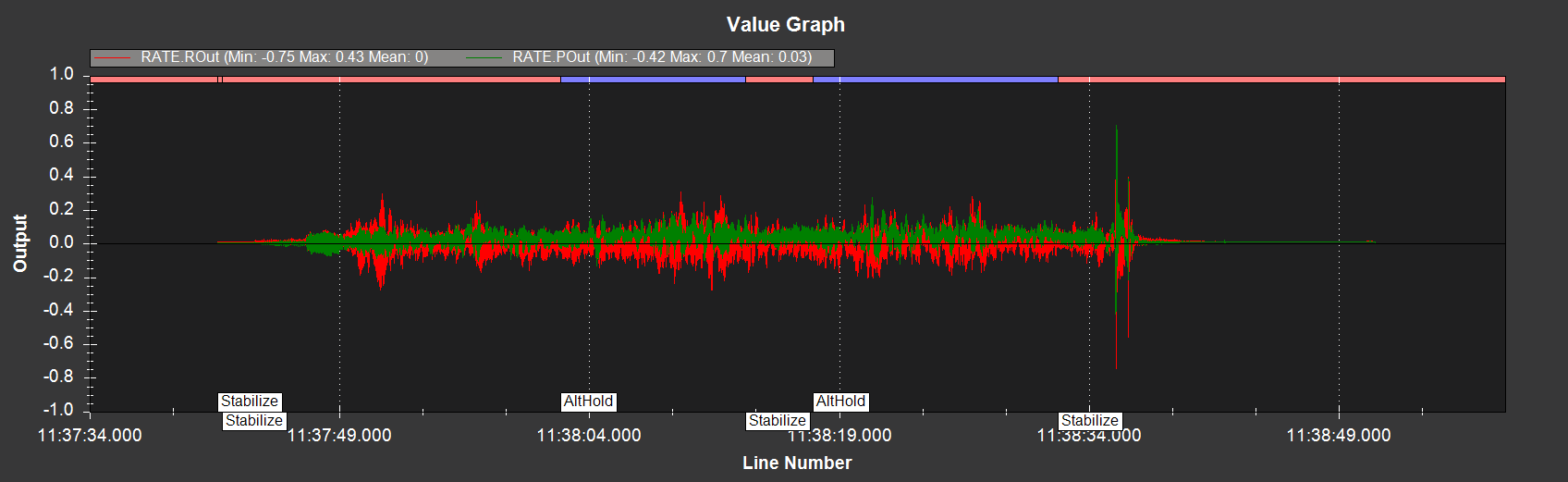
OK with log file we can see that its a tune problem as @dkemxr said
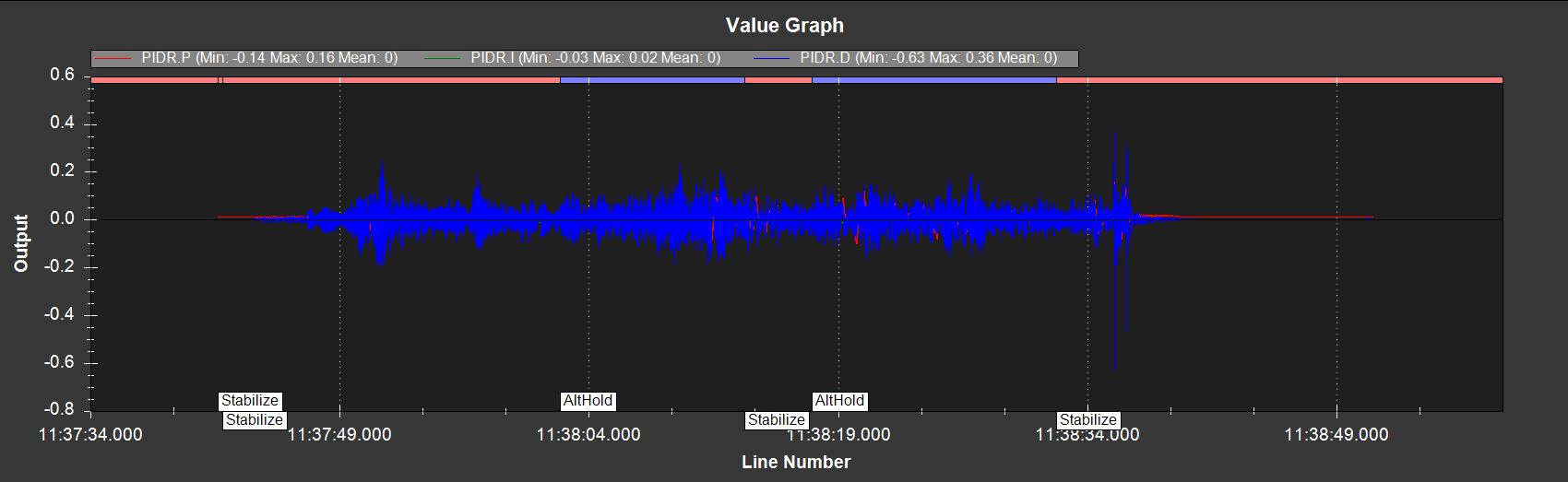
you have noise on your RATE values
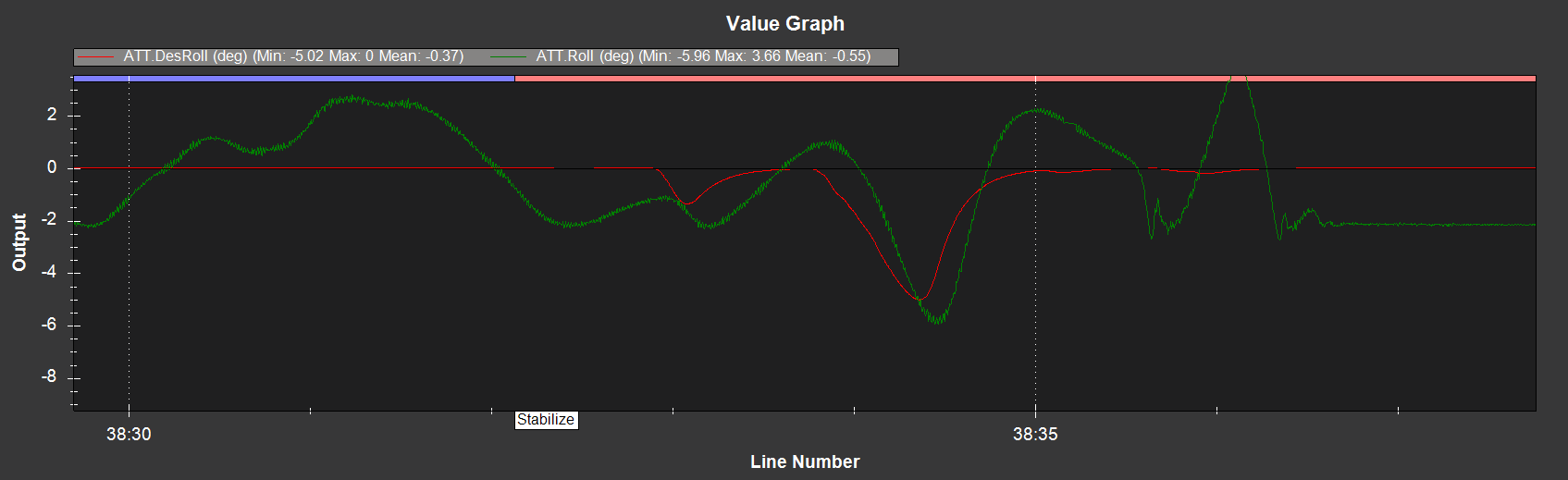
