I usually flag both options, but my script only requires Lua checked
And why then on the memory card of the control panel to record luac files? Or it is not necessary.
I’m not sure I understand your question but anyway you can flag the luac option it will not do any harm.
Thank you very much Alex. I will try now. Firmware for the receiver and transmitter normal or flex have meaning for the work of telemetry?
normal and flex both have telemetry, flex has power control also for EU 868Mhz.
Flex requires OpenTX 2.2.3
Edit: removed note about f.port, does not apply to R9 line 
Installed on the openTX 2.2.3 remot control. The R9M transmitter module and the R9 Slim + receiver updated to the latest firmware FW_Ranger9_TX_20190117 and FW_Ranger9_RX_20190201, respectively. The problem did not disappear. Also, from the receiver R9 Slim + 2 messages come to the remot control and that’s it. But it is necessary to disconnect from the receiver and turn on the power for one second messages begin to arrive and the telemetry starts to work normally. I took the receiver from a friend, the same problem with it. But there are no problems with X8R and XSR receivers, they work flawlessly and transmit telemetry perfectly. What else can you do to fix the problem. Maybe some kind of log file with the information you send?
I’m afraid there’s not much I can do. Your problem seems related to your specific R9 setup.
I do fly an R9M + R9 mini with success, I’m really out of ideas but if you figure it out please come back to report what it was, sorry ![]()
Hi Alex,
Thanks for the support for to independent batteries with extended voltage range (above 51.2V).
Fantastic script - well done!!!
Where can I find a full table of all sensors available for the extra screen?
One more issue, I was thinking to replace the Taranis’s internal RF module with an external longer range one.
However, when connecting directly to Taranis S.PORT pin (within the external RF bay) telemetry data is available only while Taranis is link to the X8R receiver. See the thread https://github.com/ArduPilot/ardupilot/issues/11084#issuecomment-482423116
To make a long story short, it seems that a minor change within the ardupilot FrSky passthrough code will solve the issue, but I’ve some difficulties to compile it 
Hi, there’s no such thing as a table of extra sensors, the sensor you can view in the custom screen version of my script are sensors that you must already have as frsky telemetry sensors in your radio’s telemetry page.
These are not provided by my script but rather by real physical sensors chained on the s.port bus.
I agree with the answers you had on github, since you’re willing to dedicate a downlink to a serial one-way link for passthrough telemetry I’d rather bring a one way mavlink stream to the ground and convert it there to passthrough by using the mavlinkToPassthru firmware.
Keep in mind that to respect frsky timing the link would have to be at 57600 bauds whereas if you use mavlink you can lower the serial speed down to whatever you feel resonable to respect your latency and above all range requirements!
Hi Alex. Having spent several days in experiments, I came to an unequivocal conclusion. Using the P9M transmitter and the P9 Slim + telemetry receiver, it is possible to pause for 15 seconds after turning on the transmitter and then turn on the receiver. I did not manage to get other successful options to work with telemetry.
Hi all,
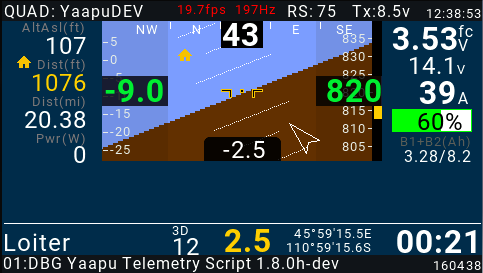
this is a preview of the upcoming new Horus layout
Alex
2 Likes
pretty much everything is working, you can also hear the message parsing engine speaking out “takeoff complete” and “reached waypoint”
Given the season, it’s only missing a couple of Easter eggs 

1 Like
Hi all,
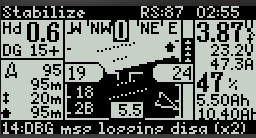
I expect this to be the last public test release, this is version 1.8.0-rc1 for Taranis X9D, QX7 and X-Lite
Note 1: OpenTX 2.2.3 is recommended for it frees some extra memory for lua scripts
Note 2: This version requires the luac option checked in OpenTX settings
Layout changes
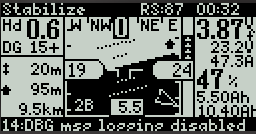
hspeed is on the left, altitude on the right, vsi is on the bottom,
total flown distance is shown below home distance
variometer is on the right
Extra screen
Note: In order to prevent unwanted switch to the extra screen I changed the way to reach it.
