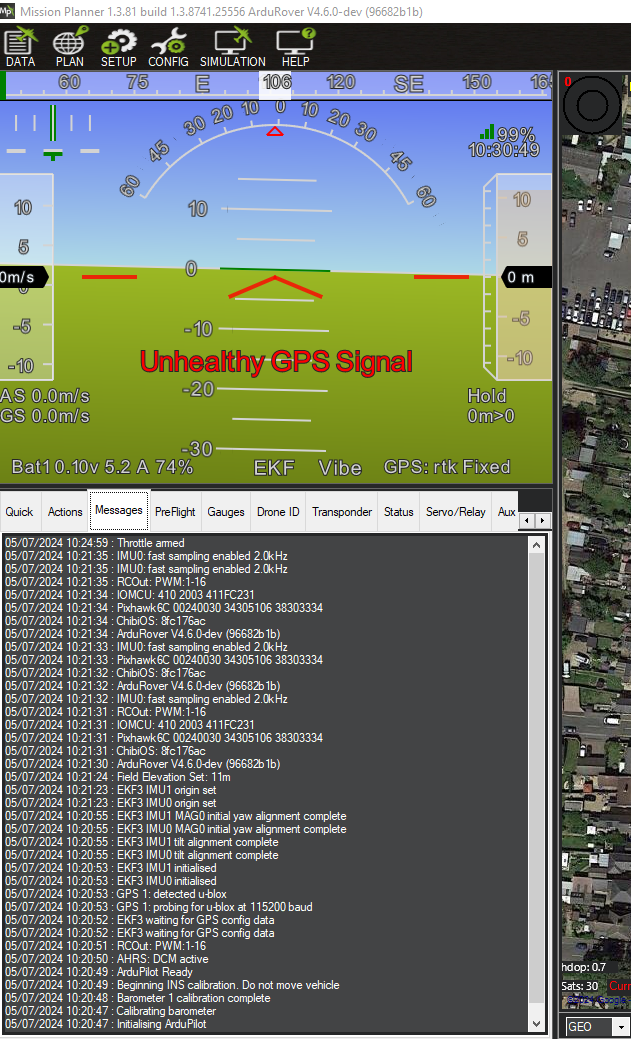
Hi, any pointers in trying to resolve the annoying Unhealthy GPS Signal warning?
My setup consists of the following:
Pixhawk 6C Mini
Ublox F9P GPS
Sats 30 Hdop 0.7
rtk Fixed status.
The F9P is powered from an external source rather than the FC.
Installed into a boat which performs 100% as expected and does not cause any issues other than being annoying.
The update rate of the GNSS receiver is lower than 5Hz hence the warning.
To solve it limit the number of satellite constellations so that it can update faster.
You would not have had this issue if you had used the ArduPilot methodic configurator software and followed it’s easy instructions.
Thanks for your valued comments. I’ll look into your suggestions.
Hello
I have a problem where I get NO GPS on mission planner. I have configured everything in Ublox and sent it to the DP0601. I have swapped the TX RX since the pins are inverted from Pixhawk 6C to DP0601. I use GPS2 port, but still no action. Do you have any solution to my problem?
Use GPS port 1
Or Use GPS port 2 but configure it correctly by setting SERIAL3_PROTOCOL to -1 and keeping all other settings as if it was connected to port 1
Could you make a screen shot of the GPS settings? What settings regarding port 1?
Why did you swap pins? Autopilot TX needs to connect to module RX, and vice versa.
If you are using the port labeled GPS2, set SERIAL3_PROTOCOL = -1
All other serial and GPS settings can remain at their defaults.
Whatever you configured in “uBlox” was unnecessary and likely detrimental. If you mean u-Center, you don’t need that software.
I swapped the pins inside mission planner through serial 4 option (swap txrx). Should I rather physically switch them?
I will try to disable the GPS1 (serial 3) port.
What I did in uBlox or u-center, is that I downloaded the rover parameters and enabled the GGA to send coordinates through uart1, and configured uart1. I also enabled RTK through ntrip client.
I don’t think you should swap any pins at all!
And it’s still unclear what you’re trying to do in u-Center, but I suspect it’s not helping. The settings you changed are incorrect and should be overwritten anyway by ArduPilot’s auto configuration. How do you intend to transmit RTCM3?
If you disabled UBX messages, also wrong. Revert to default in u-Center and close it.
This also has nothing to do with the old topic you resurrected. Next time just start a new one.