I was trying to run a simple mission where the vehicle takes off to an altitude of 5 m and fly to the next waypoint and perform loiter unlimited.
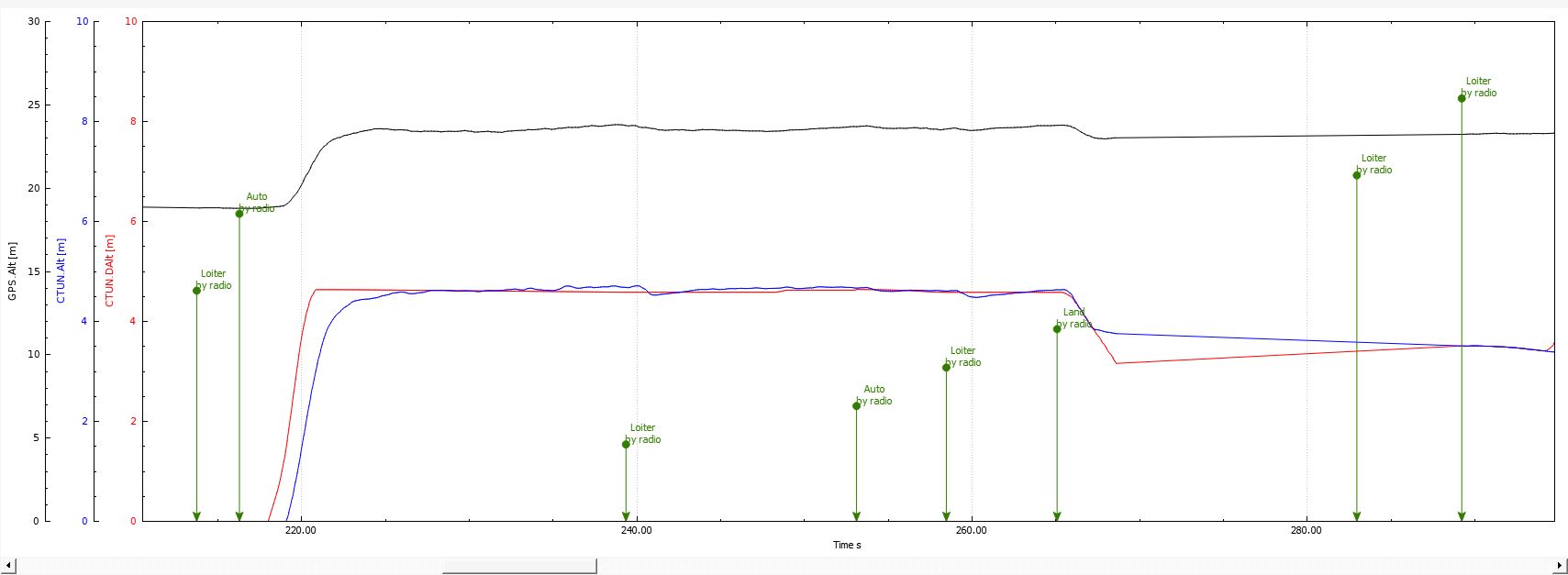
However I observed that the altitude of the vehicle seems to be off. I estimated it to be about 2.5 m rather than the programmed 5 m. I have included the logs and the mission here:
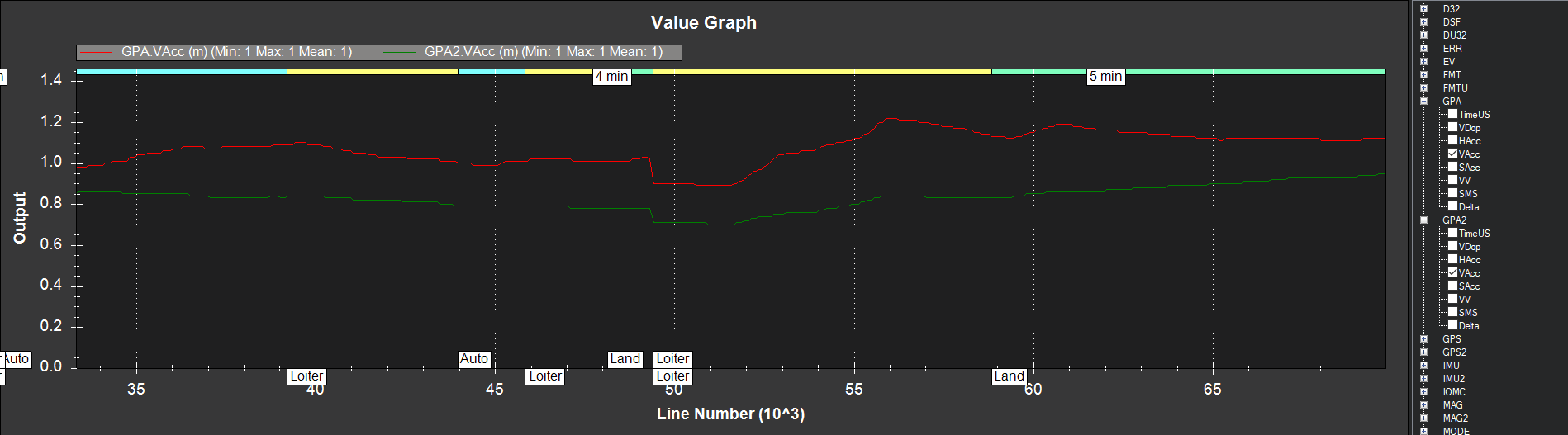
But the baro and gps altitude seem to be correct.
I am wondering anyone here experienced this and have solved this issue.
I would think the flight modes were configured correctly. The mission ran correctly with just the wrong altitude. Reviewing the log did show that I have switched into Auto.
I don’t see any discrepancy in the log between desired altitude (~5m), actual altitude and GPS altitude as you have said. I suppose that GPS is reporting close to the correct altitude for that location near Singapore. The GPS altitude delta is also correct. So it’s unexplained what you are witnessing. That’s cool you have a drone park. Is it public?
You are right. I did not have any delay entered in the mission between the takeoff and the first waypoint and my waypoint-radius was set at 2m. I tried a mission with takeoff -> unlimited loiter and after the vehicle stablised, the altitude was within 20cm of the 5m that I intended (measured with a rangefinder place right under the vehicle on the ground).