Received and tested.
It seems ok indoor
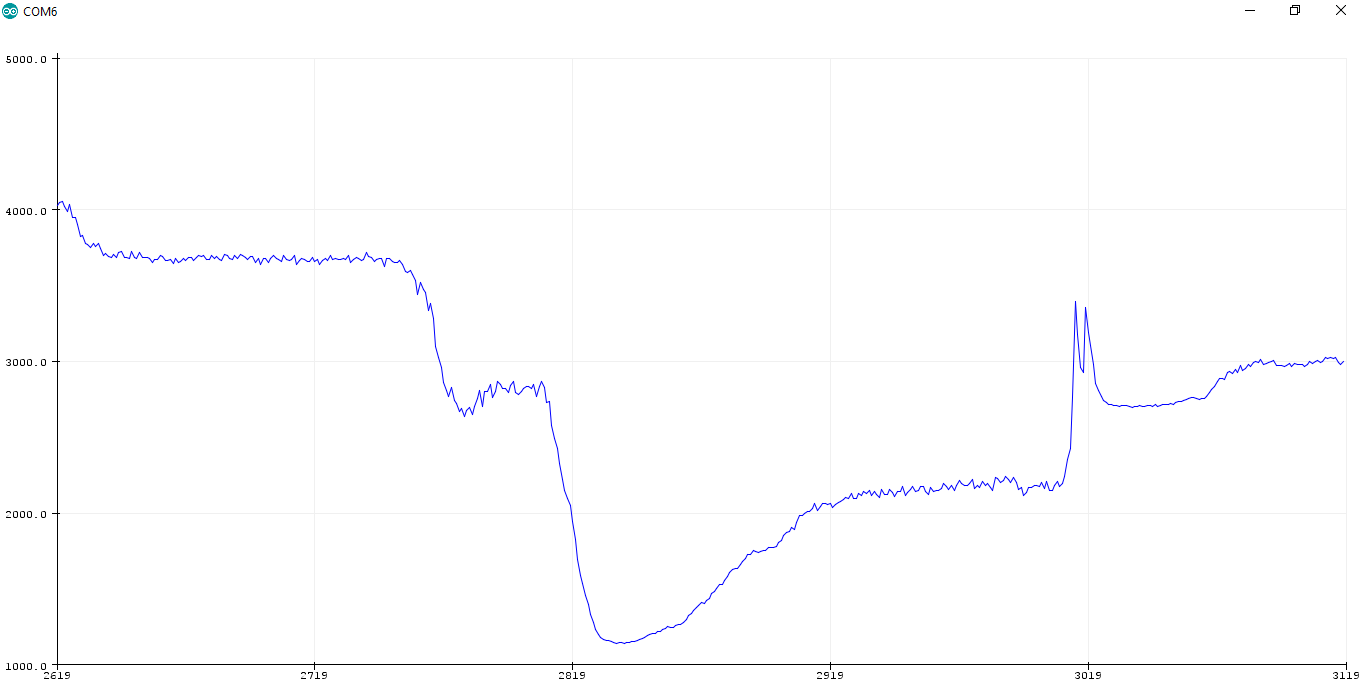
The above test is in my garage looking at different walls, below it aims at a wall an then I open the garage door to let the bright light in.
As you can see , the signal gets ‘‘flooded’’ , so it requires mode tuning, and maybe some IR filtering in order to get used outdoor.

I used this sketch on an Arduino Nano: https://github.com/pololu/vl53l1x-arduino/tree/master/examples/Continuous