Hello,
I have a copter with following details.
the firmware is fmv3 , pixhawk.
DJIF550 , motor 2312 E , ESC 420 Lite
when I FLOW IN stabilize it was fine , but switching to althold mode the copter landed automatically (without changing any throttle) then I switch to auto land to be sure it is landed .
I don’t understand why in ALThold it started to land suddenly?
Hello
Thanks for the reply @hosein_gh@mboland
I did the Tuning process and the flight was really good
But when I added a bit of weight 120 Gramm to the drone,
I did Not do it again Tuning,
Should I do this every time I add a bit of weight?
As @mboland said without rcout values its hard to find this problem
Cloud you please send full specification of your build?
Propellers,battery,copter weight ?
Did you physically balanced your copter ?
And do you installed vibration damper under flight control ?
Also picture from how FC installed could help
Yees I physically Balance it also,
I had a flight a month ago with the same Setup and every Thing was fine, even loiter mode, auto mode, was fine,( for this flight I did tuning)
But After adding some weight (120 grams)
And flying in stabilize and Put it in ALT HOLD, the copter started to decrease the altitute automatically,
I did not do this time tuning process!!!
Either it’s underpowered or you didn’t fly long enough in an assisted mode to capture the thrust hover value. It’s at .687 which is high. As Mike and Hosein noted enable RC in/out logging and make another flight. You need to hover in an assisted mode for awhile to capture the correct value.
Before you do anything maybe you should update to 4.0.0 and start from there.
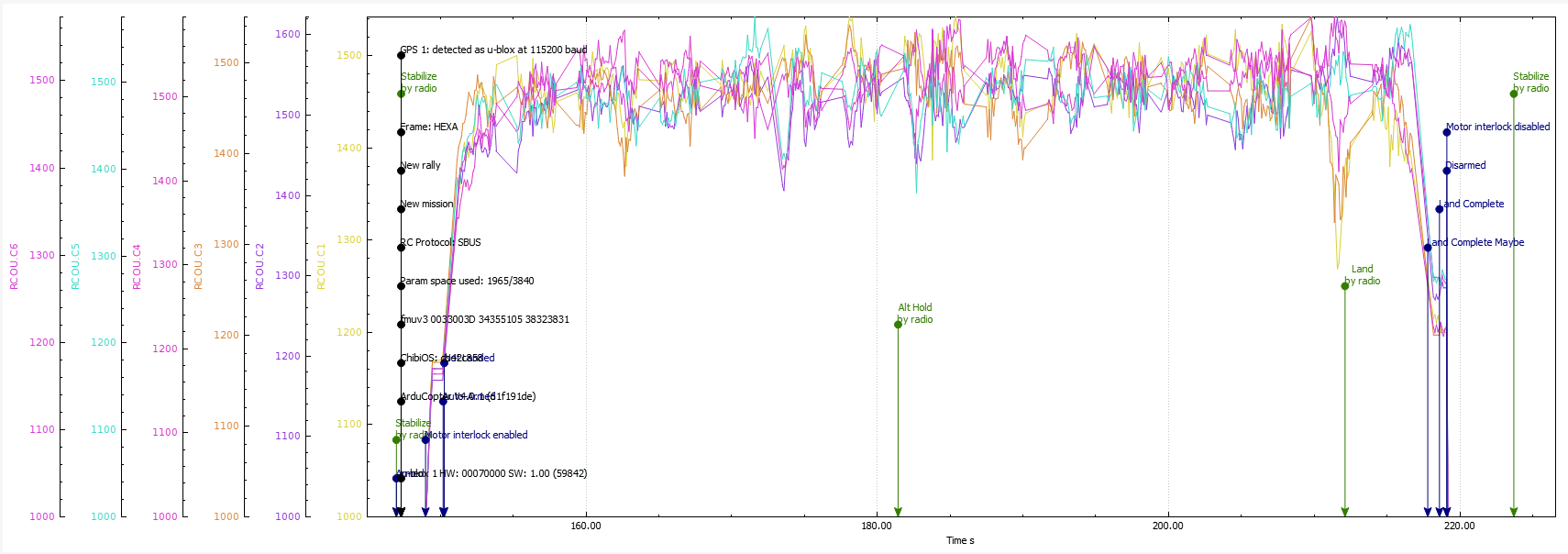
In the log you supplied it’s at 3.6.9. So make another flight and post that log. RC out will show how the motors are being commanded and can indicate thrust capability. When things go wrong it’s invaluable to have this information so always leave it enabled.
