I have the problem of quadrotor crashing a second time. However, this second crash was very serious, because the motor 2 came off while the ride was in the air, causing the ride to spin out of control and finally fell down 9 meters high. Before experiencing the crash, the quadrotor suddenly rose itself from a height of 3 to 9 meters, even though the pilot had lowered the throttle. Our assumption is that after viewing through the telemetry log, the rangefinder reads 3 meters while the altitude reads 6 meters. After that then the motor 2 is off.
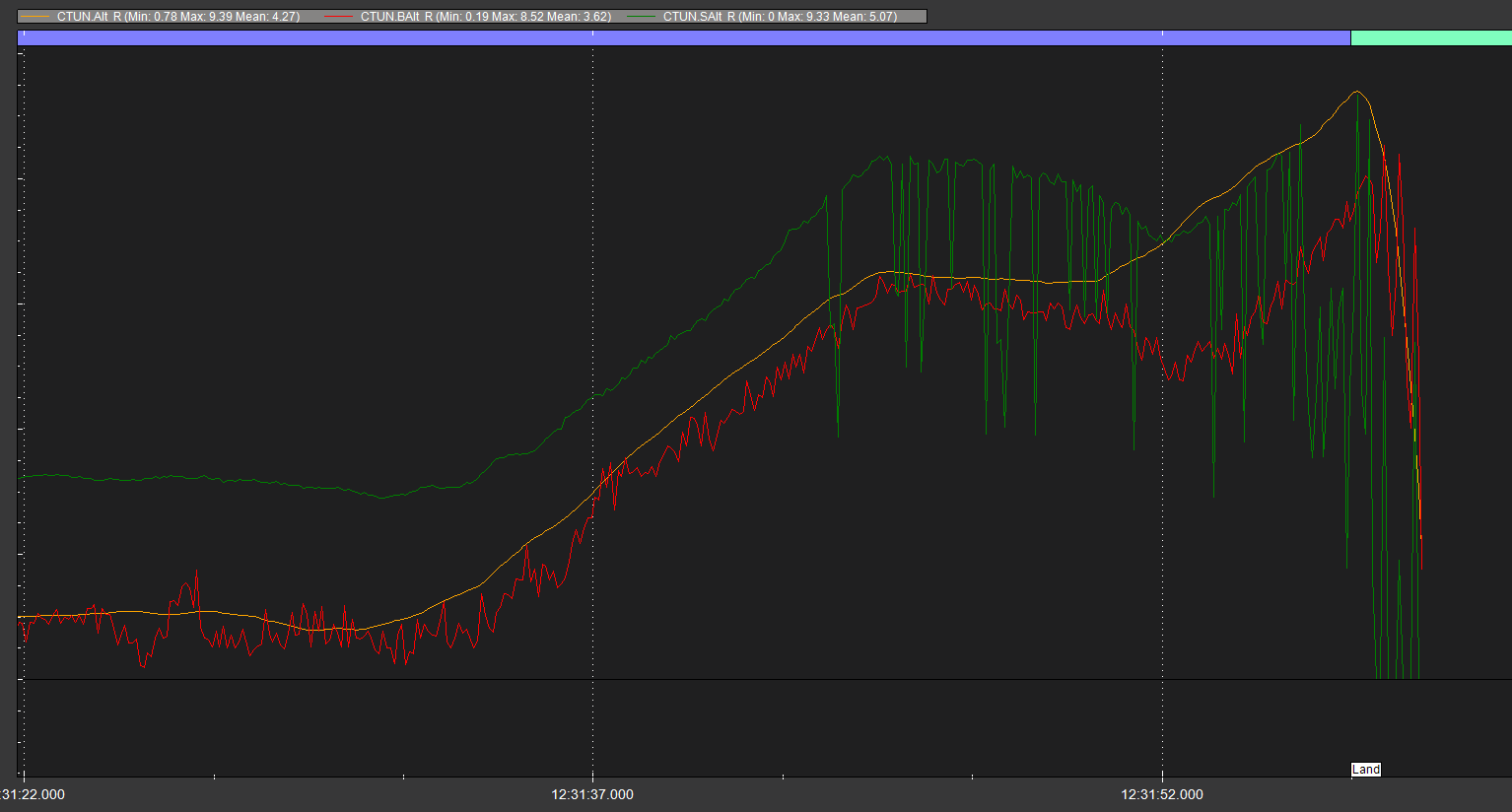
Altitude (both calculated and barometer altitude) roughly follows pilot RC input as expected.
