Hi I just built aDIY f450 with Ardupilot ,radio link RX&TX.Did everything by the book.Motors spin in correct order but I have no pitch,roll or yaw.Everything is connected correctly.Radio calibration comes out good.But I have no controls…Looking for help
This is roughly my setup. Can you generate a log .bin even if just sitting on the ground, and upload? To see the RCin values would at least confirm the APM is “listening” to the receiver, and possibly other stuff.
Hi Thanks for the response,This is my first quad build I normally do helis,I’m not familiar with generating a log also I don’t have any telemetry setup.I think APM is listening to RX as my motors run but if you can guide me a bit I Should be able to generate a log with little help.By the time I’ll do the search on line about generating a log.
Thank you so much
So you arm it and throttle up, the craft lifts off the ground and you have no control? By posting in AC 3.2 you have an obsolete APM Flight Controller then?
Yes I can arm it up and it could lift off but if I let it will have no control to save it from flipping and crashing .I hold it up above my head give it some power the thrust is there but applying any controls it does not respond to that just the throttle .I do have Ardupilot flight controller in it.After connecting to mission planner all the controls show values and just downloaded a data report from the MP I can try and post it if not I will have to email it to you that is possible. first I’m gonna try upload here.Appreciate your responsesLog File C:\Users\User\AppData\Local\Temp\tmp1EFE.tmp.log
Size (kb) 20.9072265625
No of lines 498
Duration 0:00:18
Vehicletype ArduCopter
Firmware Version V3.2.1
Firmware Hash 36b405fb
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - No MAG data, unable to test mag_field interference
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Motor Balance = UNKNOWN -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = GOOD -
Test: PM = UNKNOWN - No PM log data
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = GOOD -
here is that report
Well, Ardupilot is firmware not a Flight Controller. But anyway, post a link to that log, Auto Analysis is mostly useless. And just to emphasize, you will not get a good level of assistance with an obsolete Flight Controller. The best fix you could make is to replace it with one that runs current Ardupilot.
Hi Dave Sorry the flight controller reads Arducopter on it Came with the hobby power F450 kit that I ordered from amazon a while .So you think flight controller causing the issue !! I do have another one that reads Arducopter V2.8 on it This one may have some firmware installed on it as I was trying to use it on another quad or should just get a new one if yes which one you recommend
thanks again
Tony
Replace it with a Pixhawk or a Pixhawk variant. Or one of the many other boards supported that will run latest Ardupilot.
https://ardupilot.org/copter/docs/common-autopilots.html
Hi Dave thanks I’ll order a pixhawk and will get back to you soon as I receive it .Stay healthy
Thanks for the help.I may bug you again…Happy flying.
Thanks
Tony
Hi Dave which firmware should I use missionplanner or APM planner 2.I have the Pixhawk coming in couple of days.
Thanks
Hi Tony-Mission Planner if you are on Windows. And when you get your Pixhawk install current Stable Arducopter and post any question you have in the 4.0 thread. It’s mostly crickets chirping in this one 
Hi Dave good morning I have both Mac and Windows so should I just delete the windows mission planner I have and download the latest from the site!
Thanks!!
After installing the latest version of Mission Planner on you PC go to the help screen and press the “Check for Beta updates” button and install that. There are features from the latest stable Arducopter that are best supported from the Beta version of Mission Planner.
thank you so much I’ll do that hopefully I’ll finally have a my quad flying
Thanks
Tony
While APMs are outdated, they’re not worthless. I use a fleet of them quite capably because they’re cheap and they work just fine for many purposes. Just buying a Pixhawk is not going to fix your problem though it will add some features and modes, and get your ticket to the AC4.x forums. Still, I hate to see you give up on the APM.
You probably already have some logs on the APM from your flights so far, but if unsure, do a test flight, showing whatever control you do have (eg: throttle) and then connect to your computer.
