Why does the altitude quadrotor on the mission planner suddenly change to minus? and when in landing mode, the quadrotor can’t land, instead it gets taller. I use realsense as non gps navigation. this crashes my quadrotor badly.
(Add: we couldn’t get the log)
Without the .bin log we can not help you.
And please do not use ArduCopter 4.0.x update to ArduCopter 4.3.6 ASAP.
I can’t download the log because I used guided mode (no arming from remote)
Guided mode also produced a .bin log file.
Could you help me to get the log?
406FPV
May 7, 2023, 4:01pm
6
I used pixahwk cube black and fimware ardupilot 4.3.0
there are some logs I have when I activated non GPS navigation
could you help me to find my log ?
406FPV
May 14, 2023, 1:04am
11
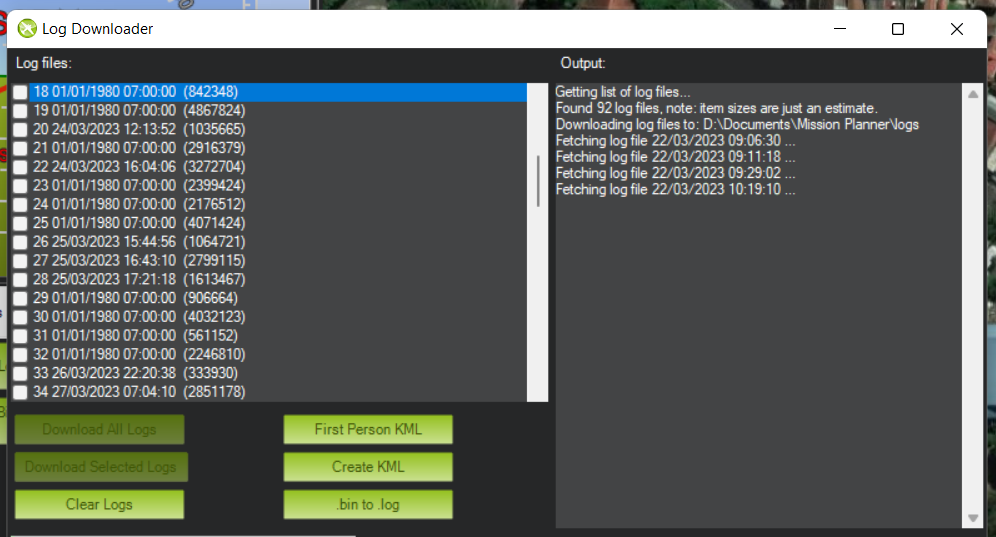
which log do you think it is as that will help narrow it down? I see some have current time and date. Sorry I am traveling right now teaching
yeah. therefore, I am also confused because there is a log with the same date.
You need to make sure you get GPS lock, before arming. That way the log date will be correct.
Not having a GPS fix will cause a 1980 date. in the logs
could you help me to analyze this log?