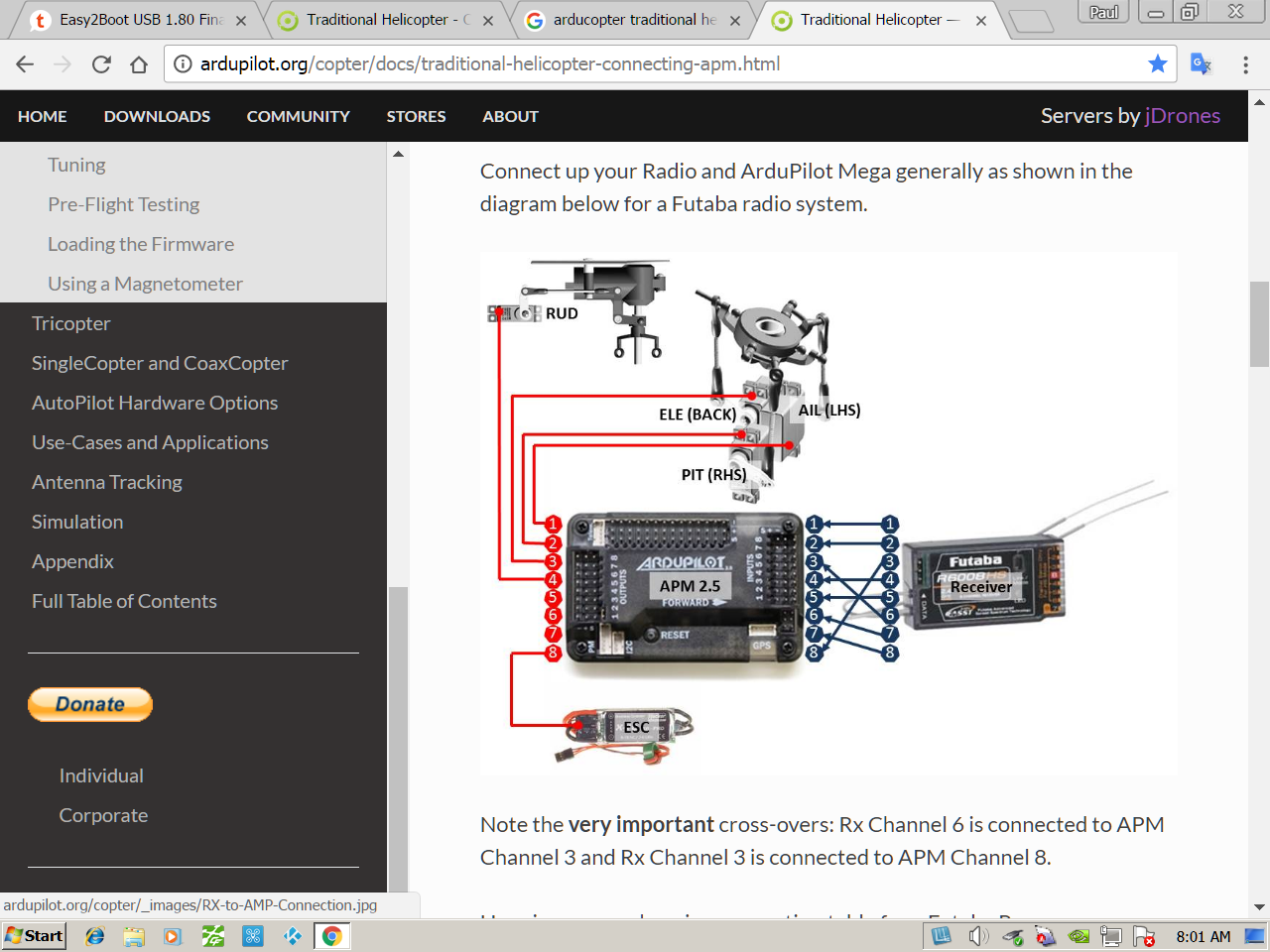
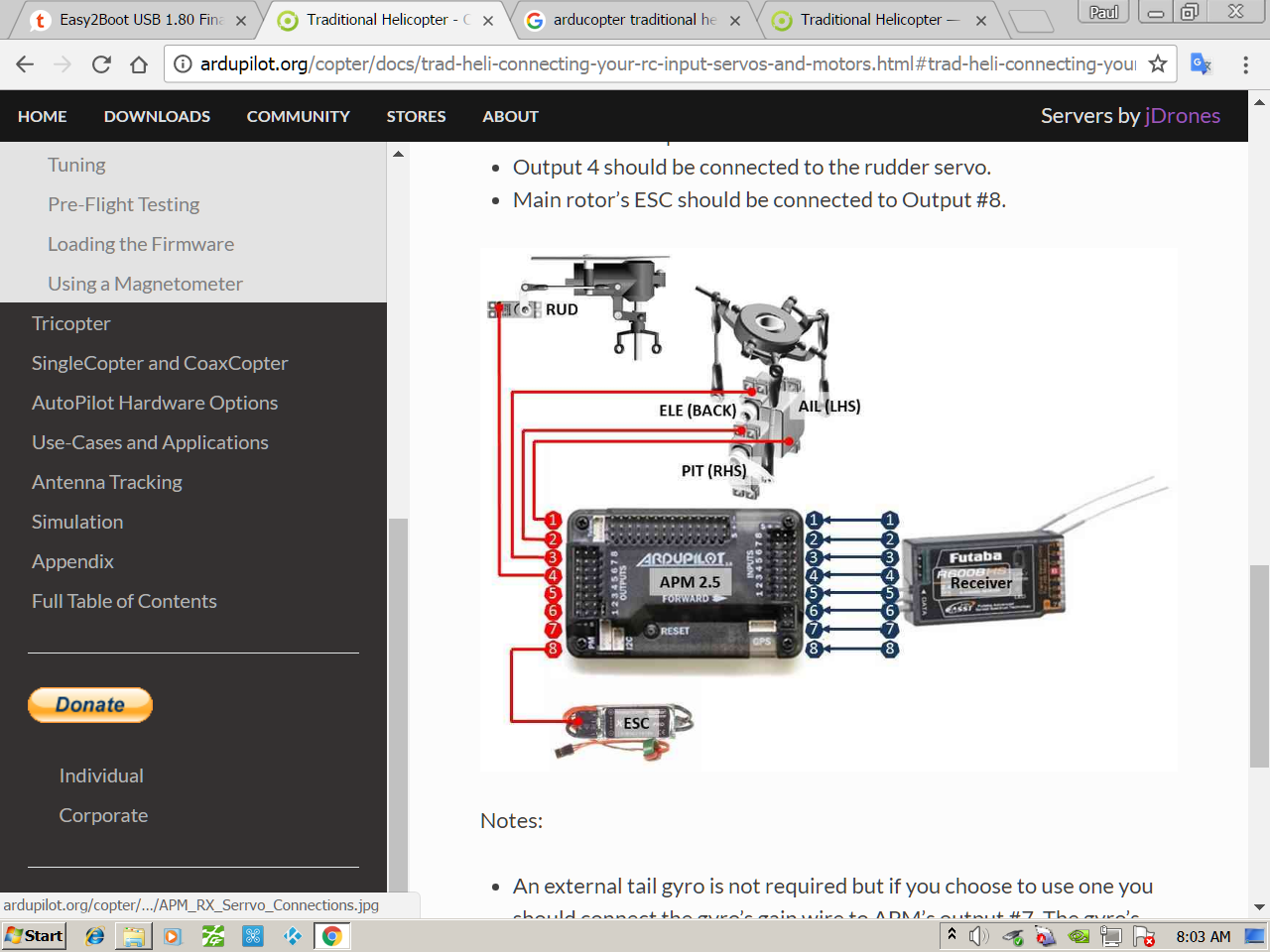
William, I guess I can see why it works in Heli mode. Channel 6 would be collective pitch, which you have hooked to the #3 pin on the APM. I don’t understand why it didn’t work with airplane mode with your receiver. Unless the RC map for throttle has to be changed for 3 for that. It is currently 8. As long as it’s working don’t fix something that’s not broke.
You have obviously hovered the helicopter. And you still have to do a bit a bit of a “stick dance” to hover a FBL helicopter with a stabilization system. Flybar is rate only. So if you’re in hover and tip the heli ahead by say 5 degrees, center the stick and it just stays at that attitude and goes. The difference with FBL is that when you tip the heli ahead to move and recenter the stick the flight controller should level the helicopter again and it kind of “drifts”. So this makes it easier to hover because it always tries to level the helicopter when you center the cyclic. But myself, personally, have never been able to get used to the “feel” of flying a FBL helicopter in Stabilize. It’s not natural. I pull the nose up when flying, and feed it a little collective and I expect it to climb to a vertical nose-up attitude and it won’t do it. And acro is supposed to be more like flybar but the way my helicopter is tuned that don’t work either. So if I want to fly to have fun I still go to the flybar. 
