i have problem in analyzing datalog in mission planner. Yesterday my quadcopter flew and crashed. My guess is that the phase on the motor suddenly cut off (because it was found that during a crash, the phase cable for the motor was detached from the esc). But also in the middle of the flight the GPS status experienced “no fix”, but I flew using althold mode, so I don’t think it’s a problem.
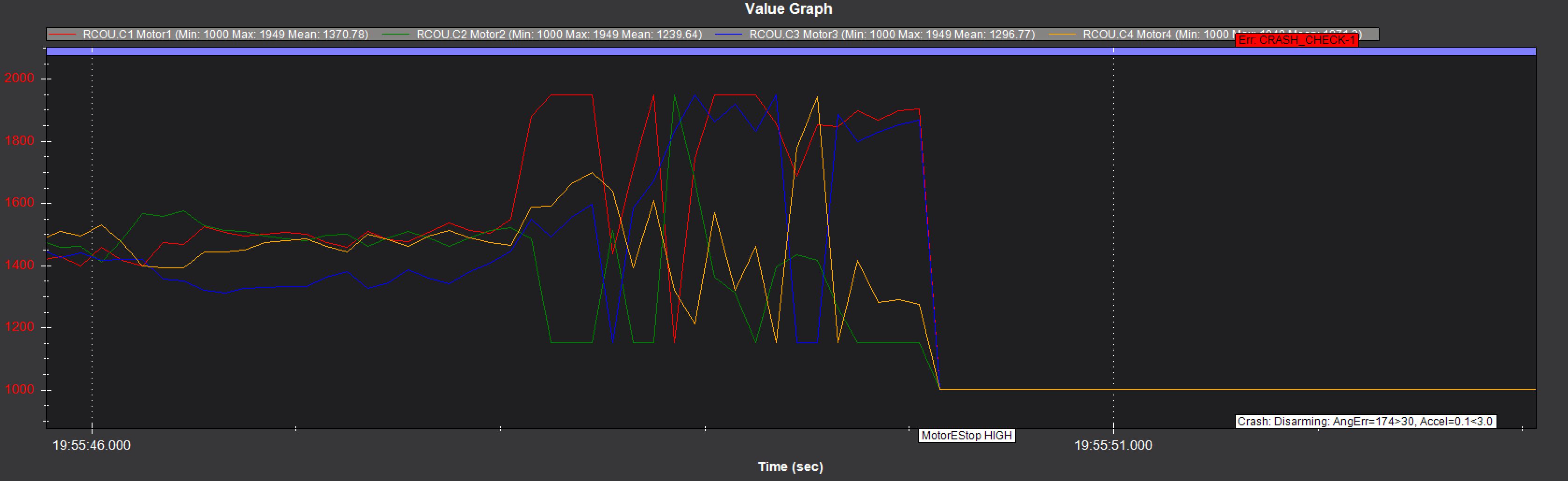
After I opened the RCOU datalog, I was confused about reading it, I suspect that it is motor 2 or 3 that is out of control, but the motor that is out of phase is motor 1.
I ask for help for a solution. I have included the datalog.
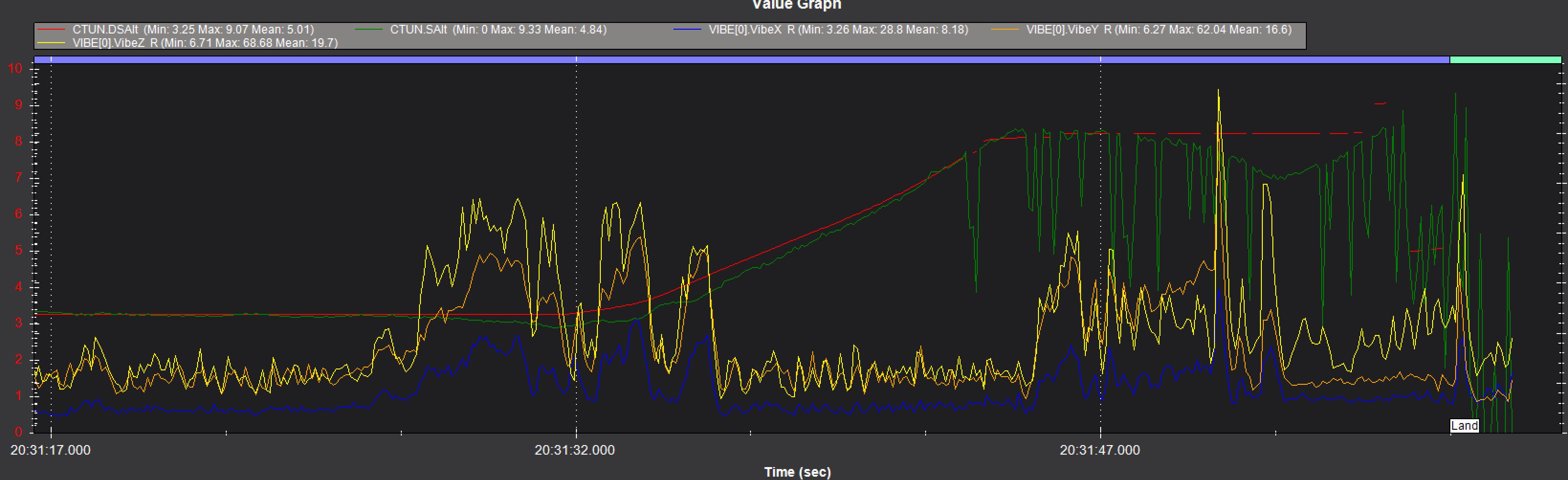
Looks to me like there was a high vibration event, the motor coming lose perhaps, which could cause the altitude increase. The rangefinder was working until it got to ~7m.
how can hight vibration event happen?
We used 4 motors, where one of the motors was a new motor, we put on it with a banana socket but didn’t cut the phase cable (so the phase cable was still long). Meanwhile, for the other 3 motors, I cut the phase cables short. Does it have any effect?