is trying to stabilize but unable to do so.
hosein_gh
September 9, 2019, 12:33pm
7
try with a new cable and another usb port and latest mission planner.
hosein_gh
September 9, 2019, 12:35pm
8
its very hard to find your problem without log but i think its a tune problemhttp://ardupilot.org/copter/docs/tuning-process-instructions.html
1 Like
Alisrour
September 9, 2019, 12:35pm
9
Tried everything and nothing worked
hosein_gh
September 9, 2019, 12:36pm
10
so try APM planner or on another computer
Alisrour
September 9, 2019, 12:40pm
11
i think its tunning problem too well with the default pid settings of my aircraft having f450 frame with emax motors and escs simonk i should be able to takeoff right?
hosein_gh
September 9, 2019, 12:51pm
12
Please send more details about your copterhttp://ardupilot.org/copter/docs/tuning-process-instructions.html#pilot-s-preparation-for-first-flight
Alisrour
September 9, 2019, 12:25pm
13
This is my quad with emax motors and simonk escs with apm 2.6 and intrested just in stabilizing the drone so no GPS and disabled pre arm checks.
hosein_gh
September 10, 2019, 7:34am
14
Its must fly well
Alisrour
September 10, 2019, 8:07am
15
Intrested for now in stablizing it and then add gps
hosein_gh
September 10, 2019, 8:09am
16
For stabilize you have to tune your copter
1 Like
Alisrour
September 10, 2019, 8:35am
17
Okey i will tune it but what is the best procedure to do so by the ropes or is their a specialized handler that i can put the drone on for tunning
hosein_gh
September 10, 2019, 9:10am
18
This is the new and most complete instructions for tuninghttp://ardupilot.org/copter/docs/tuning-process-instructions.html
1 Like
Alisrour
September 10, 2019, 9:35am
19
Is it necessary to change default pids to my quad for it to stabilize in the air? Or these procedures can get it flying?
hosein_gh
September 10, 2019, 10:44am
20
if your copter is not stable in air and shaking you have to change PIDs as described in wiki i was send