been working on this for a while. running ver 3.6.12 this copter flys great for about 9 min then becomes unstable and just crashes. im running a 5400 mah battery. the battery and current output look ok in the logs. Does anyone with a bit more experience that may see something I am missing in the logs they are attached. I was running a auto tune this flight had to do a rtl as it got a little far away then became unstable about 30 ft from landing and crashed pixhawk logs
would that be the high spots in orange? im new to trying to review these logs
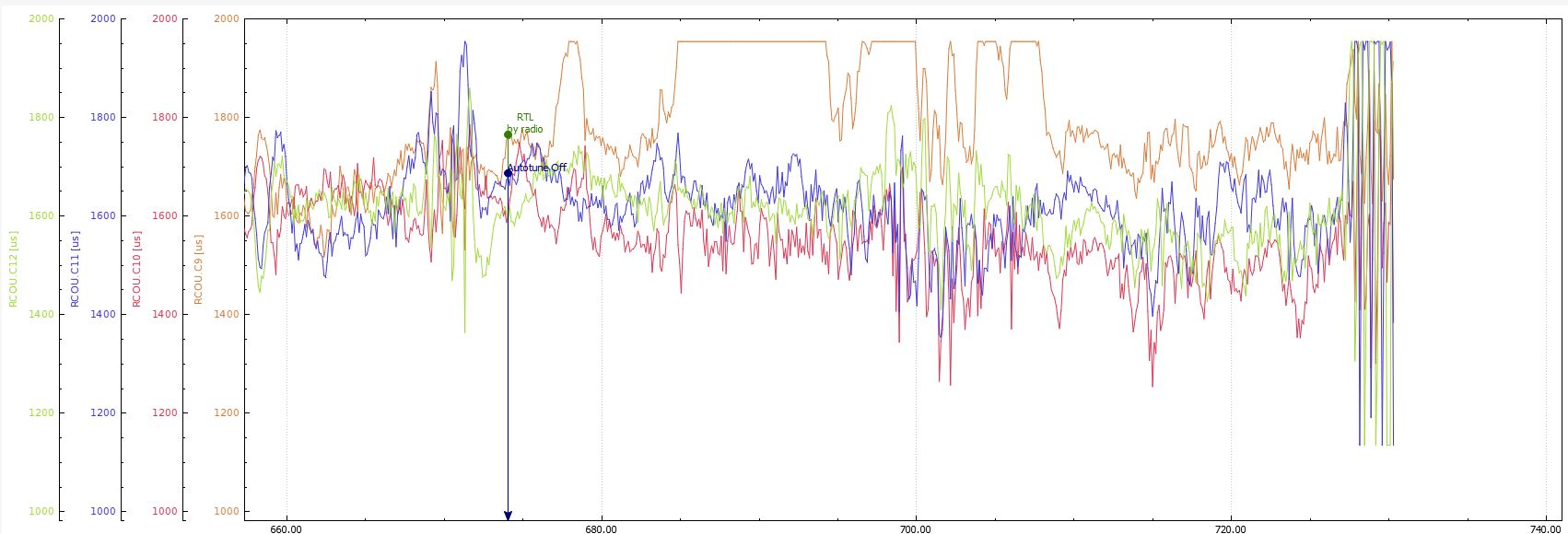
if im reading that correctly im it basically has max power out but maybe the motor isn’t responding correct
Chan 9 which would be motor 1. It’s max commanded signal out. If there is a loss of thrust it will be commanded higher to compensate until it’s at max.
BTW-I wouldn’t suggest using Dshot 600. Set it to 150. It also looks like you have default parameters. Use this tuning guide and set accordingly as a baseline:
https://ardupilot.org/copter/docs/tuning-process-instructions.html
Is that DShot ? Looks like plain PWM to me…
It’s only scaled that way in the log. MOT_PWM_TYPE is set to Dshot 600, that’s why he’s using the Aux outputs.
No, it’s not. It’s PWM.
BlHeli ESCs auto-configure themselves on detected input.
You are right. He is running the Nuttx version of 3.6.12 so Dshot is not supported. So setting the MOT_PWM_TYPE to Dshot as he has done is futile.
… and being BlHeli, they have a feature called thermal throttling, and autopilots don’t like it. If it didn’t fell tumbling right out of the sky, like any decent quadcopter would do after losing a motor, it’s an overheat/throttle event. It happened to me after roaring around at max throttle to impress a trainee who happened to be a blonde, blue-eyed female  Had to let it drift in alt-hold for a bit, while it was yawing uncontrollably. After twenty seconds or so, it stopped then behaved absolutely normal for the rest of the day. Log showed both CCW motors maxed out for the duraton of nine yaw revolutions.
Had to let it drift in alt-hold for a bit, while it was yawing uncontrollably. After twenty seconds or so, it stopped then behaved absolutely normal for the rest of the day. Log showed both CCW motors maxed out for the duraton of nine yaw revolutions.
I was using the aux outputs because i thought i read that was the only way Dshot was supported. Is there something i can do to use dshot at this point. Im not sure if it would have been thermal throttling I wasn’t pushing the motors hard that crash was actually during a rtl and it was descending to land so the motors were not pulling a huge amount of current. it has happened multiple times on review of the logs seems the same motor is cutting out on other flights also. I intend to check all the solder connections tonight and swap the motor to a different output to see if the problem replicates itself on a test or moves to a different spot. then I can rule out the motor at least. I intended to tune it also just haven’t been able to keep it flying long enough 
1st update to 4.0.0 Chibios because the Nuttx version of firmware you are running doesn’t support Dshot at all. Then, as I suggested, start out by setting the MOT_PWM_TYPE to 150 not 600. You probably can’t take any advantage of 600 on your craft anyway.
The notch filter can have the side effect of keeping the motors cooler. So you might want to give that a try.
Is the 4.0.0 version mission planer luts nuttx or chibios. im seing 2 different ways to update the firmware and not sure which is what version?
I dialog box asks if you want Chibios when installing and after updating look on the Messages screen after connecting and it will be displayed .