Hi @Alberto_Ds, really no clue on this receiver, seems like it can be flashed with frsky XSR firmware to get sport/fport working but I don’t have one so can’t really advise.
Perhaps this on rcgroups might help you?
Hi Alex,
Thanks for the reply! But shouldn’t the R1 + already work with its firmware without the need for updates?
…is sport working at all, even without my script?
asking because I read on the rcgroups thread that it comes with fport firmware as default.
If sport is working (you get sensors by selecting SERIAL_PROTOCOL=4) or by attaching a voltage sensor like FLVSS than my script should work just fine provided the inverter/converter is known to work as well
1 Like
I don’t think so … unfortunately in the telemetry screen (radiomaster open tx 2.3.9) I read only 4 values. I tried with SERIAL_PROTOCOL = 4 and also SERIAL_PROTOCOL = 10, but it doesn’t seem to change anything. Do I need to use an inverter with the omnibus F4 nano v6.0?
Yes, you need an inverter or an iunnverted pad on the rx, f4 boards can only do half duplex
1 Like
thanks, I have to look if there is a pad on the RX. I think that’s the problem 
Hello Alex @yaapu
Thanks for the magnificent work, I had stopped using my Taranis X9D and use mainly the TX16S due to the great colorful telemetry screen.
Is there a way to add RPM data into the screen ?
I fly helicopters and the RPM is part of the data inside the pixhawk AP.
checked your LUA that has great comment. I might add it myself, but could not figure if the RPM is telemetered on the passthrough.
Regards
Zvika
Hello @hdrme
Check your receiver, it should be transmitting S-Port data and not F-Port (i had this issue holding me for more than a week… till i found that)
I apparently had is right and didn’t recognize it. What was happening is that I expected to see values showing on the model telemetry page before it would work. As a result, Option 4 was doing that, but then not populating the widget. Going back to Option 10 and trying once again it’s now working. It works fine, but would love a widget more suited to rovers and boats…no artificial horizon taking up space, for example. The maps function is working and that could be very useful.
Hi,
I’m really open to suggestions for rover and boats, try to draw something and do a proposal, just keep in mind that in lua we can’t rotate and/or scale images, all we can draw are lines and rectangles, we can display images and “animate” by using multiple images.
And unfortunately we do not have telemetry for wind, neither real or apparent
cheers,
Alex
Alex, in thinking about it for my Rover and Boat, I’d like to see a customizable grid sized to be easy to read with Mode, Speed, Heading, Distance from home, Distance to next Waypoint, # of Satellites, Battery voltage, RSS, distance to an obstacle in front, and home direction (arrow). These are not in order. A small artificial horizon could be beneficial for a boat to show if it’s listing left/right (taking on water) and for a land rover to easily see if you’re on your side or upside down or maybe stuck in a ditch. A couple of lines of messages at the bottom for current messages could be helpful, but not at the expense of the other info…at least that’s the way I see it. After reading what I just asked for, there really wouldn’t be room for messages…these are fine the way you have them now on another screen.
Hi all,
I created a thread dedicated to passthrough over crossfire support for my scripts ![]()
cheers,
Alex
2 Likes
Hello,
I have a question about the custom sensors. I have one LW20 sensor connect via serial to the pixhawk. And than via teensy 3.2 and mav2pass the telemetry.
And I would like to put the sensor forward on a gimbal and have the range on the yaapu telemetry screen. Is this possible?
regards
Christian
Hi @Christian81 that would not be possible without customizing the MavToPT code to inject either custom frsky sensors or custom passthrough telemetry packets
Hi everybody,
I’m adding support for google maps to my Widget, maps will be downloaded using MissionPlanner’s prefetcher tool from the mission planning screen, I was really missing google maps 
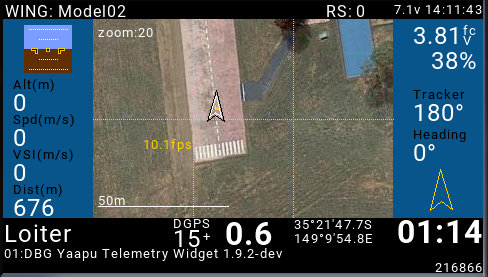
The widget will be compatible with the older GMapCacther format, switching to google maps will require selecting the new map provider from the config menu.
I will change the way the 3 pos zoom toggle switch works:
- up keep increasing the zoom level once per second
- mid do nothing
- low keep decreasing the zoom level once per second
this way it will be possible to take advantage of all zoom levels.
cheers,
Alex
4 Likes
Thanks Alex, very useful!
1 Like
Does that mean we will be able to use Mission Planner to download maps now?
Yes, next version will allow to use missionplanner (or gmapcacther) to download maps
Alex, when the script will be touchscreen ready?
Thanks!
ah  …when the radios and OpenTX will be touchscreen ready
…when the radios and OpenTX will be touchscreen ready
Jokes apart as soon as OpenTX will add official touchscreen support I will try to incorporate it in my widgets, OpenTX 2.4 will also allow to send keyboard events to widgets so I will no longer need an external config tool, and navigation from page to page will be simpler.
I played a bit with the NV14 simulator with touchscreen enabled and it worked fine even though touch screen requires looking at the screen to be effective while switches and buttons allow for “navigation by memory”, a mix of the two approaches is indeed the perfect solution!
1 Like