In an effort to improve on precision in automatic landings we are using a lidar rangefinder (Tf Mini Plus - max range 12m) and GNSS RTK. While horizontal control with RTK GNSS seems to be significantly more precise than with stand-alone GNSS, we are not convinced that RTK GNSS and the rangefinder have the desired effect in altitude control. We have set GPS as primary source for altitude except for when the Rangefinder is available at 70% of the 12m max range - i.e. at 8.4m. We have two issues:
-
When landing, the rangefinder shows up much later than at the 8.4m altitude threshold - sometimes only at less than 2m. During take-off it seems to be used as expected.
-
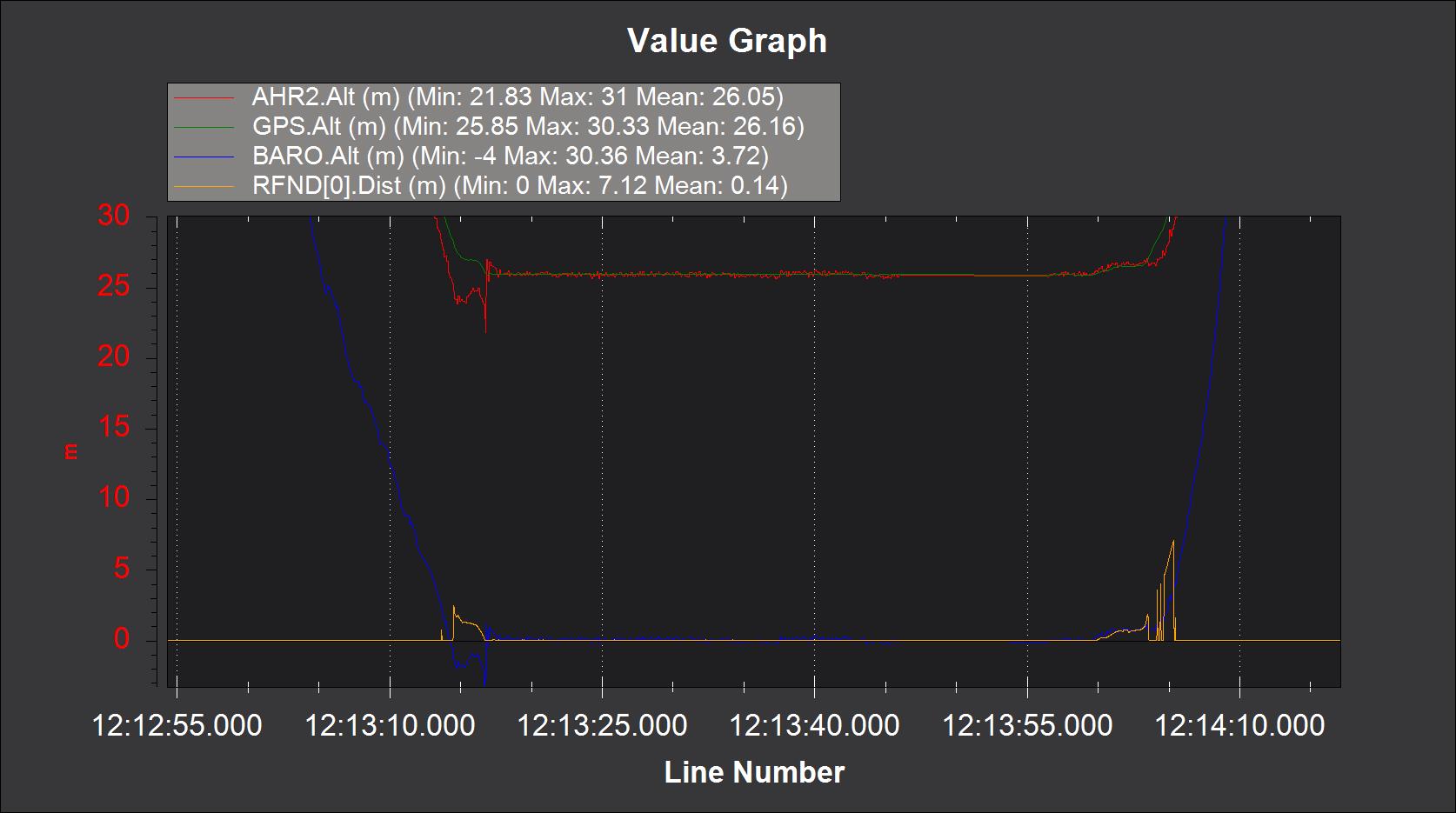
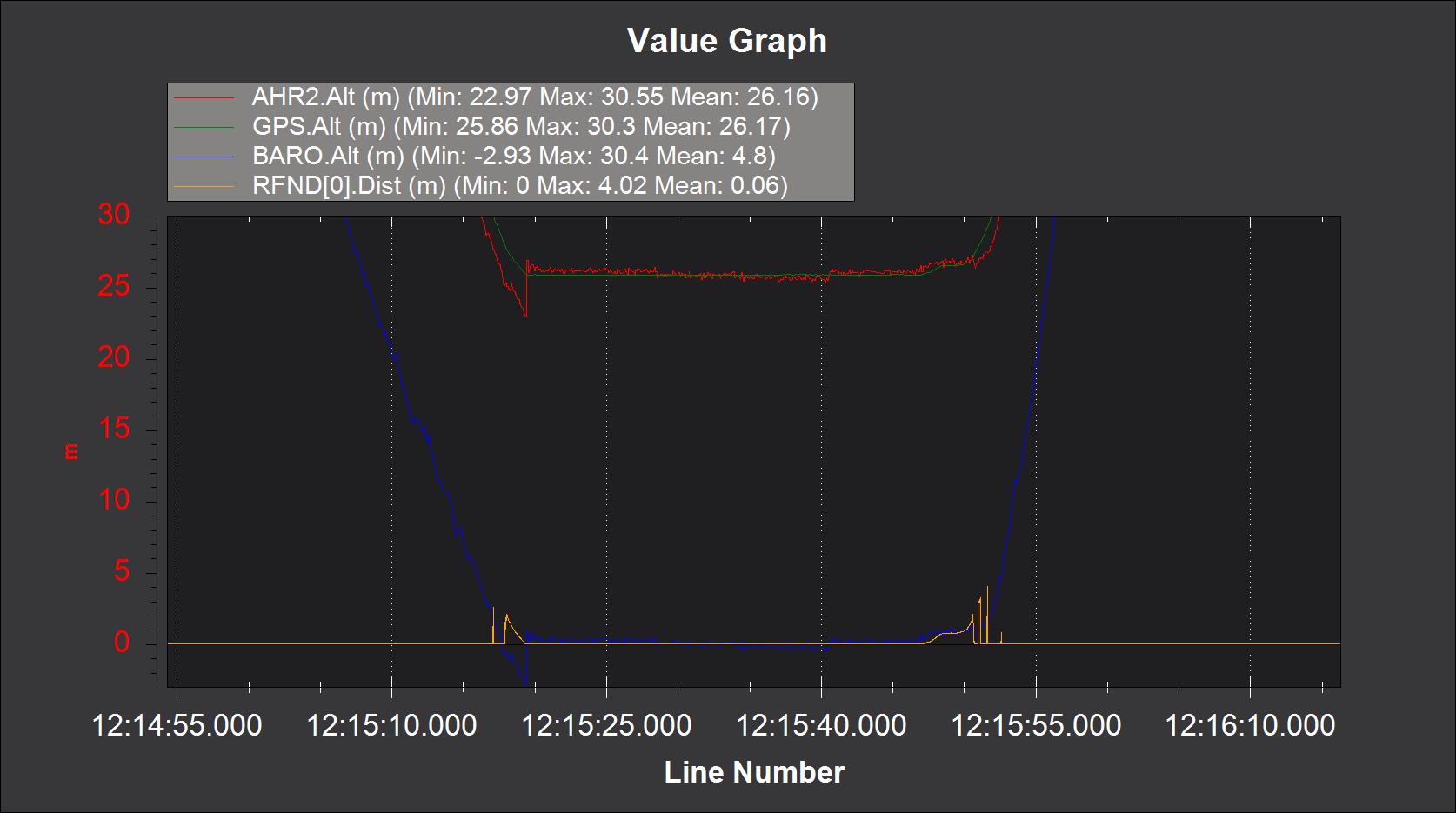
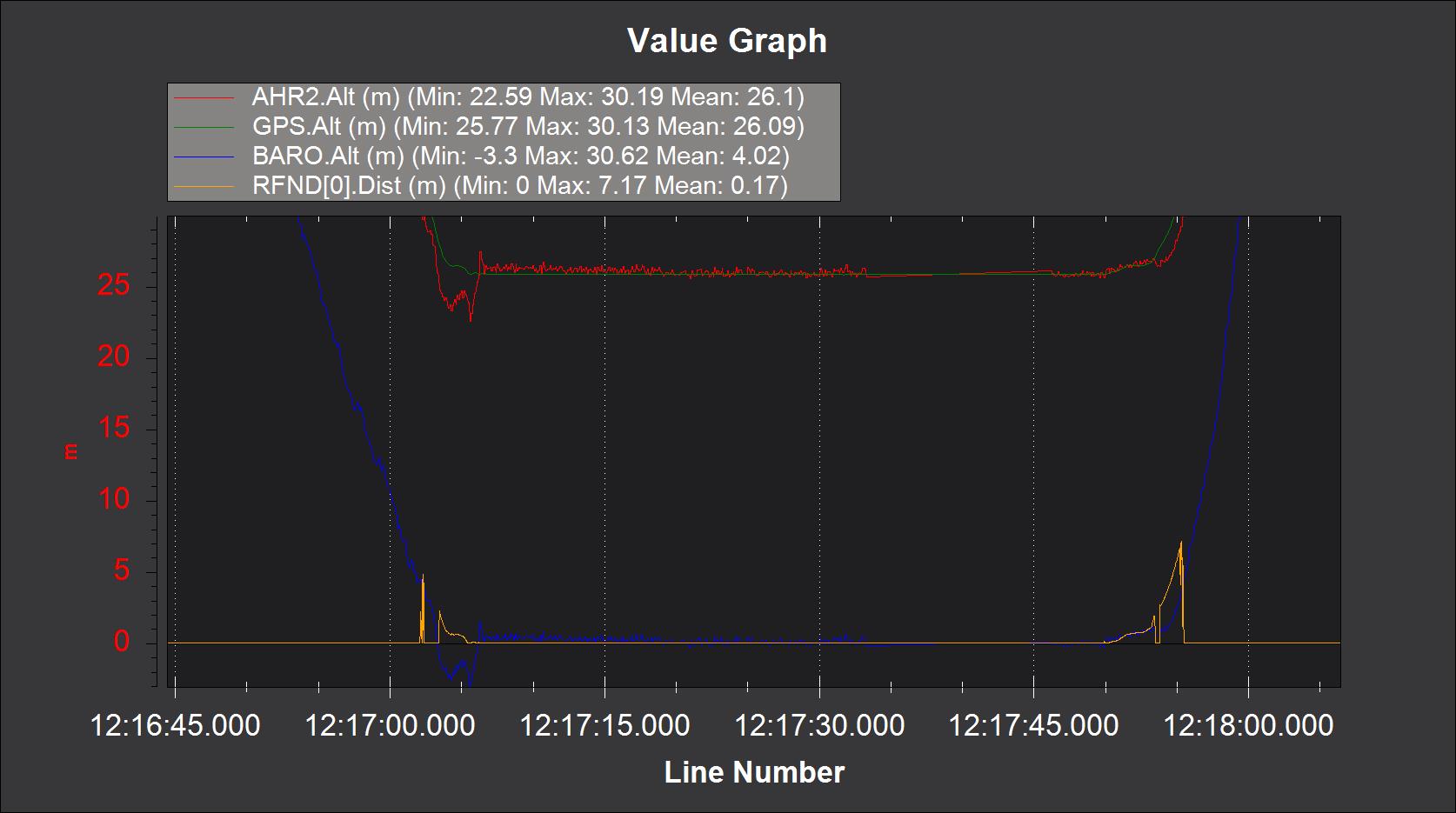
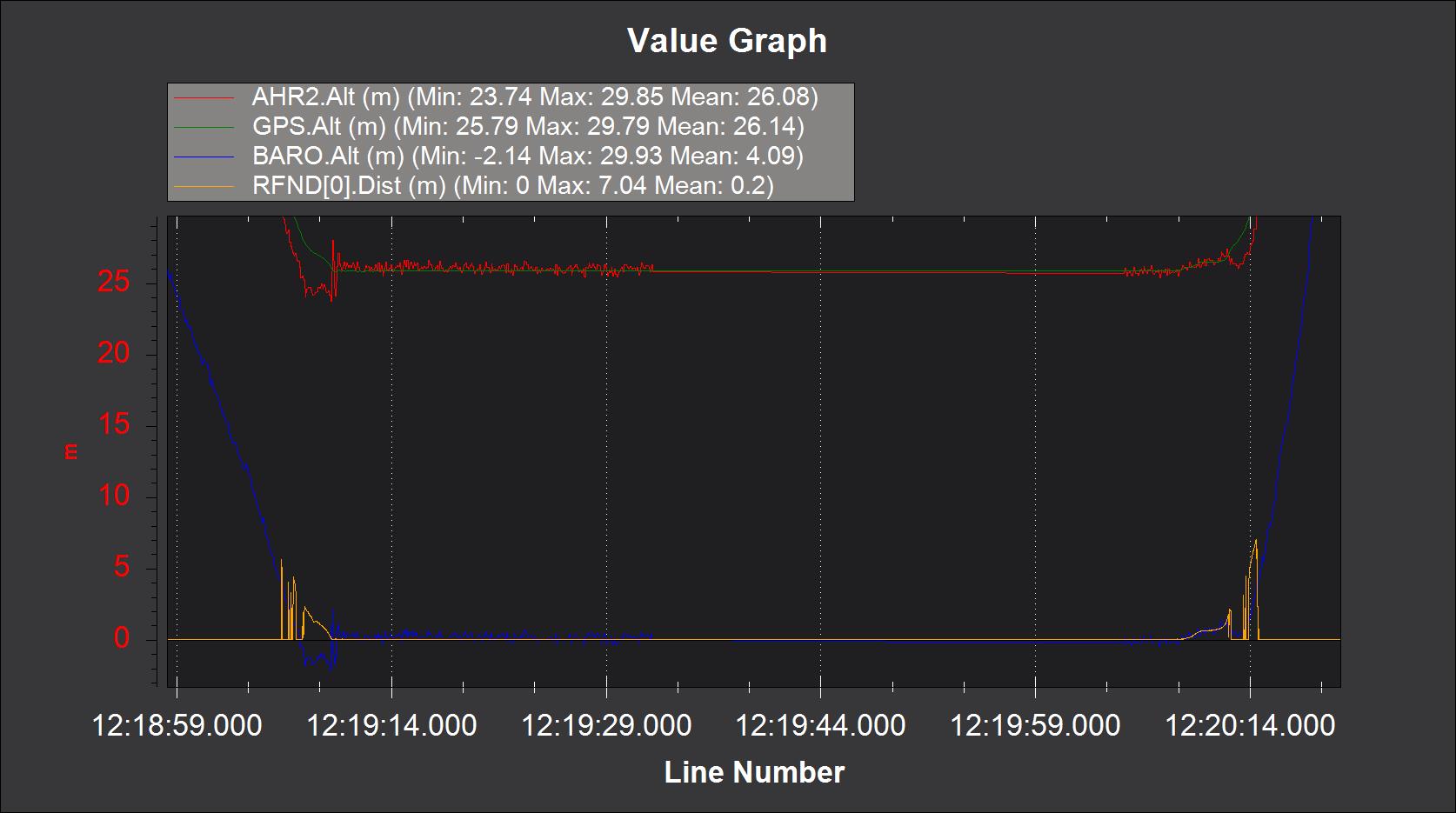
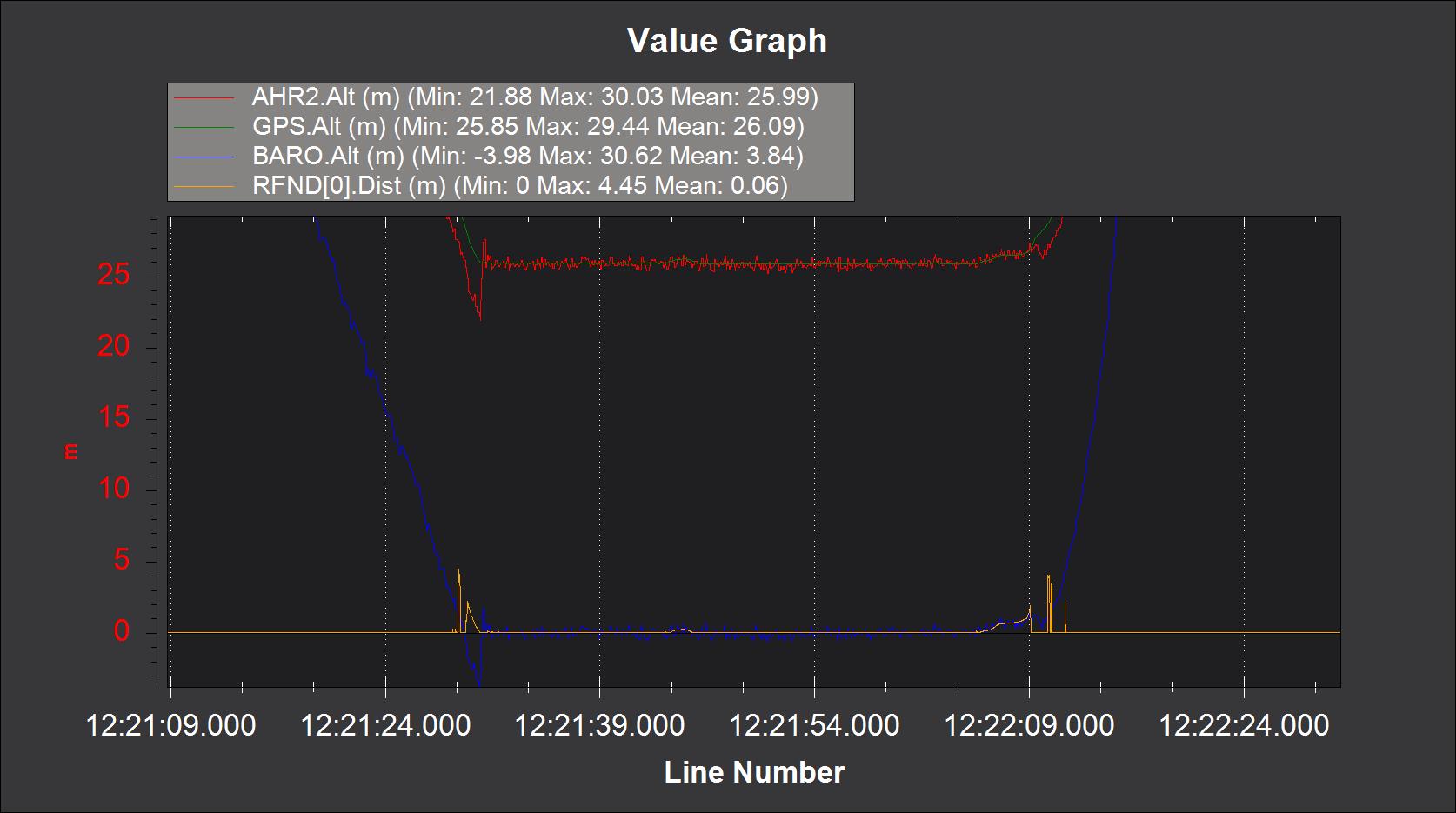
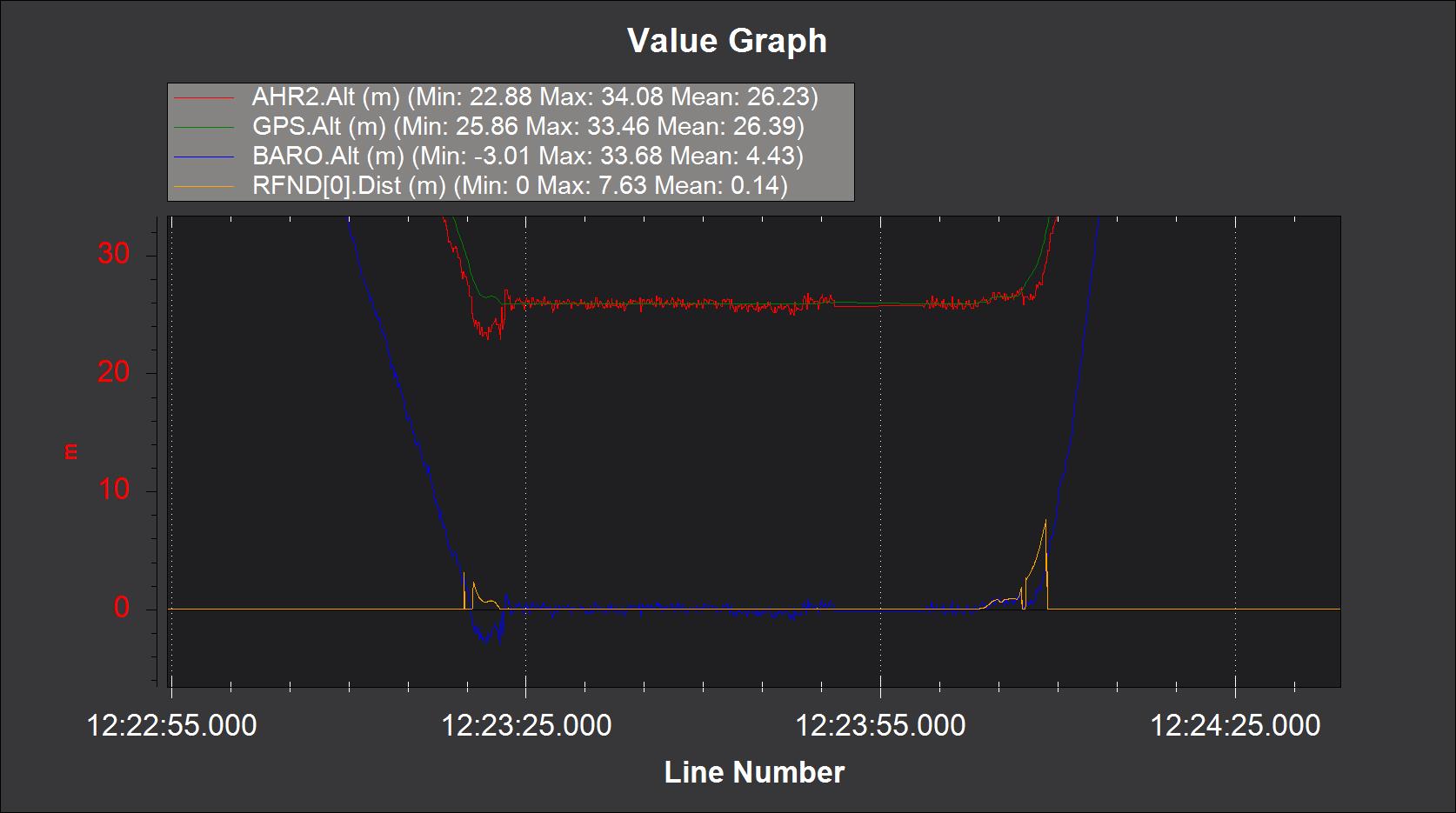
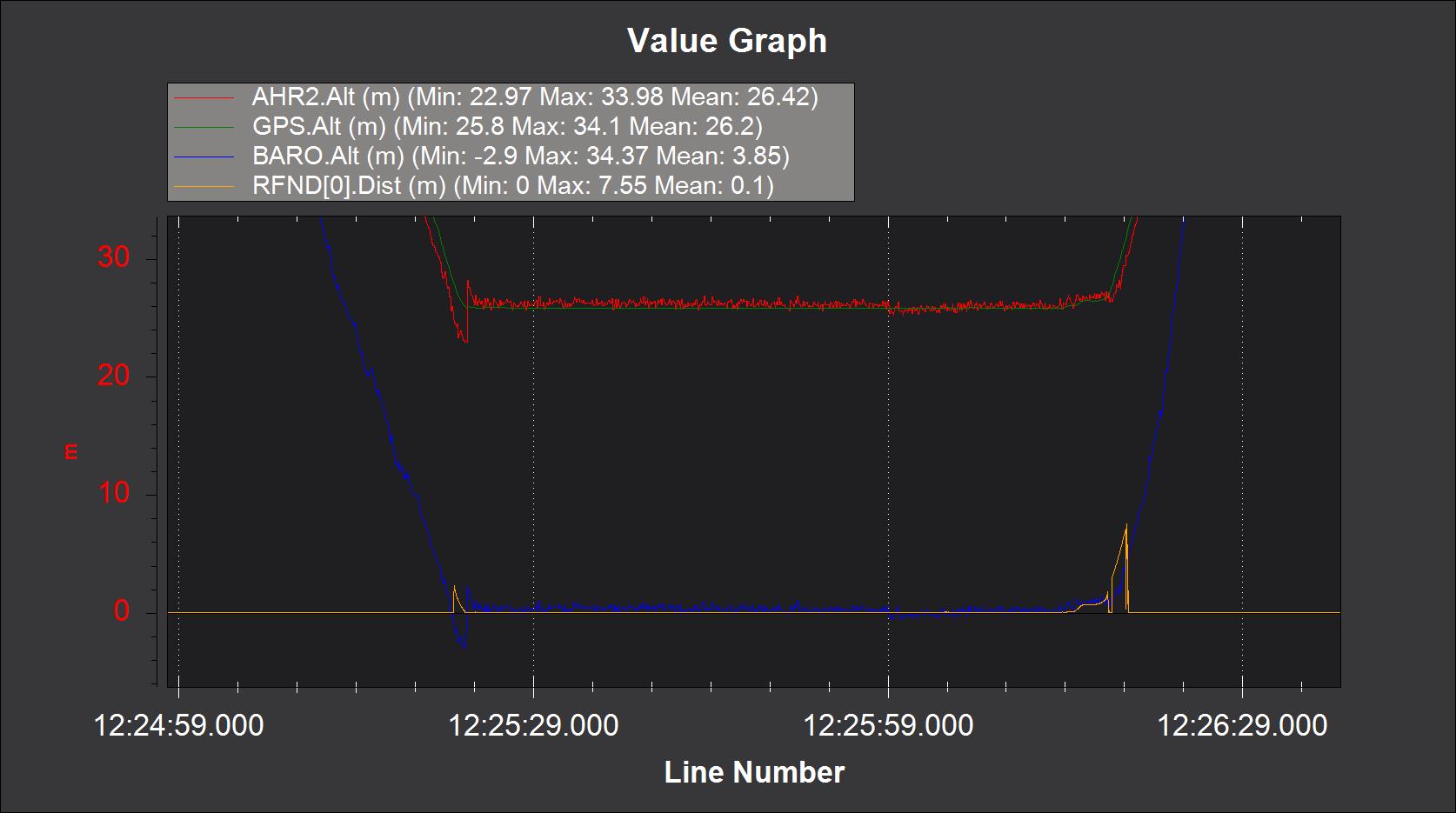
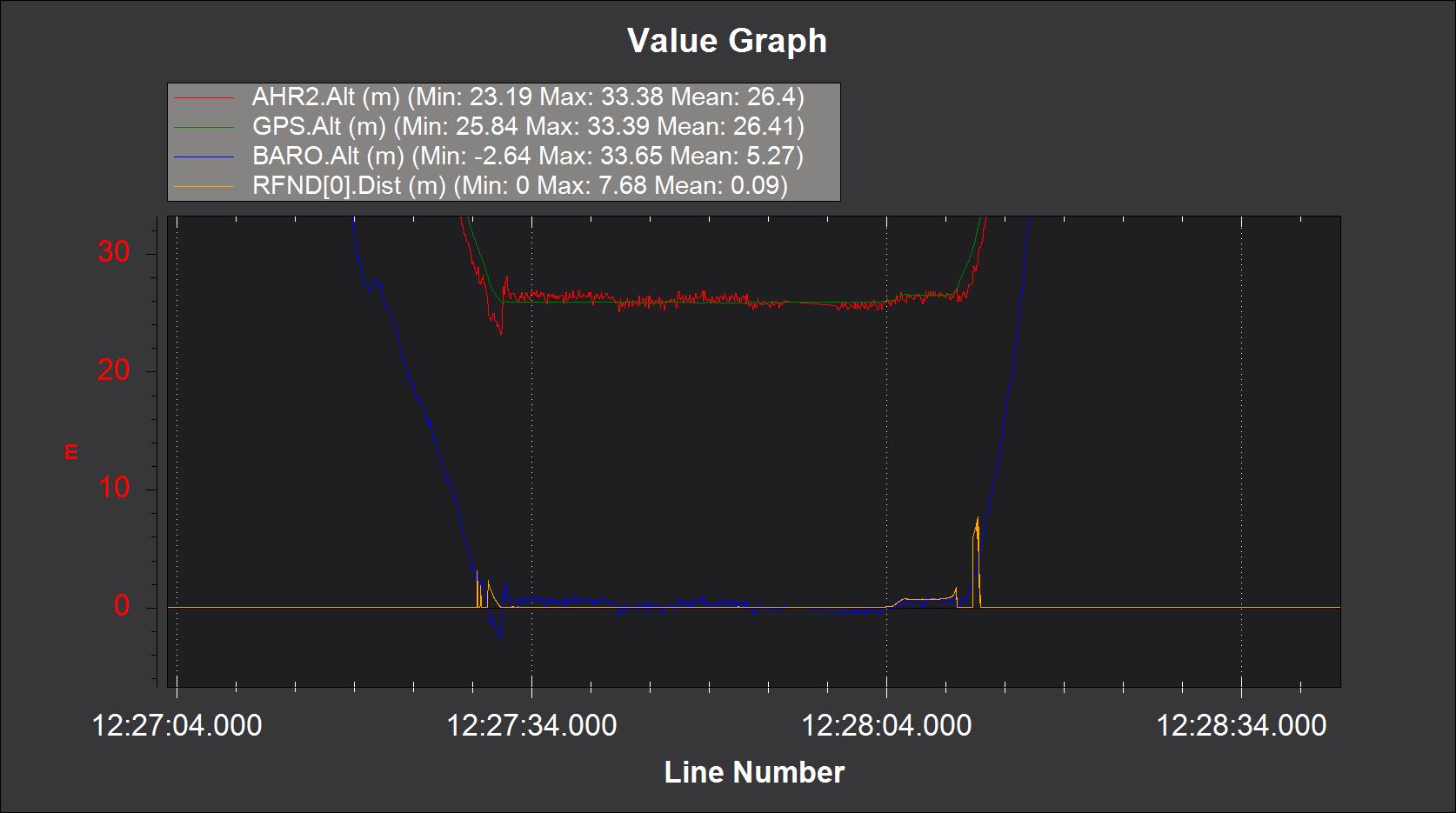
