I finally got this to work also, with an inverter built from a circuit diagram. This same inverter also works great with my pixhawk FC. I could not get MAX232 based inverters to work on either FC, probably due to cheap clone MAX232 chips. The uninverted signal fromthe P pad also did not work with the R-XSR receiver. The attached document is in german but the circuits are easy to follow. You can substitute 2N3904 transistors, but be careful as the pinouts are the reverse of a BC547. 2N3904s are more common in the US, BC547s more common in Europe. Any electronics lab probably has both, as does Amazon.
RS232_Inverter.pdf (332.4 KB)
1 Like
In case someone finds this helpful, R9m Slim + with flex firmware,Matek 405 wing and arduplane 4.0
Rx1(Inverted S.Port) ------> Tx1 on F405
Serial 1 baud 57
Serial 1 Options 4
Serial Protocol 4
FYI The latest ArduPilot builds support F.Port with telemetry over one wire… Might be worth using that instead of additional hardware.
i was under the impression Fport was not stable yet
It’s not but I have yet to have any issues with the latest master… Might be worth waiting until it gets into stable though.
Good to Know, i’ve read some people are only getting it to work with the yaapu scripts, do you know if by any chance that mean it only supports passthrough?
I am running a “hacked” XSR and F405 Wing.
T1 - A
R1 - B
s. here
SERIAL1_BAUD 57
SERIAL1_OPTIONS 4
SERIAL1_PROTOCOL 10
SERIAL1_PROTOCOL 4 works as well
SERIAL1_OPTIONS 0 works as well
might sharing your settings and connections, i cant seem to make mine work
I’m using a G-Rx6 with the F405 and the Amazon inverter cable. I’ve tried T6/R6 and T1/R1 but T16 still says ‘No Telemetry’.
Quick question re Inverter: The blue and black wires on the one end - blue is connected to the smart port (in my case, the yellow wire) - does the black (gnd) wire need to be connected? It seems to be common to the black (gnd) on the other side, so I thought it might not be necessary to connect it. Dumb question?
… just tested hooking up the black wire…yes, it’s important! Working now…
Thx!
Hello!
I read the posts above but I’m not sure. If i buy a F405-Wing and use the S.Port Telemetry - do I need the invertercable?
Rx will be an FrSky Rx6R or X4R
Thanks for your answers!
Hi, been Trying to get s. Port telemetry out of my omnibus f4 pro… Copter. 4.0.3, R9 Rx. With a diy rs232 ttl cable.(as shown by Painless360)
Tried diferant chips from diferant vendors butto no avail.
It does work with slim+ on rx1 using halfduplex opt. (protocol 10 & 4 woked)
Cant see what Im doing wrong. Tried phisicaly switching the Rx, tx pins but no sensors are discoversd… (protocol 10 option 0 baud 57)
Any one has some Light to shed here?
Thank you.
Many thanks for the hint!
For me with R9Slim + it ONLY works on Halfduplex (Serial x Options 4)
Cheers Gregor
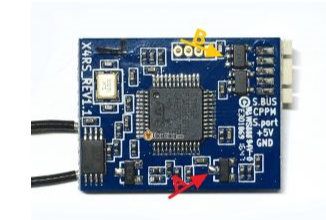
Good news! I just got FrSky SPort Passthrough working with Matek F765-Wing flight computer, Frsky X8R receiver, and FrSky Horus X12S transmitter without any external circuitry. I am using a servo connector to wire the SmartPort pin on the X8R receiver directly to the Tx4 (SERIAL6) pin on the flight computer. No RS232 converter required.
Here are details.
Hardware - SmartPort Connections:
- FrSky SmartPort serial Rx/Tx transceiver receives data from the flight computer and passes it down to the transmitter on the ground. It appears to be a one wire protocol in which both transmit and receive is done on the transmit wire. See note below on special UART serial port settings to make this work without a special external converter board.