Fly until the throttle stick is at mid-position when it’s hovering. There is an indication in the log how this progressed (ThH) we can look at.
Ok your setup is hexa
Thrust of 2312 E motors with 9545 prop with 4s battery is about 800g
And your max Thrust must be about 4800g and your copter is 2800g
So @dkemxr its a little more than 50% but I don’t think its under powerd @Erfan_Jamshidi did you tested your motors ? Is they are healthy?
But totally a log with rc out/in is needed to decision
my copter including everything is 2800 grams. it is take off weight.
Thrust of each motor is 700 grams so hexa : 4200 grams
so thrust to weight ratio is 1,5. so it is not underpowered @dkemxr@hosein_gh.
so I think the problem might be because I did not fly long enough and to let the throttle hover be saved . and started to use alt Hold. because in stabilize I did not have any bouncing and everything was fine.
I will do a second fly and will post the new log.
I uploaded a new log from a flight with my copter and updated firmware version 4.0.1.
Can you explain how to understand the thrust capability from RC in and out ?
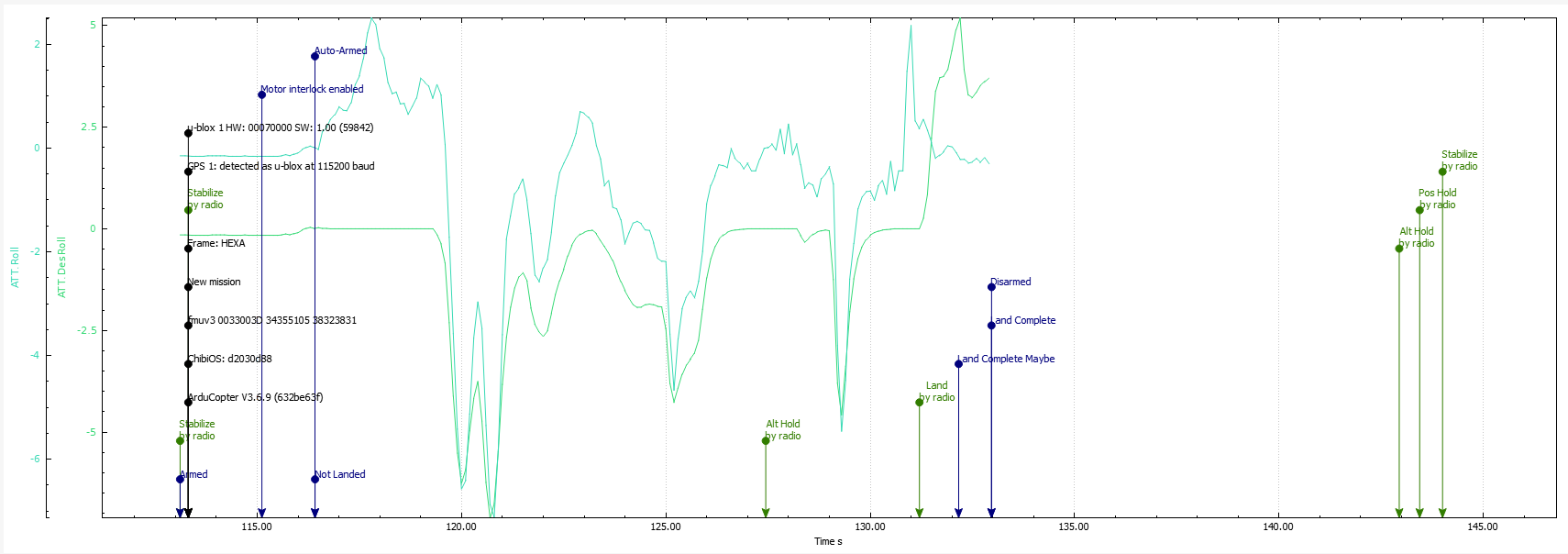
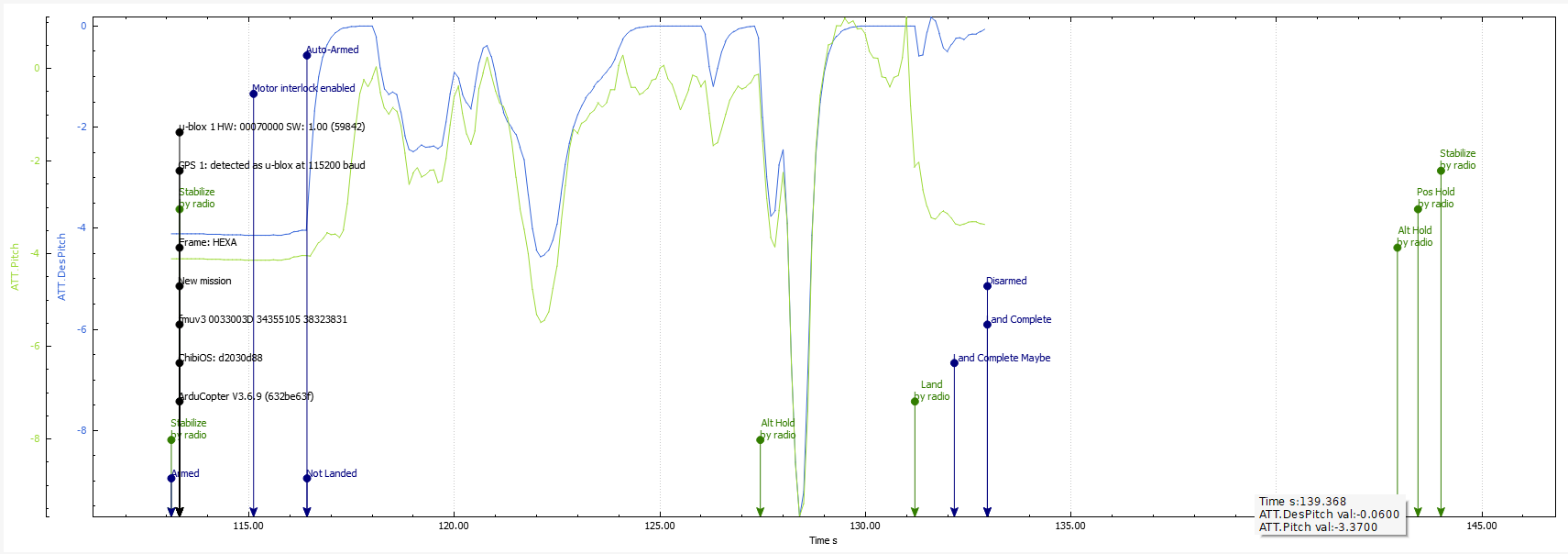
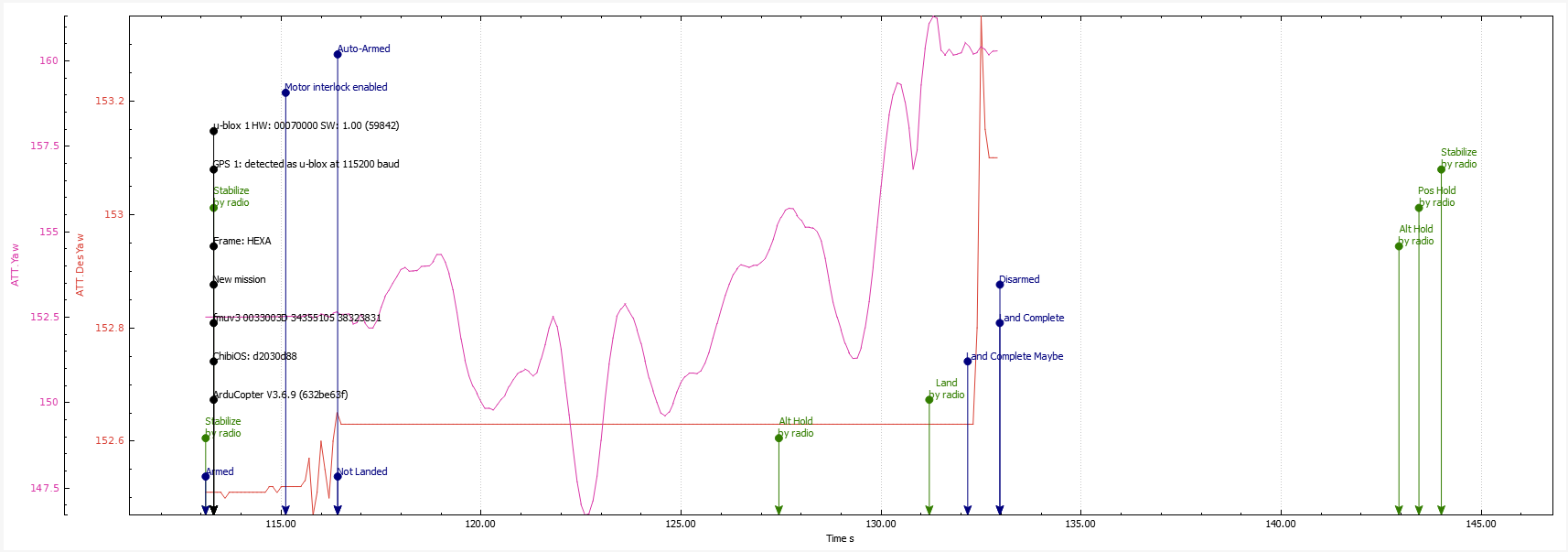
I know that in this flight I did not DesYaw and Yaw don’t follow closly, but roll and pitch seem to be fine.
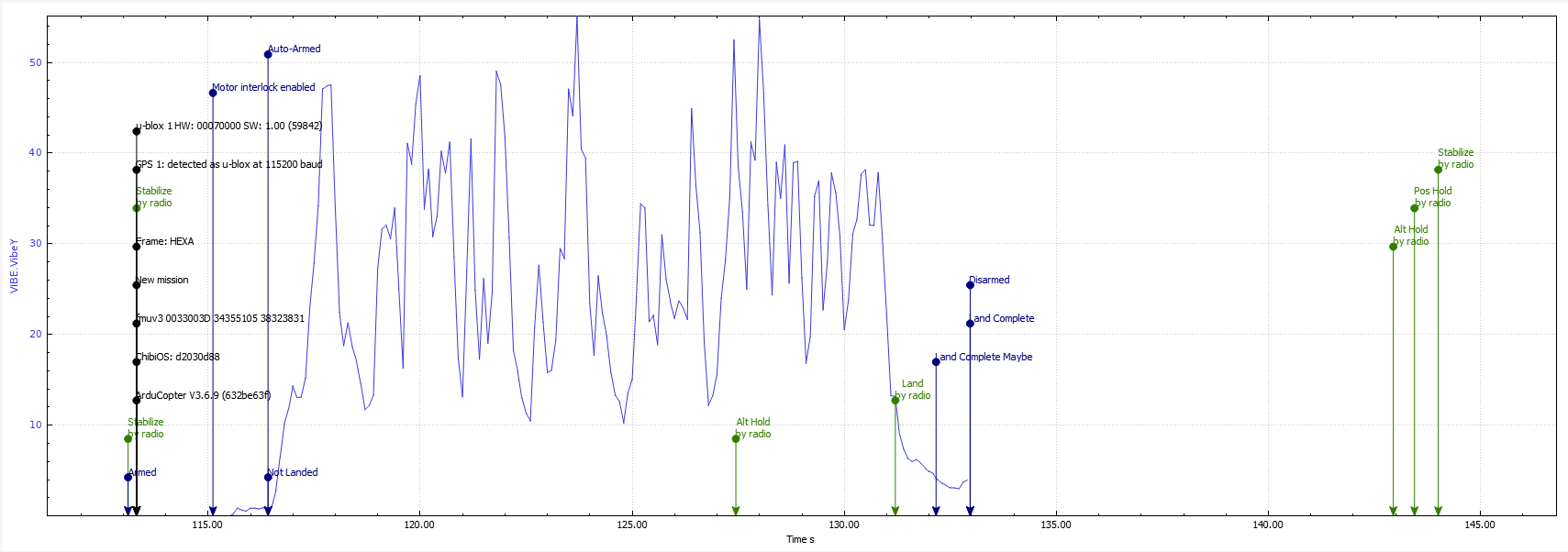
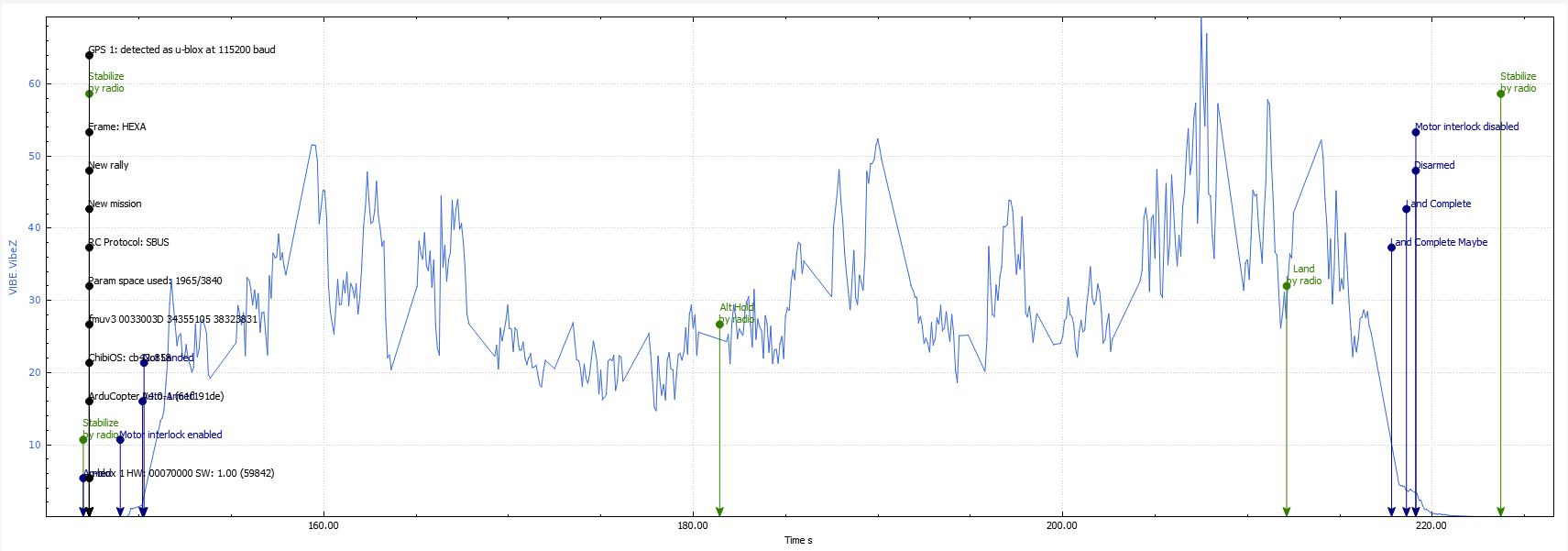