From the main screen press [PLUS] to display messages, from the messages screen press [ENTER] to enter the extra screen.
From the extra screen press [EXIT] to go back to the main screen or press [PLUS] to show messages and press [ENTER] to enter main screen,
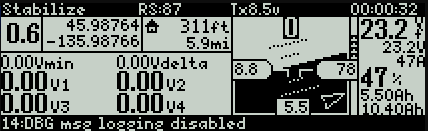
Here up to 6 sensors can be defined by editing the per model lua configuration (example included in the /MODELS/yaapu folder)
This was designed with gas suite users in mind, it’s possible to define multipliers, labels, warning and critical levels in the conf file.
There’s also the option to define lookup tables, when a sensor value is found in the lookup table the script shows that value instead of the sensor one.
When the script is in “show min/max” mode by short pressing [MENU] the custom sensor panel will show min or max values depending on the “min or max tracking” option defined in the lua configuration file.
@ChrisOlson briefly explains this new feature in his video
Support for @Eric_Stockenstrom “Plus” firmware,
The plus version sends extra info for
- waypoints
- airspeed
- throttle
the custom left panel can be enabled by selecting “m2f” in the script conf menu
Support for new battery configurations: serial and independent
- independent dual batteries with cellcount override for 1st and 2nd battery (select “other” in batt config menu)
- batteries with voltage higer than 51.1V (requires to select 12s override in config menu)
- chained FLVSS as serial battery config (select “ser” in batt config menu)
…and
- voice playback of selected mavlink messages
- script reset is now possible without power cycling the radio by pressing long [ENT] + flight reset, motors should not be armed and the flight timer should not be 00:00
- fix to skip flight mode vocal announcement for very quick flight mode changes, like flipping a switch from pos 1 to pos 3
- haptic feedback, has to be enabled from the menu
- more options to silence the incoming message beep
- support for PX4 flight modes when used with Eric’s mavlinkToPassthru firmware (has to enabled from the config menu)
as always feedback is very welcome,
cheers,
Alex
Alex, I love watching individual cell voltage sag under stress. I’m also thinking about upgrading my beat-up first-batch Taranis to a Horus. That bright screen beats squinting and helps with situational awareness for a guy considering his first prescription glasses
Is the “2-nd screen” coming to Horus ? 
Hi,
… yes custom sensors will be available with two possible layouts ![]()
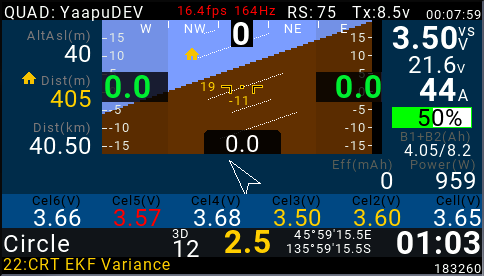
EDIT: don’t mind the cell colors, warning and critical levels where not set!
1 Like
What do you think of the Jumper? I worry they have priced this so low that they have not left enough margin for support of their OpenTX fork. FrSky’s support of OpenTX seems to have left them very vulnerable to this sort of ultra aggressive competition. I guess it is good if they raise their game but I just do not see them putting much into OpenTx if another company will just fold it into their fork. I wonder where this goes – not wanting to derail this thread. And I just received a Horus X10S!
Hi Marc,
you’ll love the Horus
Personally, I’d not worry much about Jumper, they have forked a mature project and maintenance is going to be minimal.
How good this is going to be for the OpenTX project future is another question and I really don’t have an answer,
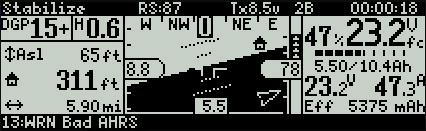
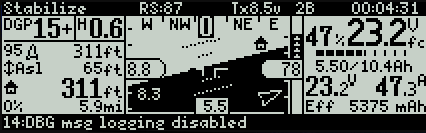
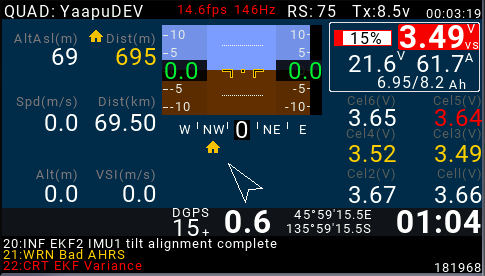
testing some minor cosmetic changes:
- extended status bar with last 4 messages
- roll and pitch on the cockpit
- colored message history on black background with telemetry bar on the right