Your P gains don’t look too bad. You don’t have a compass or GPS so you’re basically just using gyros. Turning up your rate I gains might help with hovering. Most people would use around .35 for those and yours are set at only .1 as shown here below. I would suggest to turn those up by maybe .05 at a time until you get into the range of .3 to .35. They won’t cause a bad wobble. If you get too high you’ll get a sort of softer slower wobble.
RATE_PIT_I,0.1
RATE_RLL_I,0.1
And typical for the IMAX params would be 4400 for most helicopters, which are still at the default of 1000 as shown here
RATE_PIT_IMAX,1000
RATE_RLL_IMAX,1000
If the stick input seems a little sloppy and you want it snappier you can turn up the rate feedforward. Those params are these two below. I would suggest turning them up by .01 at a time to “sharpen” the handling. These won’t cause any oscillation at all - just quicker response to your stick inputs. Typical would probably be in the range of .03 to .06 depending on how you want it to feel.
RATE_PIT_FF,0
RATE_RLL_FF,0
And then your throttle accel might be too high for helicopter. It is currently set to 0.5 as shown below. This will usually make the collective bounce on most heli’s when you go to Alt Hold. I would suggest 0.3 for that.
THR_ACCEL_P,0.5
The last thing I’m wondering about, is your tail holding ok? Or do you have to fight the yaw all the time? If you have to fight the yaw to hold a heading, try turning these up. Yaw I maybe to the .1 to .15 range. And yaw IMAX to 2500. With no compass and just gyros that still should work (I think).
RATE_YAW_I,0.02
RATE_YAW_IMAX,1000