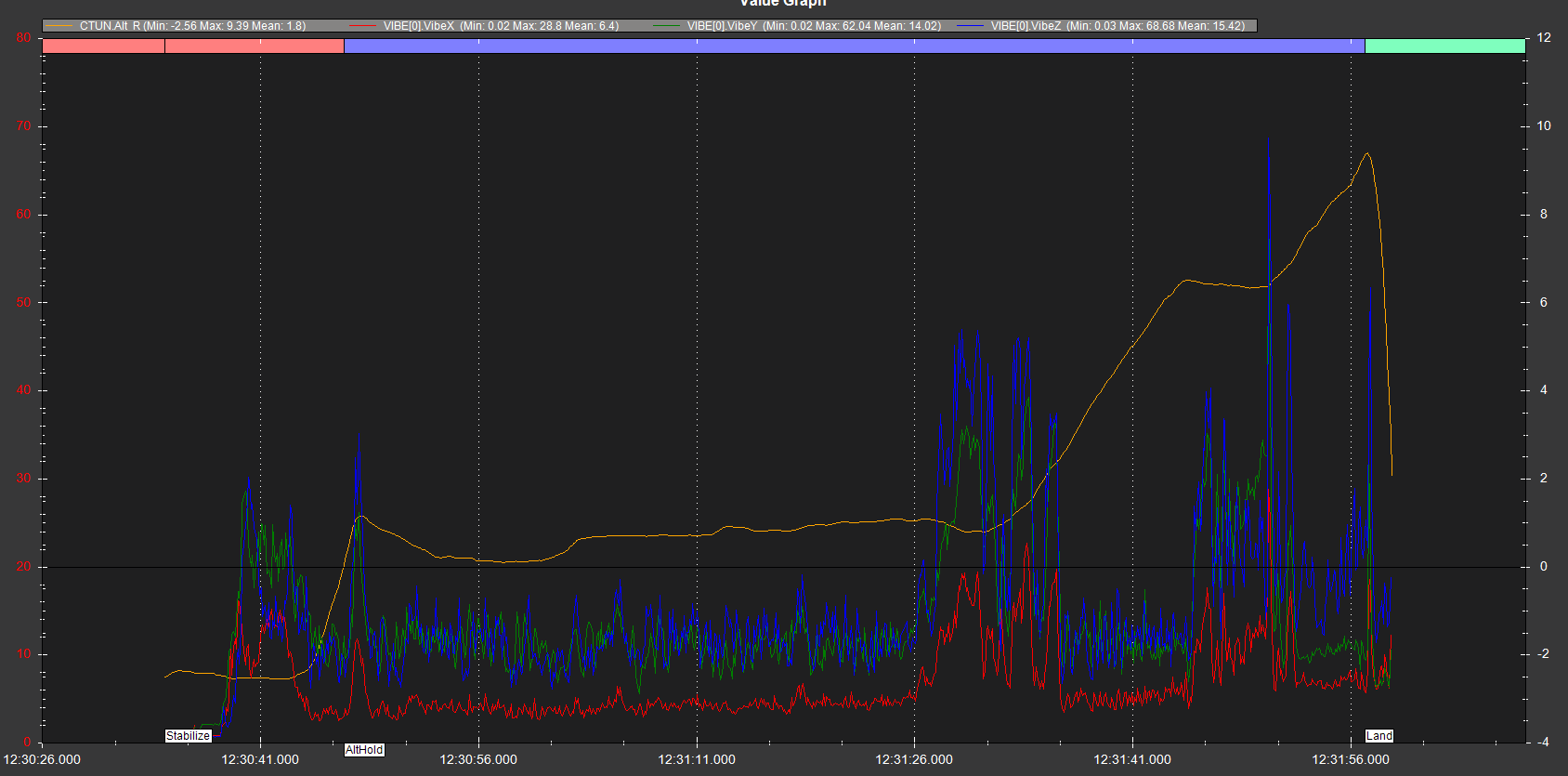
The problem is vibrations about 60% of the way through the flight, probably when the motor is coming loose. Z axis vibrations go over 30 and the copter starts rising - the effect of z axis vibrations is the copter thinks it is falling so motor outputs are increased.
You’ll see every time the Z axis vibrations went over 20 the copter rose - until right at the end when the motor must have come off.
While you fix everything from the crash you should update to latest stable firmware. Make sure you pick Pixhawk1, which I think you did in the past too.
