i am using The Cube 2.1 Autopilot on 3.9.0 plane
for a quick test try to disable logging by setting LOG_BITMASK=0
http://ardupilot.org/copter/docs/parameters.html#log-bitmask-log-bitmask
if it works than it’s the sd card
no change
LOG_BITMASK=0 but your write there is no flight timer
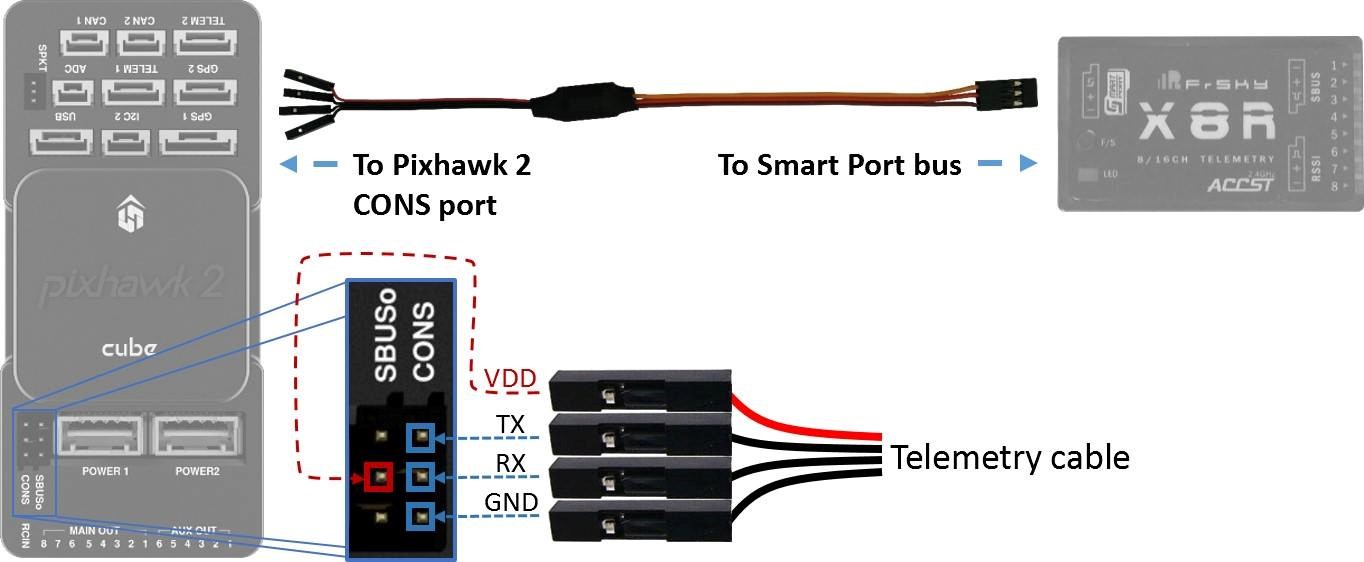
what baud rate should the set in the serial port for the pass thru
well work it out air speed tubes where squashed flight timer don’t start till gets air speed
Good to know, it did let you arm but the is flying flag would not be set, did you get also a specific error message like airspeed unhealthy?
Hello Alex,
have tested the Widget on Horus x10 and it runs sooo good. GREAT.
one time I had a black safety screen after the flight when all was powered and hold the copter nose down 90°.
The Batt warning maybe should trigger with a bit delay because when I give strong throttle the voltage goes for a short time below the parameter.
greetings
it was in the logs it sat a zero i had turn down volume of the nagging wife so i could here the plane
Hi Roland, thanks for the feedback, I managed to reproduce it twice, I’ll look into it.
Many “first” things this morning in the flying field:
- First time of my pixhawk on my refurbished old Scanner
- First time of my Horus and a gas plane (second plane overall… got it one month ago!)
- First flight with your (awesome) widget
Your widget was great to:
- Look at all the messages the pixhawk had for me (yes, I had my laptop, but the bright screen of the Horus is way easier to read than the black Mission Planer window… MP was really left behind)
- Check min speed when doing the Autotune (to make sure it kicks in)
- Since it is a widget that keeps the sensors alive, I could use another widget to plot altitude and speed to check for stall (at very high altitude, visual was not obvious)
- Being told the selected flight mode is extremely useful with the 6pos switch
- Once the plane+pixhawk was properly tuned, I could not get my eyes out of the screen

What makes me scratch my head (this is personal, mostly because I fly gas planes)
- That huge battery monitor… my batteries last longer than my fuel tank (but drones do need that
 )
) - WRT batteries again, I use two but one is not a LiPo (old school flyer ). Could you allow a wider range in the “batt alert setting” so that it can be set it to 5v (I override the cells setting that to 1)
- What about a small map and a dot moving on it? The user should provide the map and the corners… makes sense?
- And that’s all… before that I was using the non-widget version (no flights yet) and I was wondering if it could ever be brought into a widget… it arrived just in time!