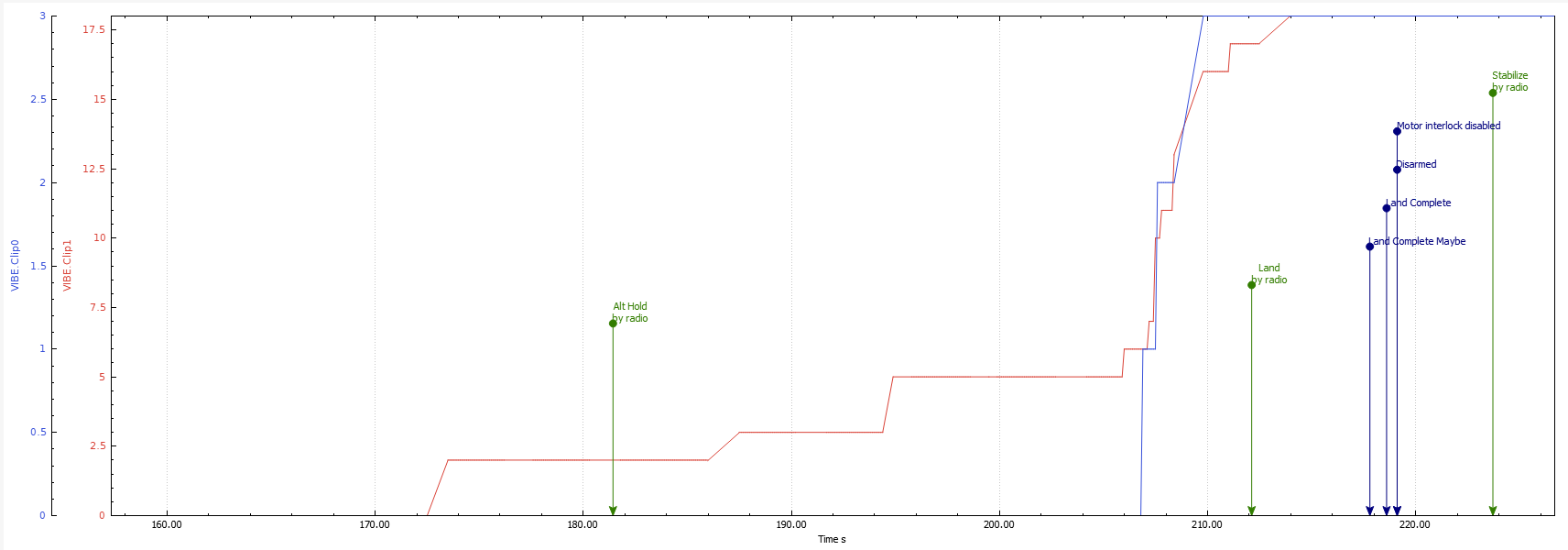
I know also that there is vibration *(considering that I flow in a very windy and abit rainy day!
because before I did not have vibration more than 30 %.
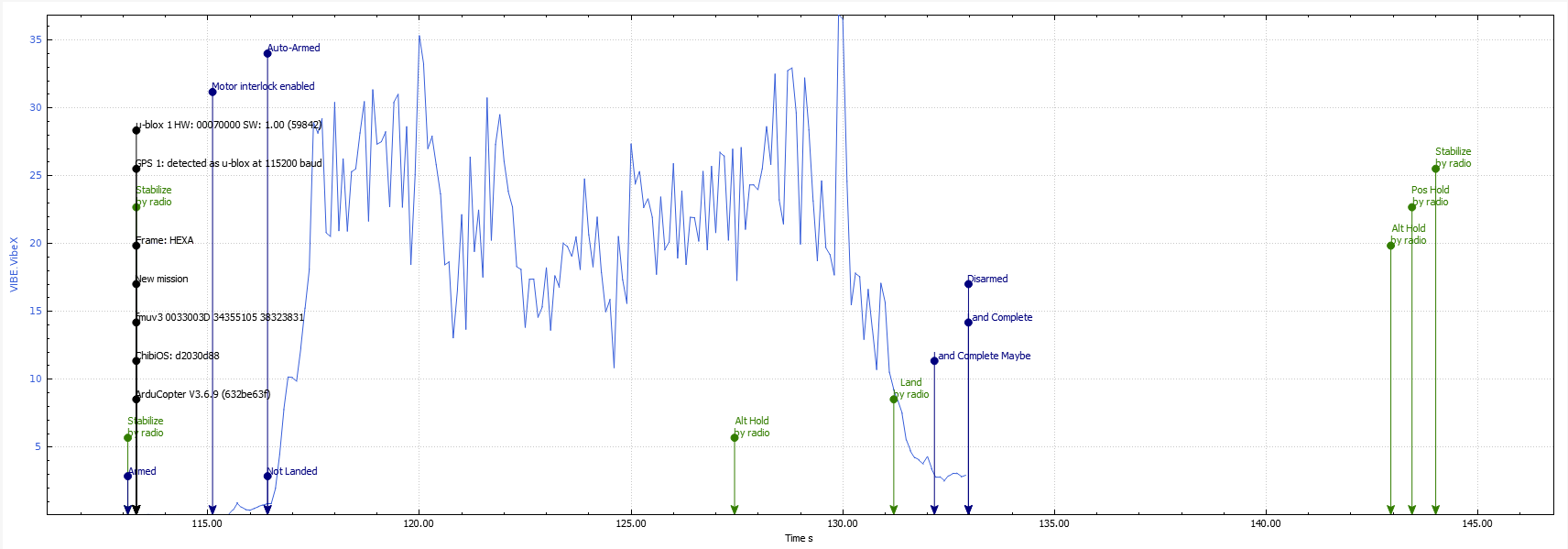
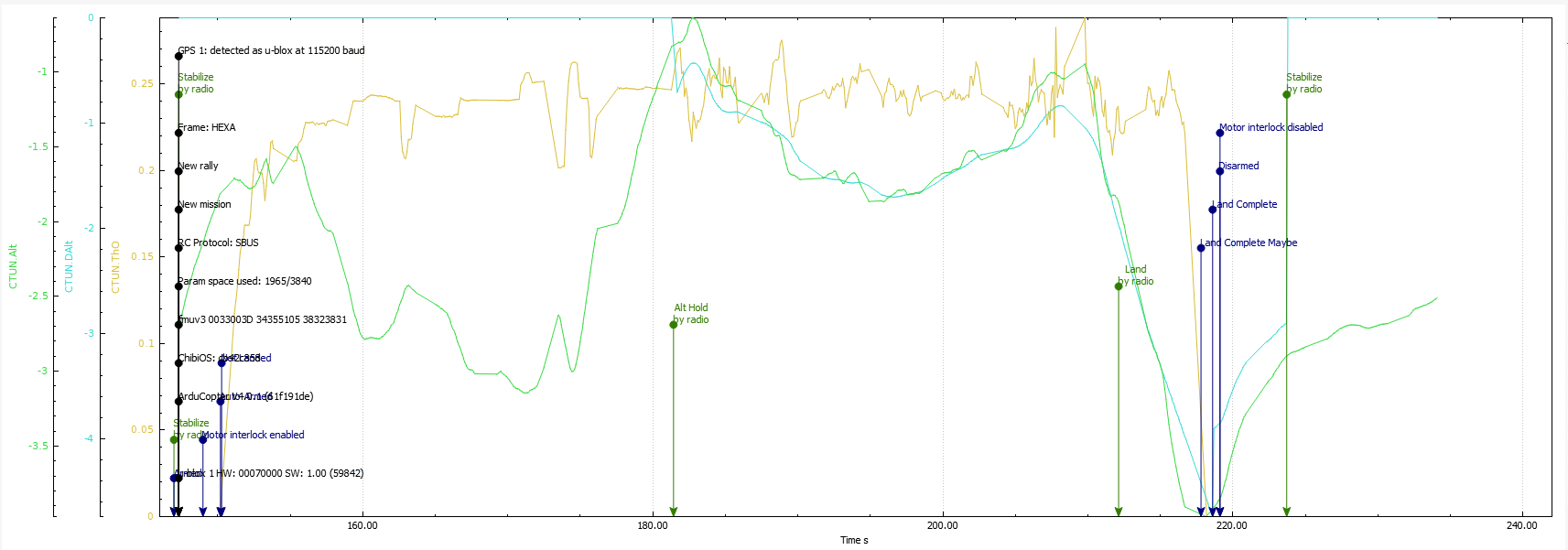
totally to finding an under power you should check 3 parameters under CTUN section
parameters are
ALT = real altitude
DALT = desired altitude
THO = throttle out
so if THO was maxed, then copter loosed altitude or can’t hold ALT same as DALT its meaning that your copter was underpowered
I think your problem is the high vibrations. Put a anti vibration support to the FC and you will be good. Vibs over 30 are bad, and I can see 50 or 60…