Dave isn’t the rangefinder address 16 per the documentation from Benewake.
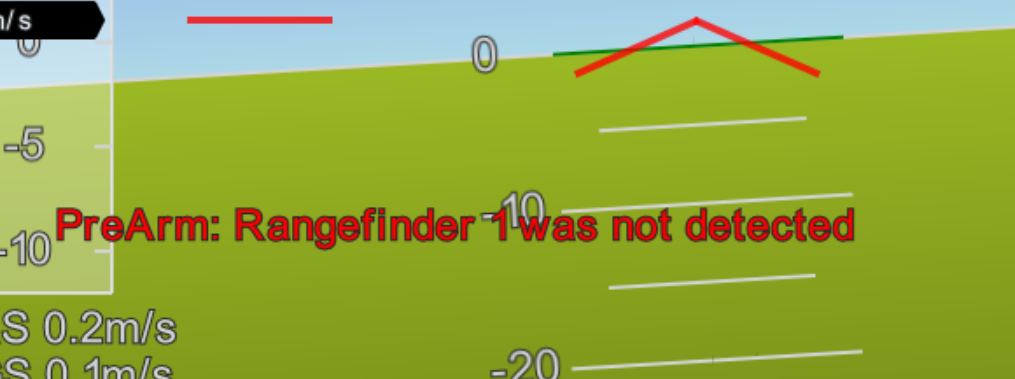
Also is yours an I2C rangefinder…becuase the message your getting is the same as me and those params are identical except for the address.
It’s inline with latest master but with a mod that made it work on my own f405 board, so as @smartdave was having a few issues I built it using the same mod applied. It’s really not much at all.
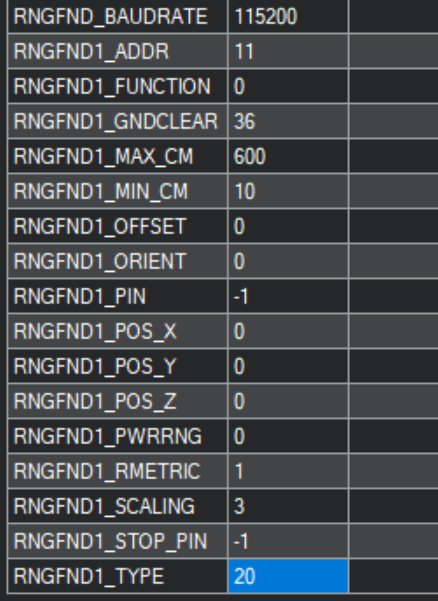
The Benewake TFmini Plus UART mode works fine using the beta universal firmware and the mRo CANNode. You need to disable the GPS by setting GPS_TYPE = 0 and the only other required parameter was RNGFND1_TYPE = 20
The changes are not needed. I think the issue is that @smartdave didn’t disable all the other users of the uart. In the f303-Universal firmware there are several drivers that use the single uart. To use a serial rangefinder you need to at least set GPS_TYPE=0 so that it doesn’t try to use that uart as a GPS. What your patches do is shift to use a different uart, one that the GPS isn’t fighting over.
This is the downside of the universal firmware, it needs to be configured for what device you actually want to use it for. Key params to disable devices are:
GPS_TYPE=0
COMPASS_ENABLE=0
BARO_ENABLE=0
RNGFND1_TYPE=0
ADSB_BAUDRATE=0
that would disable all of the devices, then you should enable just the ones you want, knowing that you can’t have two serial devices as there is just one uart.
I just tested a serial rangefinder with the 1.1.0 beta this morning and it works fine. I just needed to set GPS_TYPE=0 and RNGFND1_TYPE=8 for a LightwareSerial rangefinder.
Cheers, Tridge
I thought of that, but as GPS is by far the most common I decided to enable it, and if I disabled it now it would break some existing users.
I just think we need better wiki docs for this. Any doc volunteers?
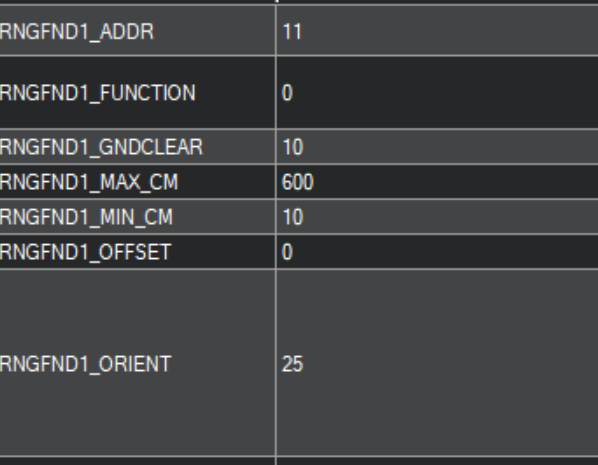
@Matt_C a correction to your first paragraph. You do not set the orientation in the can node, you set it to zero and then set the actual orientation in the flight controller
@tridge I did the UAVCAN docs with @hwurzburg so I don’t mind writing it up. Thanks for taking the time to point out a few things I think that has helped a few guys on here including me. I’ll leave my patch as it stands for my boards as I have 2 to 3 uarts but the good news is @smartdave can go back to the Original FW.