Everything was a success and the 27 minutes flight allowed me to do all the basic tuning I wanted to do. Now it’s time to look at the logs and fine tune it.
This is just great! Congratulations for the great work!! 
What makes me scratch my head (this is personal, mostly because I fly gas planes)
That huge battery monitor… my batteries last longer than my fuel tank (but drones do need that
)
WRT batteries again, I use two but one is not a LiPo (old school flyer). Could you allow a wider range in the “batt alert setting” so that it can be set it to 5v (I override the cells setting that to 1)
What about a small map and a dot moving on it? The user should provide the map and the corners… makes sense?
And that’s all… before that I was using the non-widget version (no flights yet) and I was wondering if it could ever be brought into a widget… it arrived just in time!
Hi @nicolaufg,
first of all thanks for the kind words!
The battery monitor is BIG I know, I recon it’s a bit biased ![]()
Gas planes and copters have different needs and if we can identify common needs for the “gas engine world” I’m willing to design a dedicated layout
So if we imagine a GAS mode for the script than the battery alerts could have different levels.
And last the MAP idea, I must admit I love it ![]() but I would dedicate a widget to it. the problem is it would probably eat a lot of memory if features as waypoint plotting or course plotting were to be included.
but I would dedicate a widget to it. the problem is it would probably eat a lot of memory if features as waypoint plotting or course plotting were to be included.
Anyway, back to the GAS world, since the passthrough library has no support for fuel engines what I would need to know are the names of the sensors to be shown on screen and the priority that a pilot gives to them, I imagine RPM, and gas suite’s TEMP,FUEL,SPEED, ideally I would need a screenshot of those, I have no idea if this is a common need. I know for instance that @ChrisOlson did write his own script for the passthrough library did not provide what he was after.
cheers,
Alex
@yaapu I can provide you with the sensor ID’s for the FrSky Gas Suite and how I laid them out in my custom script for it. There is a Lua script that comes with the Gas Suite but it sucks. I made a much nicer one. When I get home this evening I can post that information for you and explain how the Gas Suite does the fuel calculations, etc with its fuel-flow sensor.
1 Like
Alex, in the FrSky Gas Suite the sensors are:
0D10 23 (Tmp1)
0D20 23 (rpm)
0D30 23 (Fuel volume remaining in cc)
0D40 23 (fuel percent left)
0D50 23 (current fuel flow)
0D60 23 max fuel flow)
0D70 23 (ave fuel flow)
0D00 23 (Tmp2)
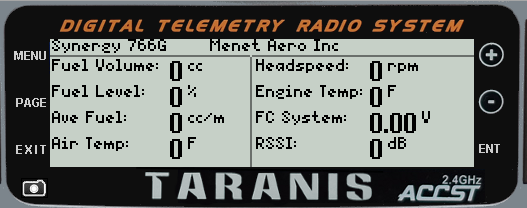
So I don’t need to know max fuel flow or even current flow. I’m interested in average fuel flow and how much I got left. So I made my screen like this and I made the numbers big enough to be easily readable (otherwise it’s reading glasses in my old age here).
When you put gas in the helicopter tanks you go to the Gas Suite lua script and enter in the amount you put in the tanks. The heli holds 2.4L but I don’t always fly with that much. This is stored in the flash in the Gas Suite unit. So I can fly a flight and if I put in 1500cc and burned off 500cc, the next time I fire up the helicopter it shows that I got 1000cc of fuel left in the tanks. It also keeps track of average and max fuel flow and retains that start to start until I reset it with the Gas Suite script.
It’s pretty accurate but you have to calibrate the fuel flow sensor - that is done in the Gas Suite lua script too.
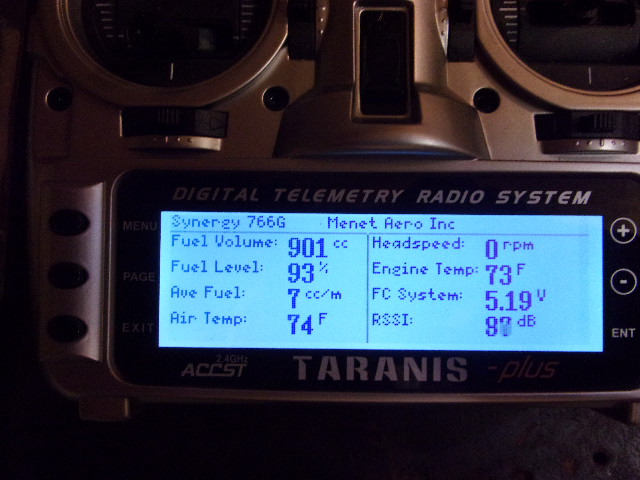
This is what mine looks like on the radio screen with actual values. I had put fuel in one tank and was running the helicopter on the ground at flight idle to do some tests on the generator/charging system. So it has 901cc of fuel left in it and average fuel burn on the ground running at flight idle with the clutch engaged was 7cc/min
If I don’t put more fuel in the next time I fly it, since it easily has 40-45 minutes of fuel in it, I’ll likely go into the Gas Suite script and reset the average fuel flow to zero so I can track average fuel consumption during the flight.