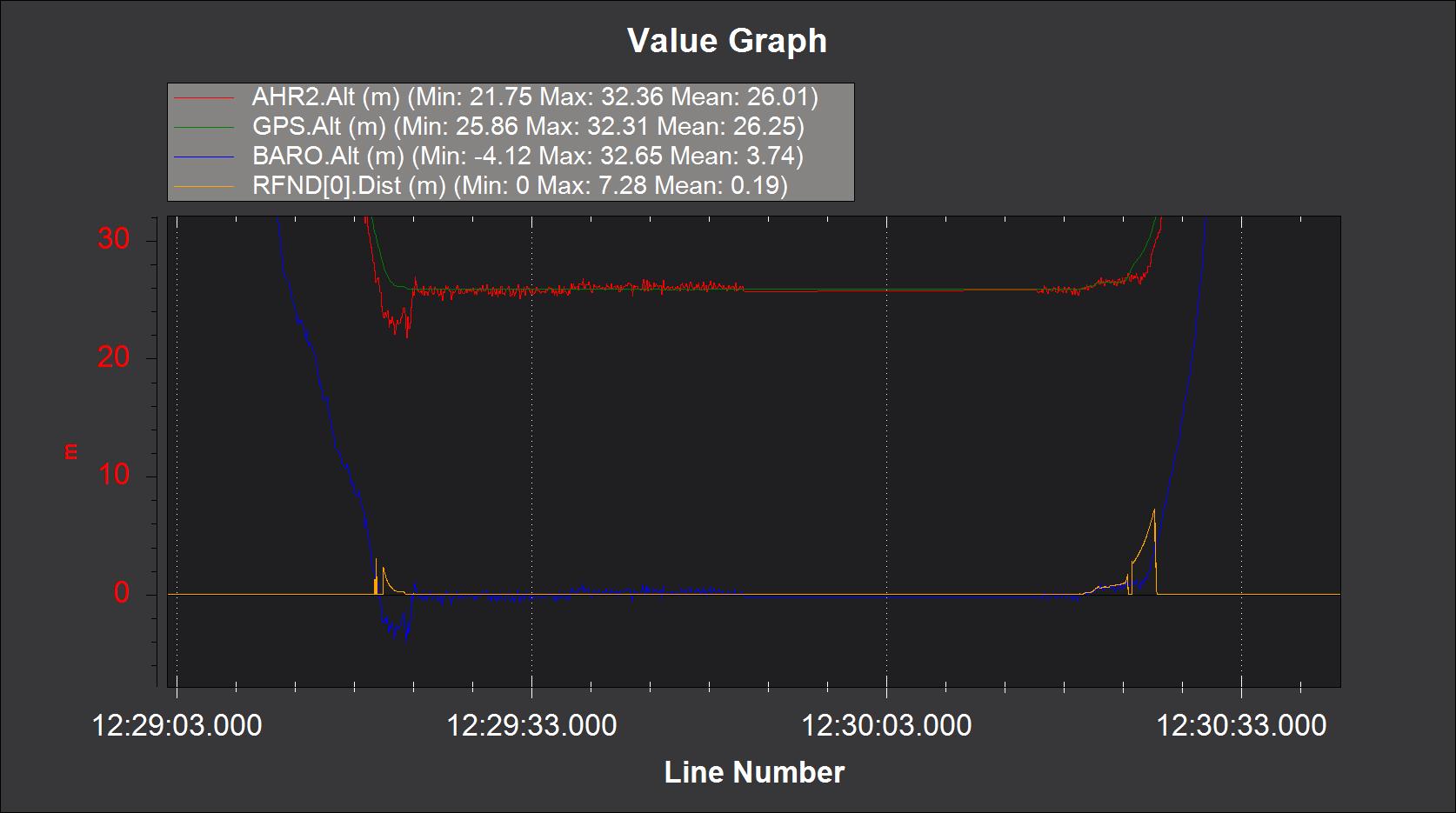
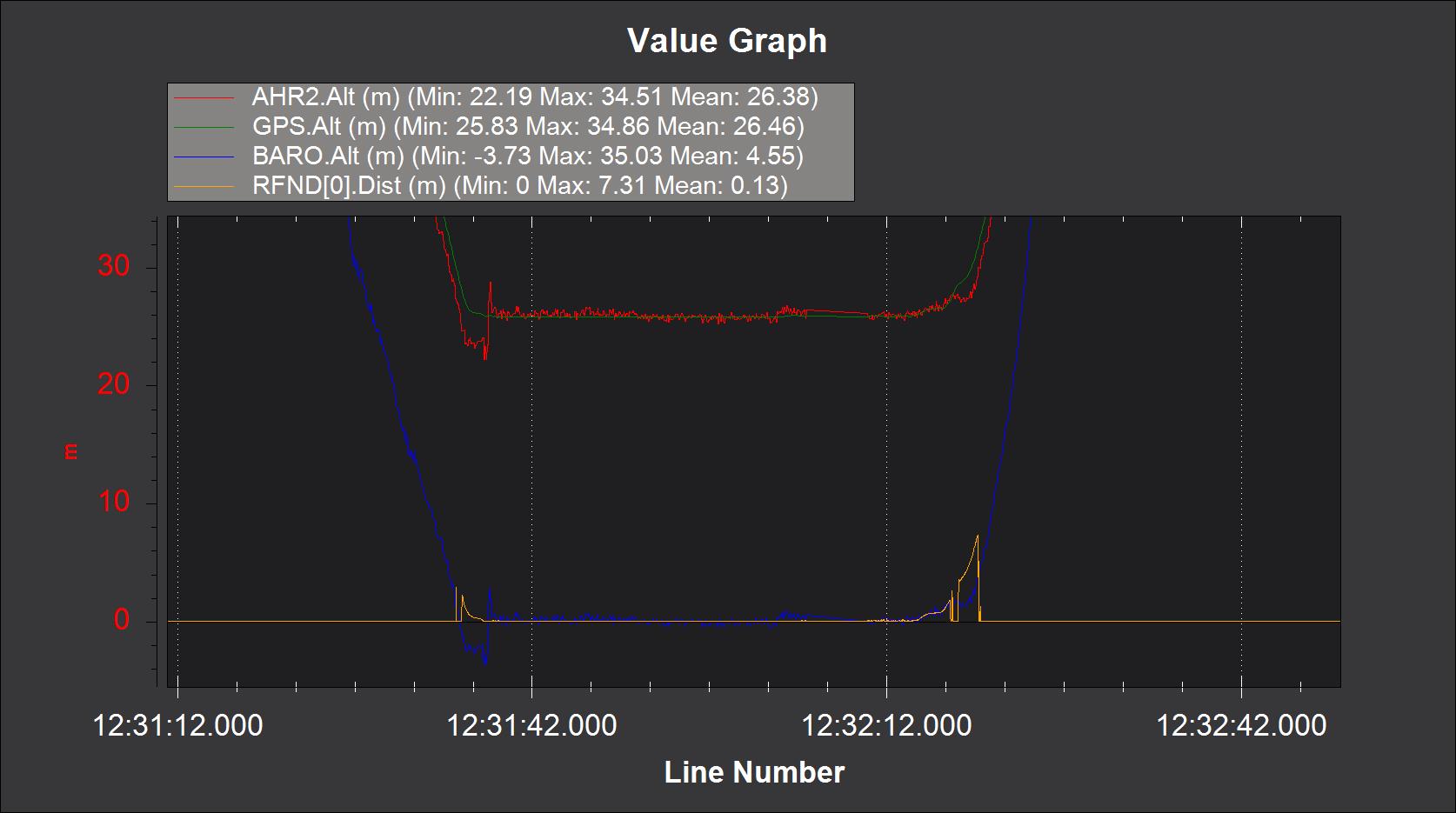
There is consistently strong correlation between Barometer and AHR2 Alt on the one hand and similarly strong correlation between the two precise altitude sources i.e. rangefinder and GNSS RTK. On the other hand there is significant discrepancy between Rangefinder and GNSS RTK and AHR2 Alt.
a. Does this observation perhaps explain why we consistently have overshoots?
b. What can we do to give more weight to RTK and Rangefinder? The weighting of GPS could be automated by using the GPS quality status. In particular, when the RTK GNSS solution is fixed, i.e. when GPS status = 6, it should be treated as an observation with RMS of a few cm and thus be used directly by the flight controller for altitude control. (Note when carrier phase ambiguities in differential GNSS are resolved you not only have cm precision, you also have 99% confidence in the solution. I don’t think the utility of fixed RTK solutions is fully exploited in the filtering - at least I cannot find any reference to strategies based on GPS Status = 6.)
c. Which one of the four altitude values (GPS, Rangefinder, AHR2 Alt and Baro Alt) is actually used by the flight controller?
From the pics below it seems as if the Barometer - the least precise of the altitude sensors - dominates the AHR2 Alt values. We would suggest the following hierarchy in altitude input weight for control during landings (and generally):
i. GNSS RTK (undiluted) and if that fails then
ii. Rangefinder (undiluted) and if that fails
iii. GNSS (stand alone) and Barometer conventional mix