I’m new to Arducopter, I assembled my quadcopter DJI 450, and when trying to fly it, it tilts to the left, I have done all calibrations many times and done the test motors in the mission planner ( that the others suggested in similar topic). Now my quadcopter after checking all things when take-off is immediately flipping over (tilts left and flips).
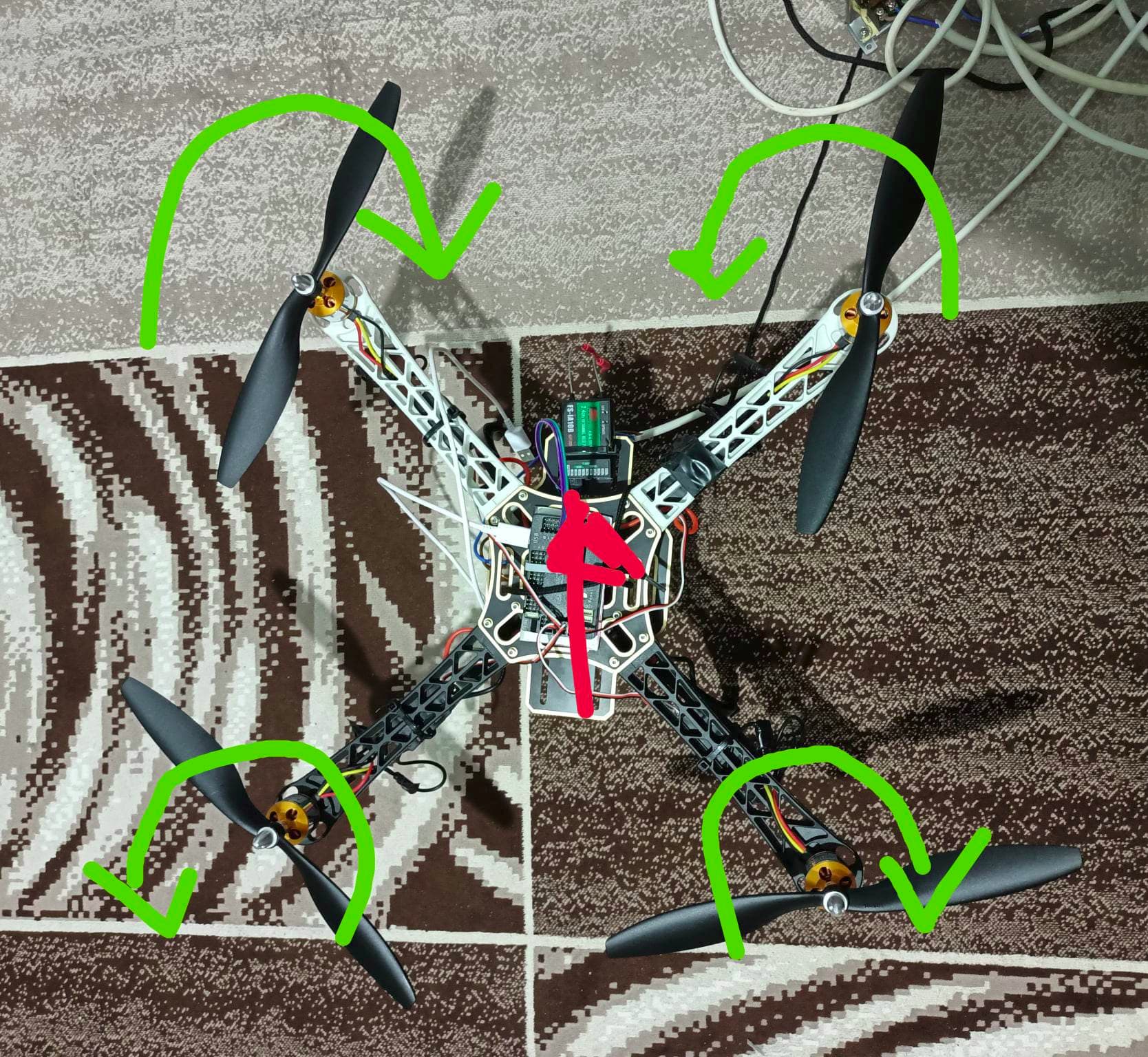
Here is the link https://youtube.com/shorts/_K0JtEfujmE?feature=share to my video of the motor test in the mission planner ( by order test motor A, test B, test C, and test D), the white part in the frame indicates the forward.