In Mission Planner, go here:

Download the log(s):
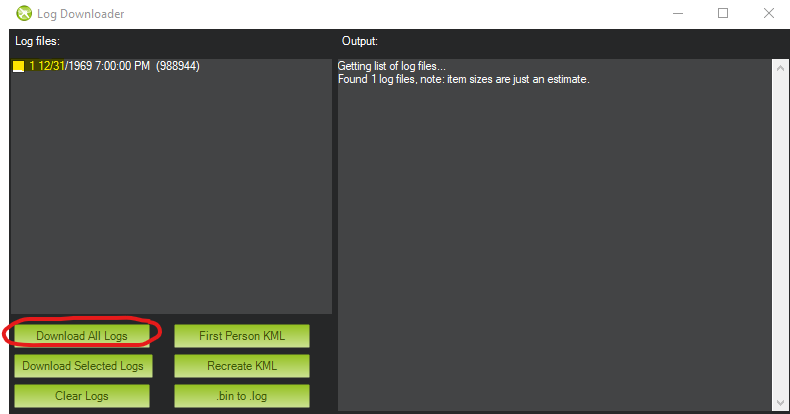
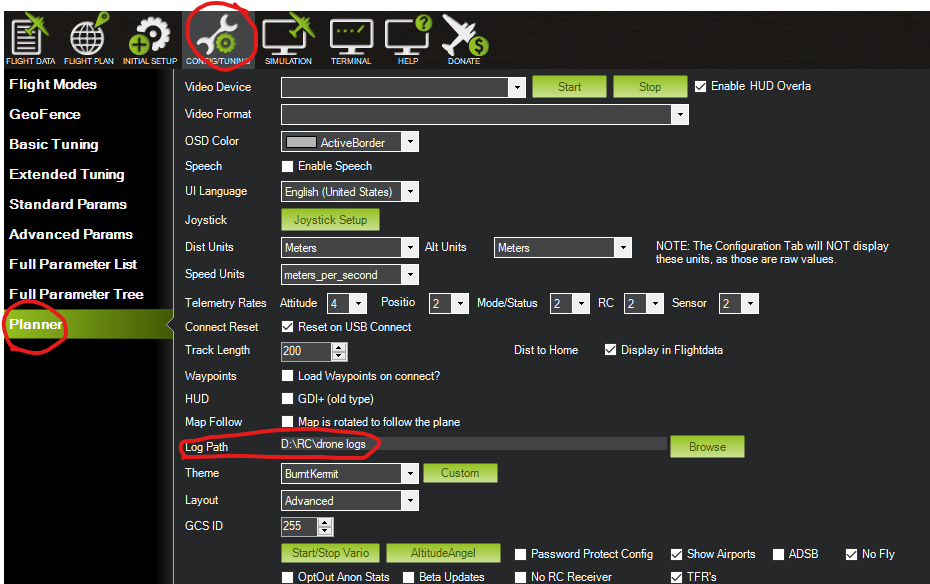
Then look in the folder indicated here:
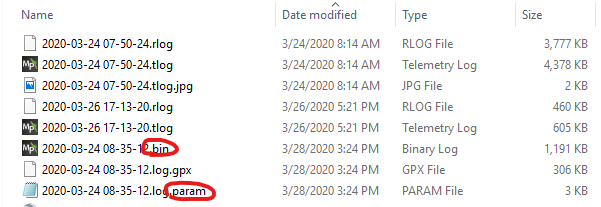
Using the upload button on this forum thread (looks like a horizontal bar with up arrow) upload the .bin file and for good measure, the param file:
I will review the log for possible solutions. If you wish to do the same, use:
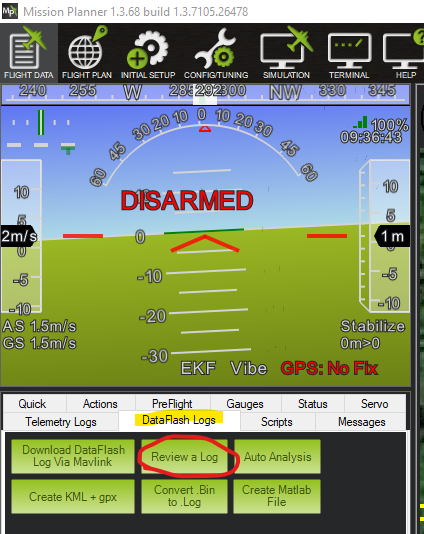
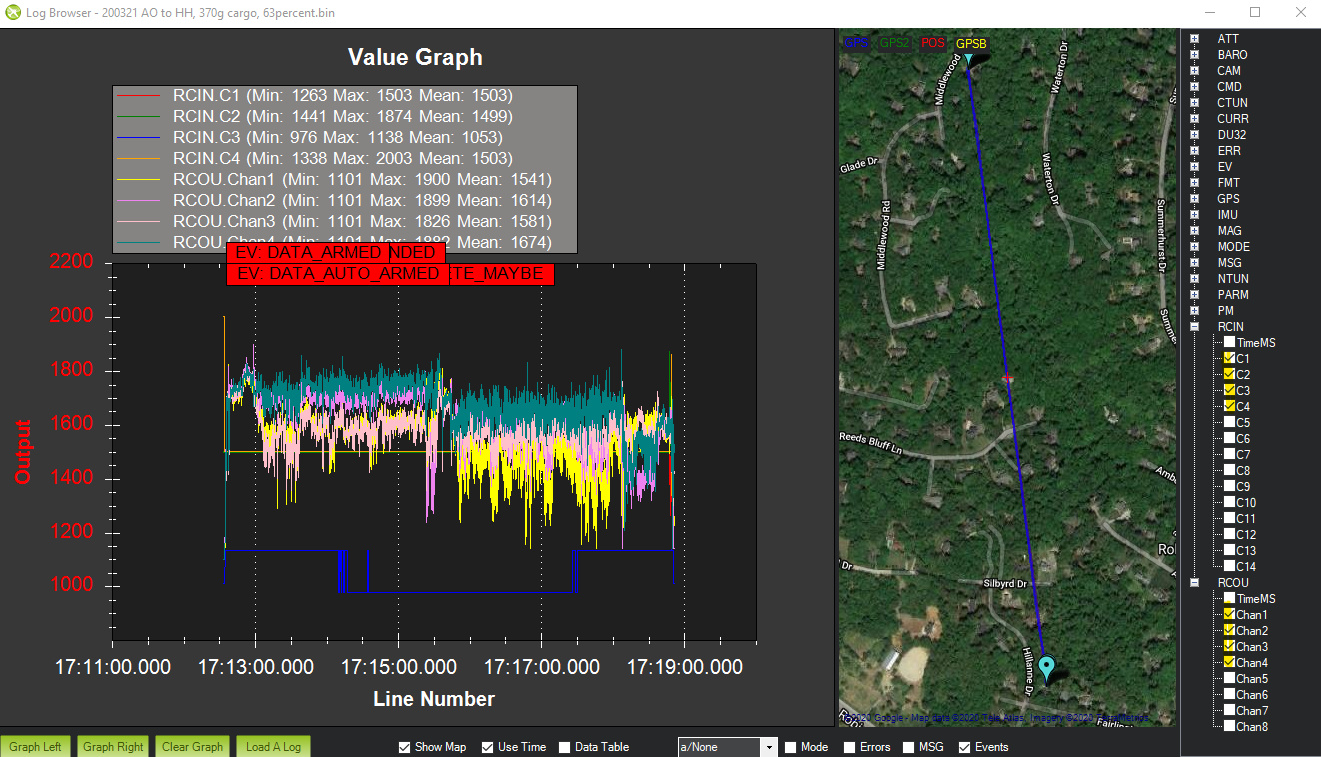
There are many data elements but the first one I’m interested for you is the RCin and RCout. This will tell us 1) if the APM is receiving PPM signals from the receiver and 2) if the APM is trying to control the attitude by altering the signals sent to each ESC-motor.
Hi thanks for the response,I’m unable to run a test flight not having any controls if I try to fly the quad it will just tip over and do some damage.But I will try to get some more data following your instructions.
thanks
Tony
1 12-31-1969 7-00-00 PM.bin.log.param (5.0 KB) 2 12-31-1969 7-00-00 PM.bin (26 KB) 2020-03-02 21-21-03.tlog (48.5 KB)
This is what I was able to get ,Hope this helps
Thanks for working with me
Not much to be learned from that log. Not sure how it was throttling up as there is no RC Input on the throttle channel. You don’t have logging turned on to see RC Outs. You don’t have Voltage or current setup either so there is even less to look at.
HI Dave how do I turn on the logging and setup the voltage ,I just followed the instructions for
initial setup.Radio calibration I can see all the bars moving same in failsafe page in mission planner all the values move as I apply the TX throttle, pitch ,yaw and roll sticks but after arming up only throttle works.
thanks again
Tony
P.S It also shows an err pop up while downloading all logs and it only downloads partial logs.
Also shoots a verbal message gps needs 3d fixing and few other I don’t know if that is normal