Unfortunately that Pixhawk seems like it might only have one IMU. You can check in MissionPlanner HWID (upload a screenshot here). You should probably set this anyway:
EK3_IMU_MASK,3
If it does only have one IMU then consider the purpose and reliability of this copter versus the cost of a better flight controller.
And before the next test flight, connect to MissionPlanner / Mandatory / Initial Parameters
Put in your prop size and battery cell count, also select “Suggested settings” and then accept everything it offers.
Plus set these:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
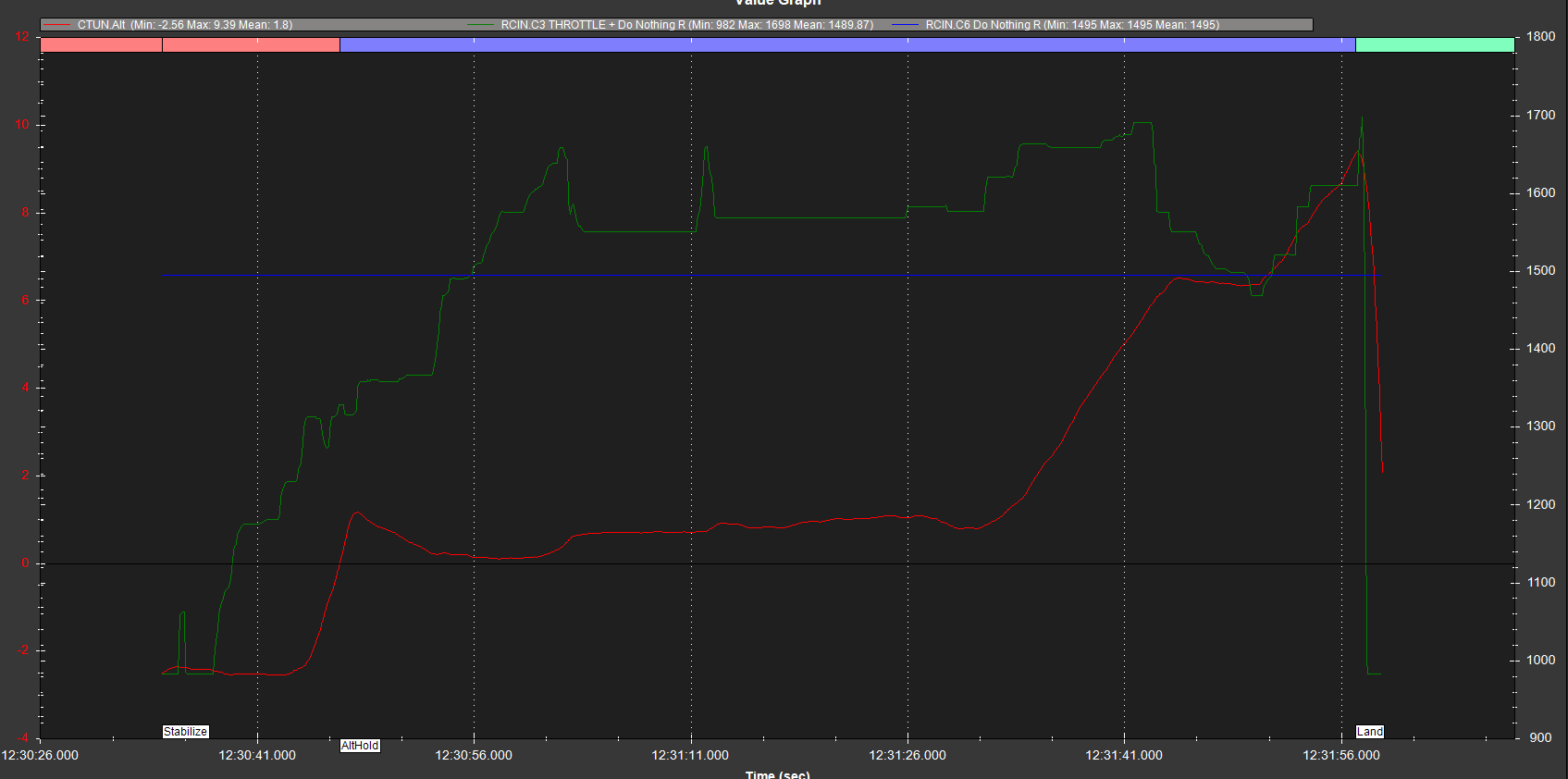
Also here’s the altitude/throttle graph I meant to add before.
I added an unused RC channel (blue) to give the straight line across at 1500 PWM as a reference for approximately where centre/hover throttle should be.