Here are some general questions to look at: Are the props all tight and secure? Is the radio calibrated? Are the inputs from the radio working in the correct directions? Are the radio trims turned off? Where is the GPS/compass module? Did you do the calibrations of the compass with a GPS lock? Has the orientation of the compass changed since you calibrated it?
Just a word of caution, in your motor test video you had the props installed. That’s pretty risky. If the motor RPM is too high or something goes wrong you could have a pretty violent mess on your hands. It’s best to do that with the props removed.
Is the radio calibrated? Yes, I have calibrated many times
Are the inputs from the radio working in the correct directions? How can I check it?
Are the radio trims turned off? I don’t know, please would you explain to me how to turn it off
Where is the GPS/compass module? I removed it, and when it is on APM, the quadcopter flips immediately, when I removed it, the quadcopter try to take off a little bit and then flips
Did you do the calibrations of the compass with a GPS lock? What does mean GPS lock, it means jumper?
Has the orientation of the compass changed since you calibrated it? First time, when I tried to calibrate the compass, I couldn’t do it and I got this message: "BAD COMPASS HEALTH ", so I used GPS with a compass and I did calibration before I assembled the quadcopter, NB: I removed the jumper when I did calibration
Thank you for your advice, yes it very dangerous, it injured me when I did ESC calibration, but in the Motor test the value of the throttle is only 5% for a duration of 2s
The problem you have is the APM Flight Controller hasn’t been supported for many years and there are not many around that can help in a specific way. For example the “jumper” you are talking about may mean nothing to most but I do happen to recall it’s an internal compass jumper. Doubt that’s the cause of the problem.
Use mission planner. Roll, yaw, and throttle should move as you expect. Pitch is backwards (push the stick forward and the pitch value gets smaller).
Make sure that the when the sticks are neutral that the radio output is also neutral. RC plane people will use the trims. Just make sure it’s all centered.
Well that’s a problem. ArduCopter needs a GPS unless you deliberately setup a non-gps configuration. I’m going to guess that’s not the case here.
GPS lock means the GPS receiver is tracking enough satellites to have an accurate position information. But if you don’t have a GPS you have a bigger issue.
As for the jumper, @dkemxr is right and that means nothing to me. You might want want to consider upgrading if you can. Either way, you need to sort out the compass and GPS issue before you get too much further.
