this is the first time I am having this problem, I gave survey mission to the plane, plane doesn’t follow survey points, flies like a drunk plane. weather was good, light wind. there is no problem on altitude.
I am just thinking, this maybe defected gps module?
looks like it was not meeting its desired angles well, usually this is just a bad tune but I guess you have flow it before? Maybe you CG was not the same as usual? or a servo going bad or something.
I have flowen it 6-7 times withotu problem, this problem, started recently, CG is the same, servos are also ok, Plane changes direction, and going to some random locations, and altitude is stable. I thinking some defect on GPS module or on Cube something.
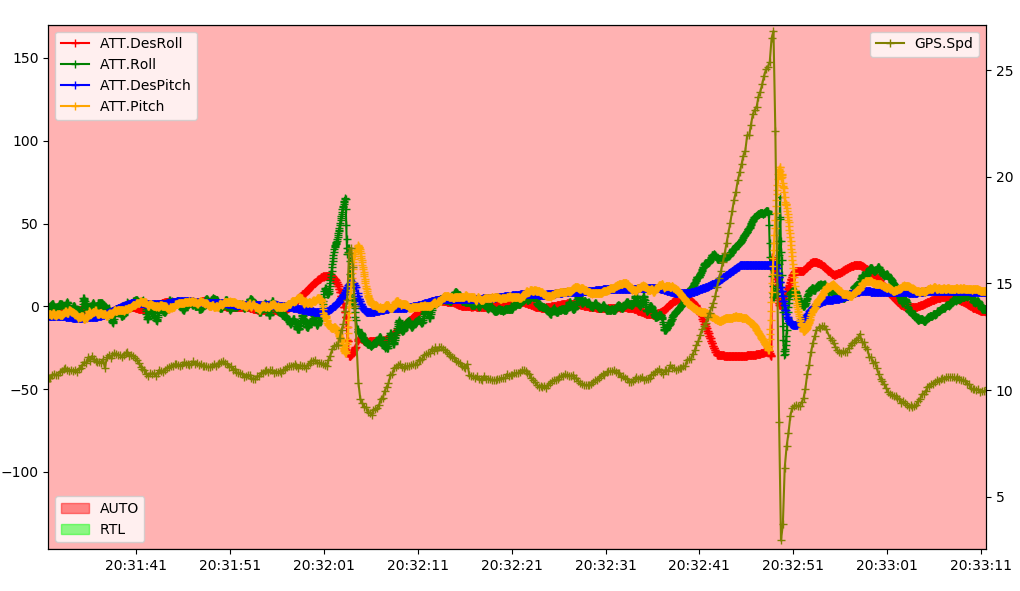
The GPS speed in that graph is also totally crazy.
Have you edited these logs? If not, how are you managing to takeoff from 250m below ground level?
Cheers, Tridge
It looks like plot.dron.ee applied a log obfuscation. Thanks for the real logs.
It shows there is something seriously wrong with the aircraft. Here is an excerpt from one of the “normal” flights, log 30.bin.
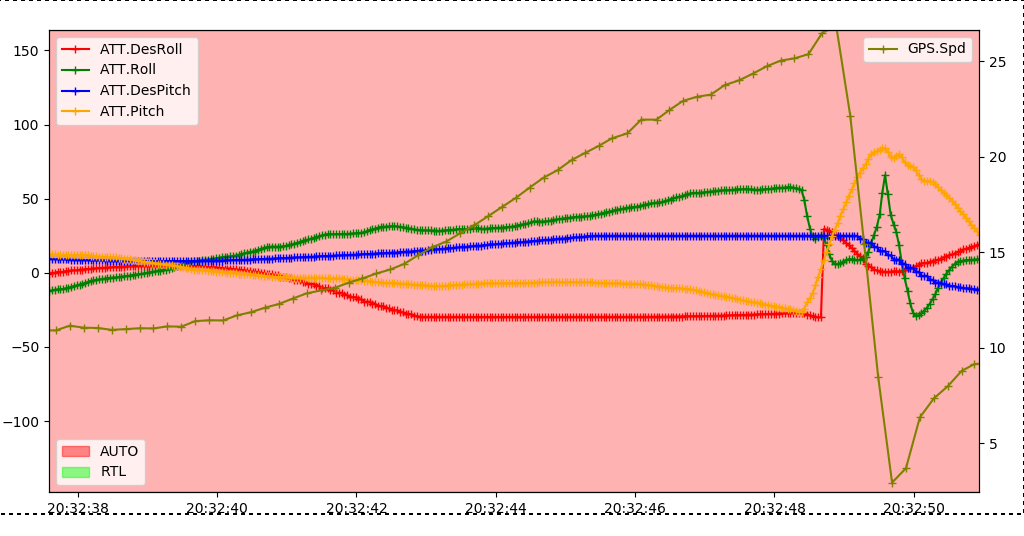
while cruising along at about 11m/s the nose slowly dropped, and it started rolling right
it gained speed till doing over 25m/s
it ended up 26 degrees nose down, and 60 degrees rolled right when it wanted to be 25 degrees nose up and and 27 degrees rolled left
suddenly it went nose up, getting to 83 degrees nose up (thats almost vertical) and stalled
it then recovered
I think you were lucky not to lose the aircraft in that “normal” flight.
The controls ArduPilot were putting in all look normal, so I think there is something physically wrong with this aircraft. I can’t tell you exactly what is wrong, but I recommend going over all aspects of the aircraft very carefully. Especially look at flex in control surfaces, wing flex, good servo movement in MANUAL, stripped servo gears etc.
Cheers, Tridge
I had a similar experience and it turned out to be a short circuit in one of the servos. That caused the servo voltage to drop which lead to the irratic behavior.
Thank you very much, i found that some times one of my servo doesnt responds to rc signal. I have changed the servos, now looks all ok. I will fly today to see if the problem is gone. I appreciated.