I don’t track the real-time fuel flow because it doesn’t tell you anything except that the engine is running and it’s burning fuel. The average tells you how much flight time you got left by dividing it into the remaining cc in the tanks.
I also got a girl in there that warns when there’s 10% fuel left. That is a one-time warning. And then she warns again when it’s down to less than 100cc (5 minutes left at usual average fuel burn). And she keeps complaining about low fuel every minute when it gets down to less than 100cc left in the tanks.
The voltage and RSSI comes from the receiver and that is the Flight Control System voltage that the Pixhack V5 is running on from its power module. The charging system voltage is higher (usually 7.9-8.0V depending on electrical load in the heli) and that’s shown on the Ground Station, also from the flight controller’s power module.
The battery stuff in the electric scripts doesn’t tell us anything for a helicopter that flies 2 hours in a flight and has a charging system. All it’s good for is similar to the battery meter or light in your car to tell that the alternator is working, or not. Although other gasser pilots that don’t have a charging system will probably want to know what the voltage is - but the amp draw on the flight systems battery can’t even be measured by any normal power module. So battery percentage, amps - means nothing because amps is always zero.
Hi Chris very detailed info, do you read the values with sportTelemetryPop as the gas suite lua or with getValue?
That Gas Suite looks pretty cool. I’ll wonder if I could plug my IR RPM sensor instead of the HAL sensor (is there a multiplier? I count 4 pulses per rev). I was experimenting with a Teensy to manage all my airbone stuff and interact with my (old) Multiplex Telemetry (MSB), but I finally gave up and got a Horus (betrayer? ![]() ). I know ArduPilot can get RPM from a sensor, but I have seen it is not sent in the PassThrough Protocol.
). I know ArduPilot can get RPM from a sensor, but I have seen it is not sent in the PassThrough Protocol.
WRT what is needed on the screen, I’d say RPM and fuel remaining are a must. Fuel consumption is the next step towards economising longer flights (and thus no need for instant reading, better an average as Chris points out). I guess a heli also needs temperature reading, which is less of an issue in planes.
I’m not aware how things are painted in LUA, but I guess we’ll have to deal with what is repainted and what is not… I don’t think we need anymore than 1 or 2Hz but I read somewhere widgets have a time limit to run ![]()
But I’m just thinking loud… I have not coded a single line in LUA, so I better learn and shut up.
Hi Alex, I use getValue. The code for my custom Gas Suite script is here. It is a simple script and takes little memory to run it. A long Page press will start the script if I set the model’s telemetry to use the script.
Rather than put the warning girl in the script I just use Logic Switches to make the girl issue the warnings. I have warnings for high or low headspeed as well, and a one-time warning if the governor is not engaged during runup, or if the governor is disengaged in flight and going to throttle curve. I have updated or modified some of the sound files and still have to upload those to the GitHub, as I planned on putting those warnings into the script eventually. But I’m not done with that yet.
Yes, you can set the ratio for the RPM sensor. But it doesn’t really matter what it puts out because in the script you can do maths to convert it to actual. I have one script I did that will show both engine rpm and headspeed - one value is gotten from the sensor, the other is calculated in the script based on the helicopter’s transmission gear ratio. I am using that script in my turbine helicopter, with some extra maths, to show Power Turbine % (two-spool engine) so I have a N2 gauge like full-size turbine helicopters have. I have not uploaded that script yet to GitHub as it is still a WIP.
Your IR sensor should work. All the Gas Suite module firmware looks for is a sine wave as would be from a CDI ignition trigger. I am using a powered hall effect sensor on one helicopter (turbine) with a single magnet on the autorotation gear in the helicopter’s transmission. On another one with a Zenoah engine with magneto I am taking the signal from the engine’s ignition primary. It works both methods.
1 Like
Hi all,
new release for the Taranis radios X9D, QX7 and X-Lite
version 1.7.0
- units settings for distance and altitude inherited from radio settings (imperial/metric)
- units settings for horizontal and vertical speed selectable from config menu (m/s,km/h,mph,ft/s,ft/min)
- implemented cohen-sutherland algorythm for hud line clipping
- added imu temperature support
- fix for roll and pitch overflow
- removed Tmp1 and Tmp2 OpenTX sensors
- moved all sensors to last instance 0xF of the respective frsky sensor ID (requires a new sensor discovery)
- added ARM sensor to expose to OpenTX arming status
- fixed home icon position when angle beyond +/- 90
- some code refactoring
- removed power from left panel
- added efficiency on left panel as mAh/speed
you can find the latest version on github
Cheers,
Alex
Hi Alex,
The percentage of battery capacity left is always at 99%. Even when the voltage of the battery is low. Any suggestions?
Thanks
Hi Pavan,
please double check that you can see current and mAh in mission planner, it seems that your power module is not properly configured or configured as voltage only.
cheers,
Alex