One more comment. None of those log files are valid. If you can attach them here directly then they are generally not good. Arm the craft and apply enough throttle to spin the motors but not take-off. Do this for ~30s and then post that log file. Perhaps delete all other log files 1st so you are posting the right log. Use a Cloud service (dropbox, etc) to store the file and post a link to it.
Are the inputs from the radio working in the correct directions?
Use mission planner. Roll, yaw, and throttle should move as you expect. Pitch is backwards (push the stick forward and the pitch value gets smaller). Yes, all the inputs from RC are working in the correct directions (I checked it using Mission Planner)
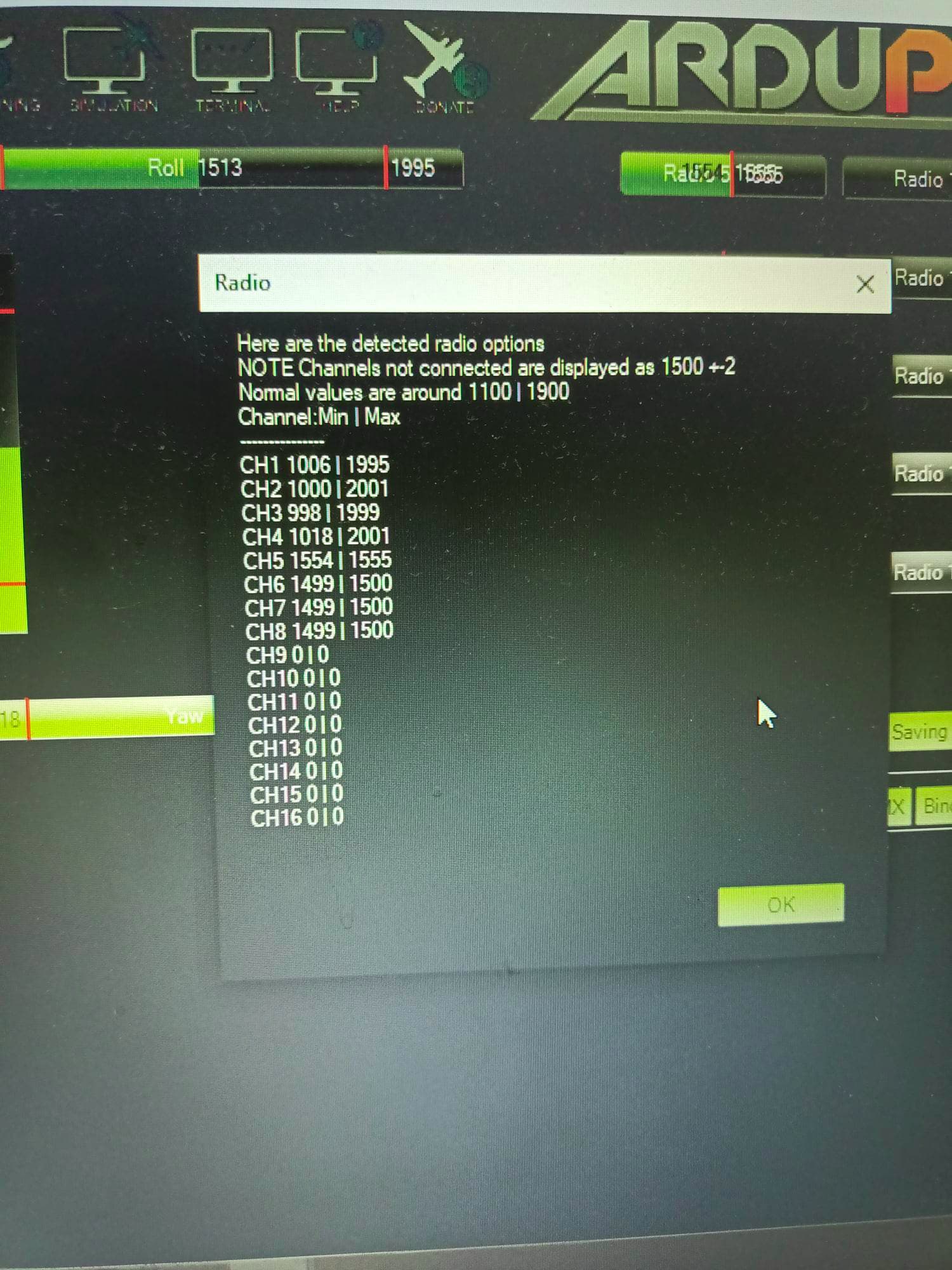
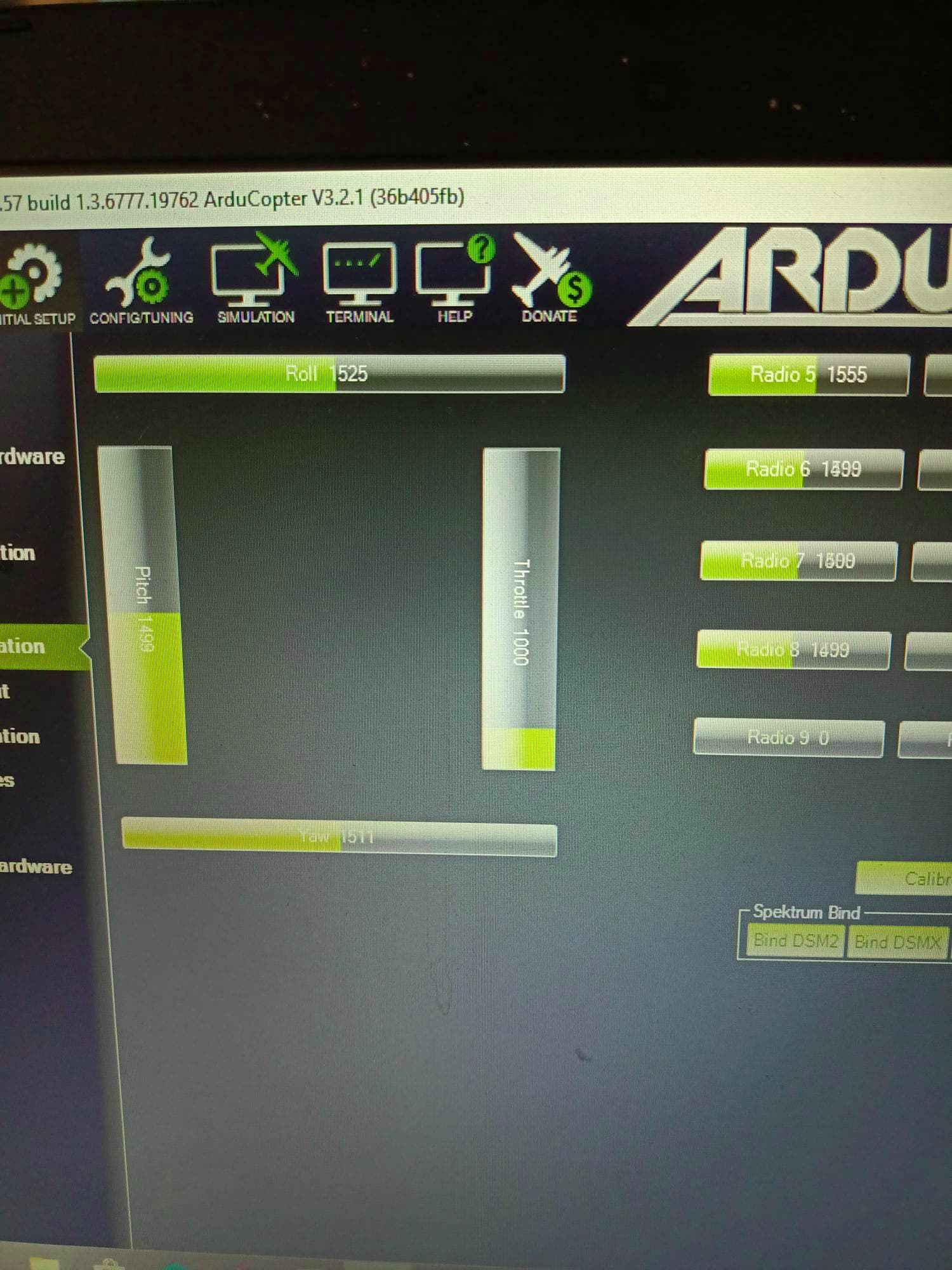
Make sure that then when the sticks are neutral that the radio output is also neutral. RC plane people will use the trims. Just make sure it’s all centered. These are the values of RC calibration
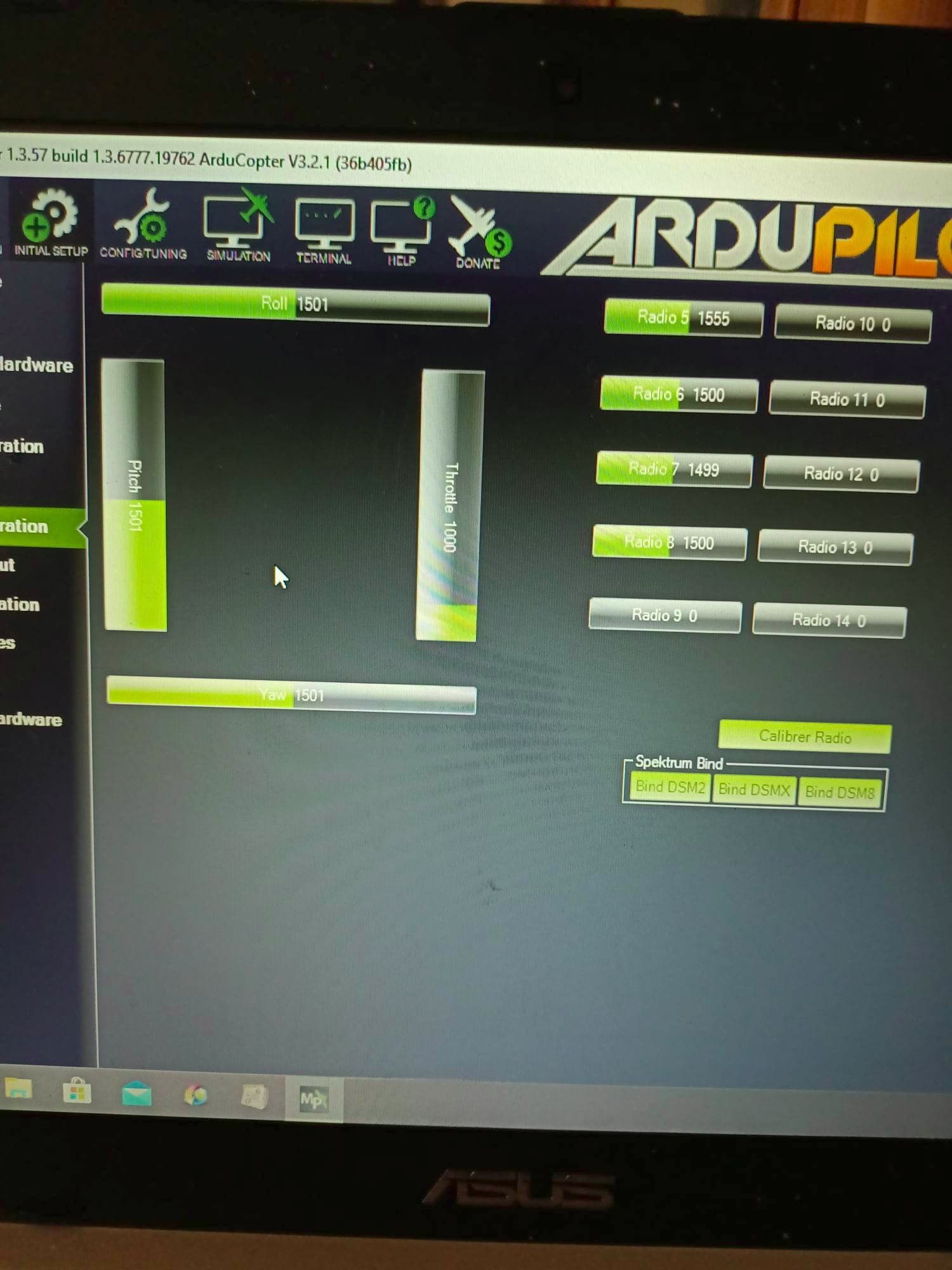
As you explained, I noticed that the roll is not centered exactly, So I changed it from 1525 to 1501 using trims in the transmitter ( Now I understand what is trims, thanks a lot), the new values are:
Then I tried to fly the quadcopter (Indoor without GPS) and it still tilts and flips but it is much better than it was (there is a significant improvement).
Well, I’m not sure how much help I can offer. The log file doesn’t open in Mission Planner, it probably requires a very old version of Mission planner to open it that I don’t have.
Is your radio set to AETR? When you move the sticks on the radio do the correct bars move on the Radio Calibration screen?
Sorry but all I can further suggest is that you replace the flight controller with a supported one.
I’m in the same situation as Dave, and the programs I have don’t work well with those old log files. I don’t have any solid answers for you but I can offer a few suggestions.
Check the center of gravity is more or less neutral on the quad. It should be very near balanced.
Is your battery in good condition and fully charged?
You need to sort out the compass issue.
There is the chance that that old flight controller is just no good. And I don’t know these older versions of the firmware to offer any really useful advice. Maybe another user might have a suggestion but I don’t know I can offer much more.
I couldnt open those logs with an old version of APM Planner either.
Definitely compass needs to be verified working properly, and GPS needs a 3D Fix before you try and fly.
Flying indoors is for after you’ve done all the tuning and got everything working perfectly out in the field, and set GPS-related parameters suitable for indoor flight.
I would say just get a newer flight controller, because no one will be able to help with any issues that come up even if you do get it flying properly.
Currently, I can’t buy a new FC ( for lack of time), but in the future, I will buy one, would you suggest to me which is the best FC (the best FC with the best price)?
