I arm quad in AltHold mode, then I raise throttle a bit (less then middle), it starts to fly stable but around 1m altitude. I want to increase altitude and as soon as I go slightly over middle, it goes up rapidly (around 10 m/s). I lower throttle fully, nothing happens and then I usually quickly disarm and and drone falls.
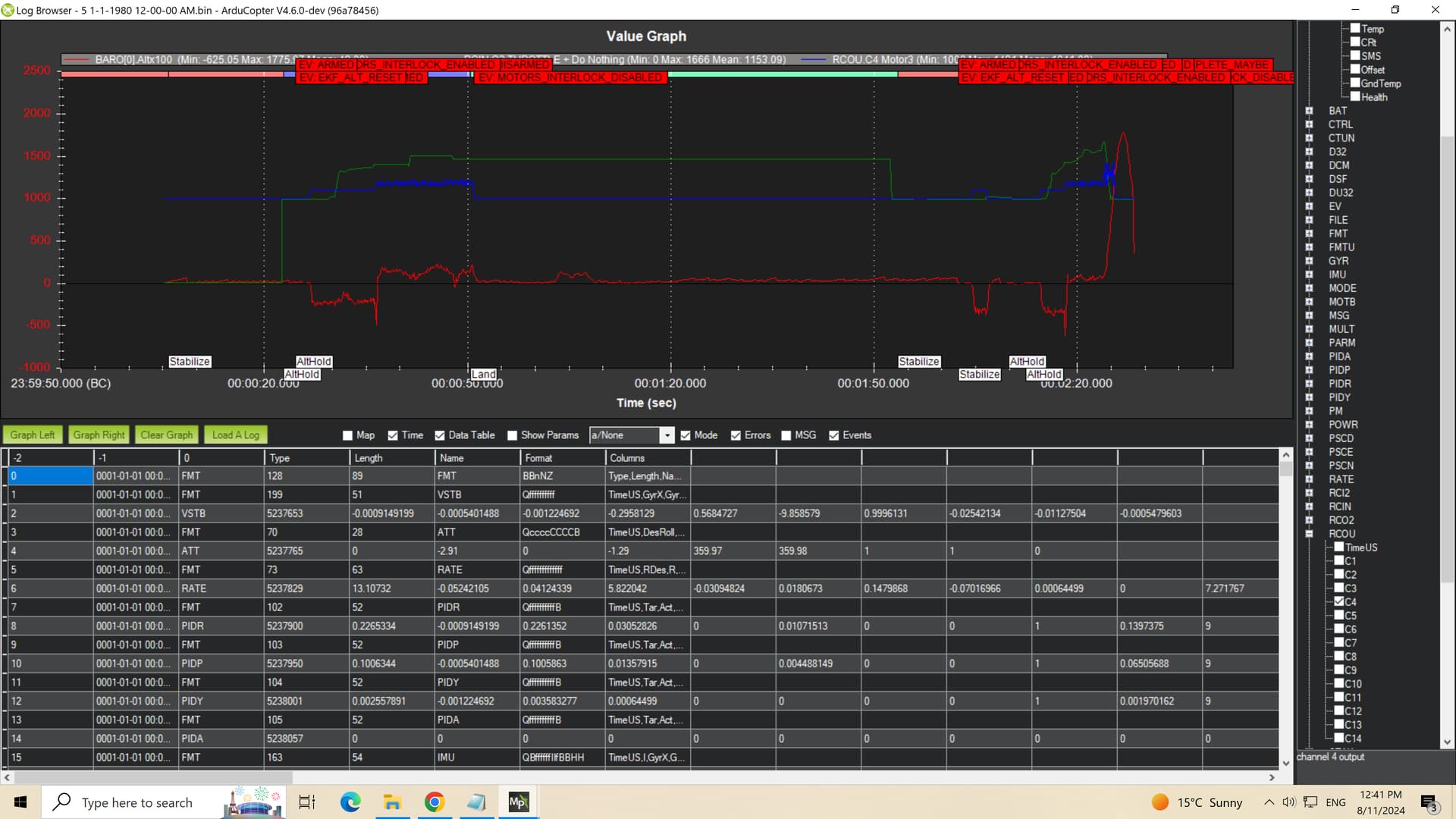
See screenshot (only last part, after 2:00)
Red - altitude * 100, Green - throttle, Blue - motor output
Parameters are default:
PILOT_ACCEL_Z=250
PILOT_SPEED_UP=250
PILOT_SPEED_DN=0
THR_DZ=100
I can decrease PILOT_SPEED_UP, PILOT_ACCEL_Z and try again but I want to understand the issue. As I had throttle around 650 and looking at this code ardupilot/ArduCopter/Attitude.cpp at master · ArduPilot/ardupilot · GitHub, I should have desired_rate = 250 * (650 - 600) * (1000 - 600) = 30. 30 cm/s while I had multiple meters / s.
You didnt set throttle parameters, they are at default. Set them per documentation. Check hover throttle in logs. Also all params are default, set notch filter and run auto tune after you set PSC_ACCZ_I to 2 x MOT_THST_HOVER
PSC_ACCZ_P to MOT_THST_HOVER.
Also set Initial params in Mission Planner and set properly Mot_spin_min and Mot_spin_arm
There is also a grear tool for setting up. Search forum for “ArduPilot methodic configurator” software.
Thanks Goran,
I actually did it partially before How to methodically configure and tune any ArduCopter but skipped a lot of steps as I thought they are not reauired for first flight in AltHold. I will do it again from scratch
After some careful test maneuvers switch to ALTHOLD and hover for 30 to 40 seconds one to two meters above the ground
I can’t hover, after drone starts to climb up, it goes up with the same speed even after I set throttle to minimum.
Let me remind you that it’s after 17_notch_filter_setup, so before 19_throttle_controller
Also I have not found in this instruction when I should set PSC_ACCZ_I to 2 x MOT_THST_HOVER and PSC_ACCZ_P to MOT_THST_HOVER.
However, I was able to do a Stabilize flight, which was pretty stable, so I believe my misconfiguration is in AltHold mode parameters, not in common flight parameters.
it turned out that my ESC doesn’t have telemetry, so I couldn’t configure notch_results.
After configuring throttle_controller, it became worse. In Stabilize mode it starts climb dangerously quickly even on little throttle. In Althold it remained the same, it climbs not so fast but after starting climbing never goes down even if throttle on zero.
I will buy other stack with more powerful FC MCU and ESC telemetry and try again with notch configuring. But I am sure that it’s not so important, it should be something very simple as in my case AltHold lacks even basic functionality of lowering drone.
The functionality is not missing at all, the real problem are the vibration levels, with very high vibration levels the ACC clips cause the drone to think it is falling from the sky, hence it climbs.
Correct the real source of your issue: reduce vibrations, get a stiffer frame, balance the props, etc