- Brown (ground): No connect (ground is provided on the SBUS connector)
- Red (power): No connect (5V power is provided on the SBUS connector)
- Orange (signal, SmartPort Rx/Tx): Tx4 (SERIAL6)
Software - Mission Planner and ArduPlane:
Note: Support for FrSky SPort Passthrough appears to be added very recently to ArduPilot and Mission Planner without requiring a special external converter board (https://ardupilot.org/copter/docs/common-frsky-telemetry.html#common-frsky-configmp). I installed BETA Updates by going to Help>Check for BETA Updates in Mission Planner. (However, I don’t know if installing the Beta is required or not.)
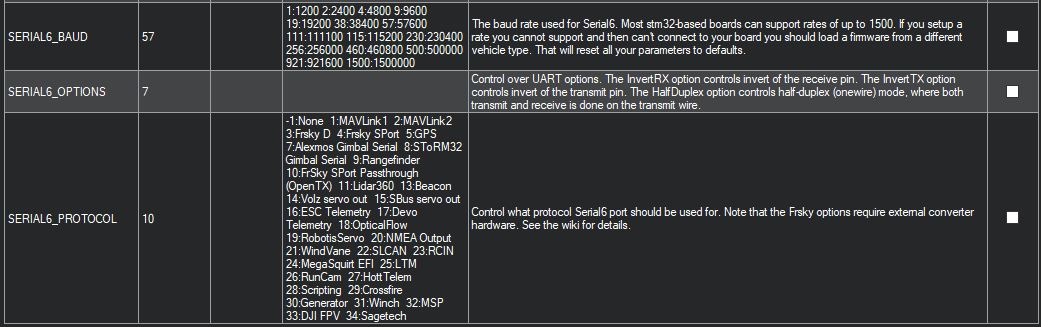
Frsky X8R SmartPort to Tx4: SERIAL6_PROTOCOL=10 (Frsky passthrough for OpenTX)
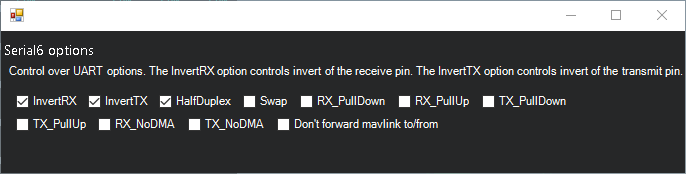
SERIAL6_OPTIONS=7 (InvertRX, InvertTX, HalfDuplex)
SERIAL6_BAUD=57 (57600)
I tried exactly same setup yesterday with the exception of radio and Stable fw 4.0.5. I am using ACCST taranis x9d plus and it didn’t work.
So I am pretty sure it only going to work with future release.
It works as describe by Brian!
I updated my f765 with 4.0.6, reboot and it started yaapu tel
i thought F7 boards like matek f765/h743 use uninverted uarts so no special cable should be necesary?
Arduplane or arducopter?
Arduplane. Its a fixed wing.
Matek F405 Wing - FPORT
No external converter required with R9 Slim plus receiver or with any Frsky receiver, can support inverted Sport/Fport (mostly does).
R9 Slim plus:
RX1 port on the receiver need to be connected/use instead of Sport/Fport. As RX1 is inverted S.port port not the Sport/Fport. Sport/F.port is for F7 flight controller.
Make sure receiver has latest firmware and you have enable the Fport from open tx option.
- Connect receiver RX1 to TX2 (UART 2)on flight controller.
- Config below settings for serial7 ( serial 7 maps to Uart2 as BRD_ALT_config=1)
BRD_ALT_CONFIG =1
SERIAL7_PROTOCOL =23
SERIAL7_OPTIONS= 4 (Half Duplex) RSSI_TYPE=3
Serial7_BUD = 115 ( mine is works perfectly with 115, try 57)
Enjoy the yappu telemetry on your transmitter. Dont forget to delete all sensors and discover again under openTX system settings.
On Matek F405 wing, I am using UART2 for R9 receiver. Does these parameters ok?
Serial2_Protocol = 10
Serial6_option = 7
Baud rate = 57
RSSI_Type =3
RC_option = 8
Running 4.1.2 Plane FW
Yaapu 1.9.5-dev