Log file: I don’t know how to solve it, maybe because I use an old version,
Compass: I recalibrated today,
Battery: Currently, I use a power supply 12v-40A ( my friend used the same for his quadcopter and it worked like a charm)
Radio: is set to AETR
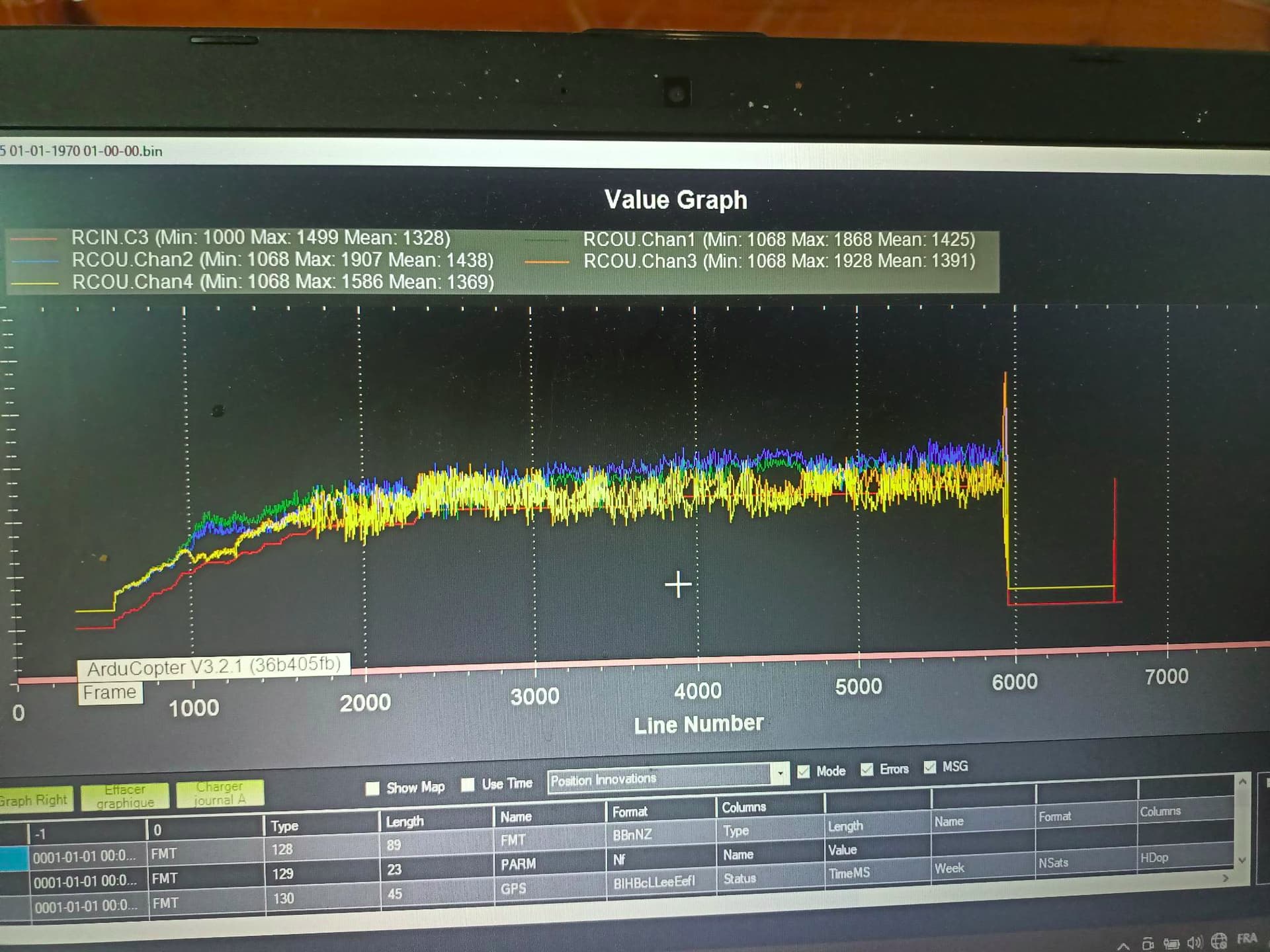
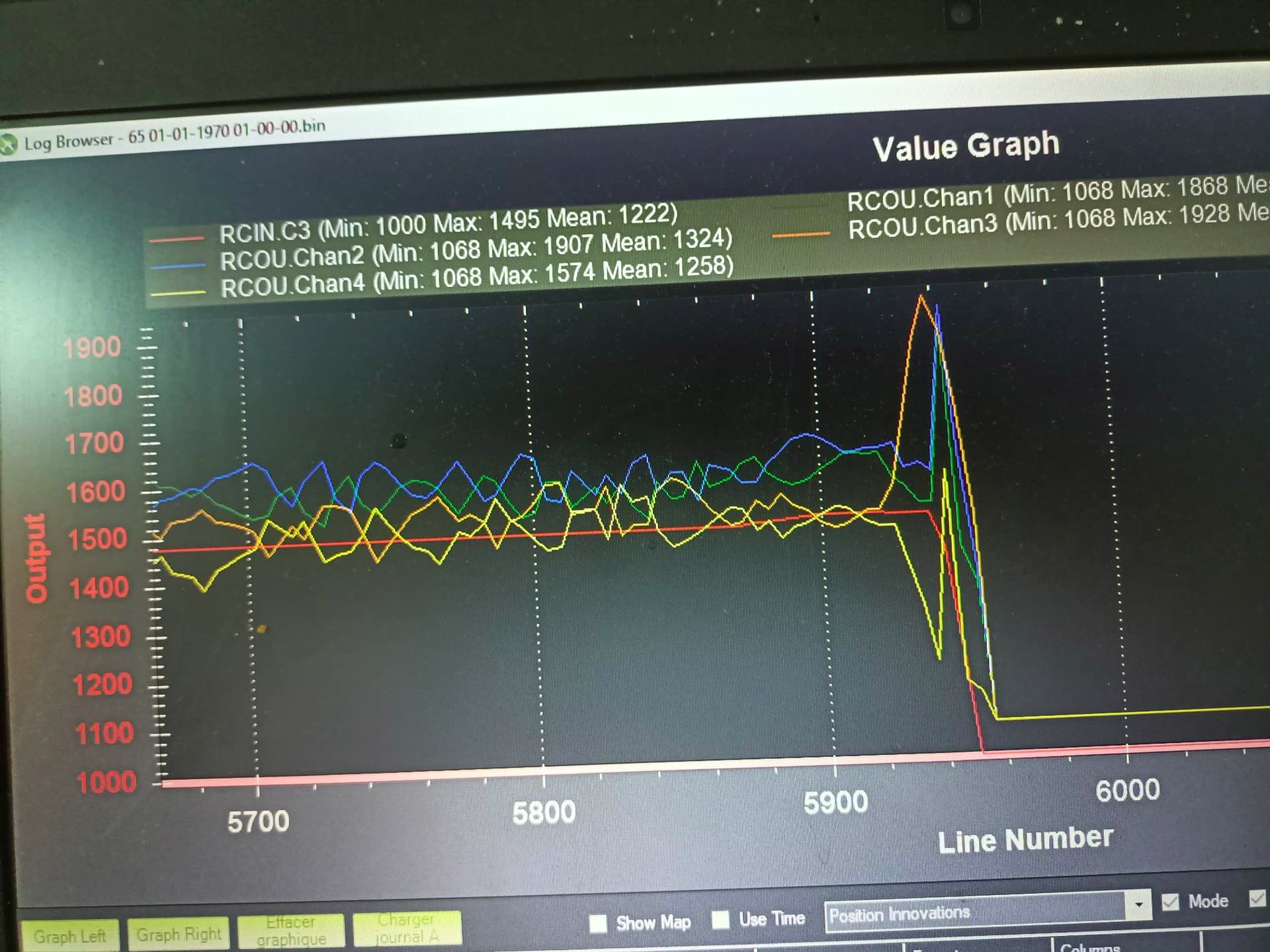
Here is the graph of the last flight that I did (I just increased the throttle) (RCin3 indicates the throttle( the value of throttle that I gave from Tx), RCou1, RCou2, RCou3, and RCou4 indicate the output of APM (motors))
That graph suggests to me you’re having an issue with Motor 3. It’s a bunch of work but if you can re-locate the #3 motor to another position and see if the problem follows it may help to trouble shoot.
I didn’t read all the comments so not sure if this was mentioned, but the big thing to note when running a pixhawk on a DJI airframe is that DJI and APM number their motors differently and if you hook the motors up using the DJI number scheme, you’ll probably get a flip.