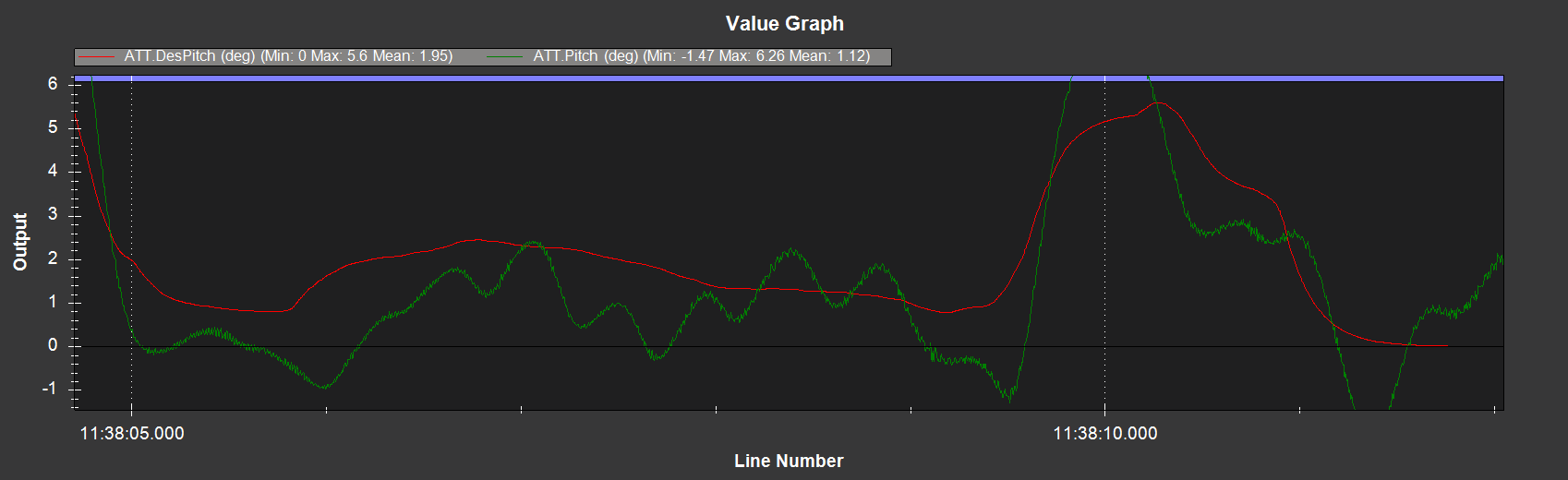
also you can see this noise on DesRoll,Roll and DesPitch,pitch
main soure is D term on both roll and pitch
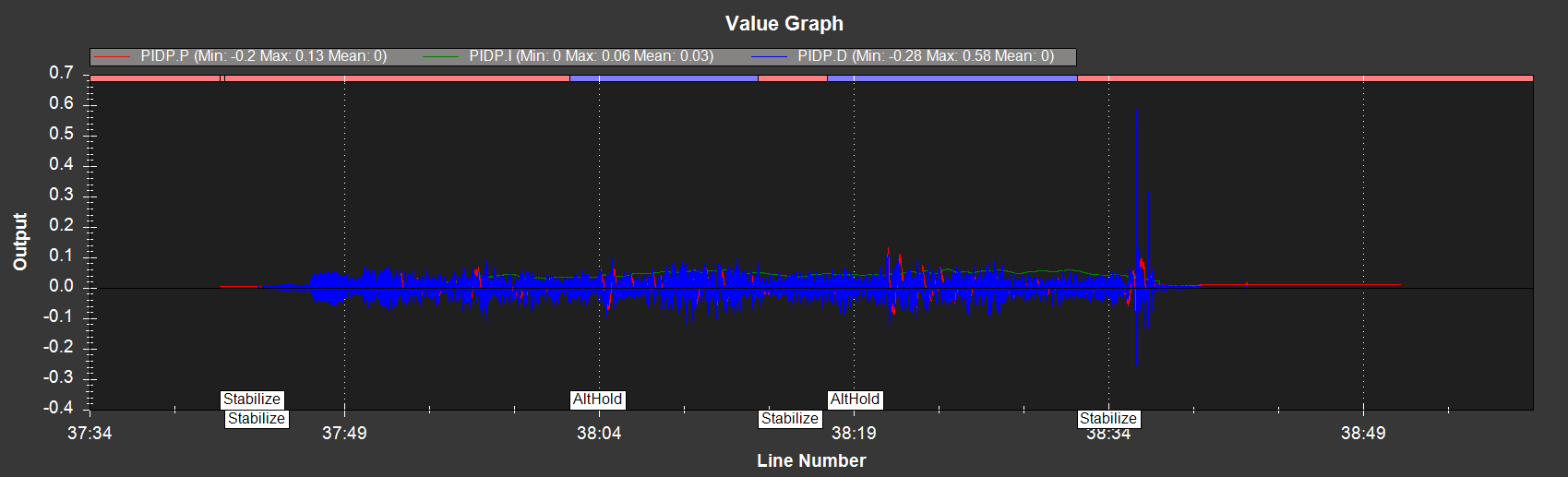
i can see these PID values in your log that they are high for your config

first change ATC_ANG_PIT_P and ATC_ANG_RLL_P to 4.5 and backoff your PIDs in steps of 10% until oscillation disappear then run autotune
Good luck and let us know how you go.