I’m having trouble with my drone. When I fly in stabilized mode, the altitude remains steady. However, when I switch to altitude hold or position hold, the altitude starts to drop, resulting in the drone rapidly gaining altitude. Additionally, I’m receiving a “terrain clamping offset” message. I spoke with my colleague, who suggested I cover the barometer with an open sponge. Despite trying this, I still received the same message. When I attempted to activate altitude hold mode, the drone rapidly ascended.below, mentioning the log file and video clip of flight
Hover throttle will set to 0.3
Motor hover learn 2
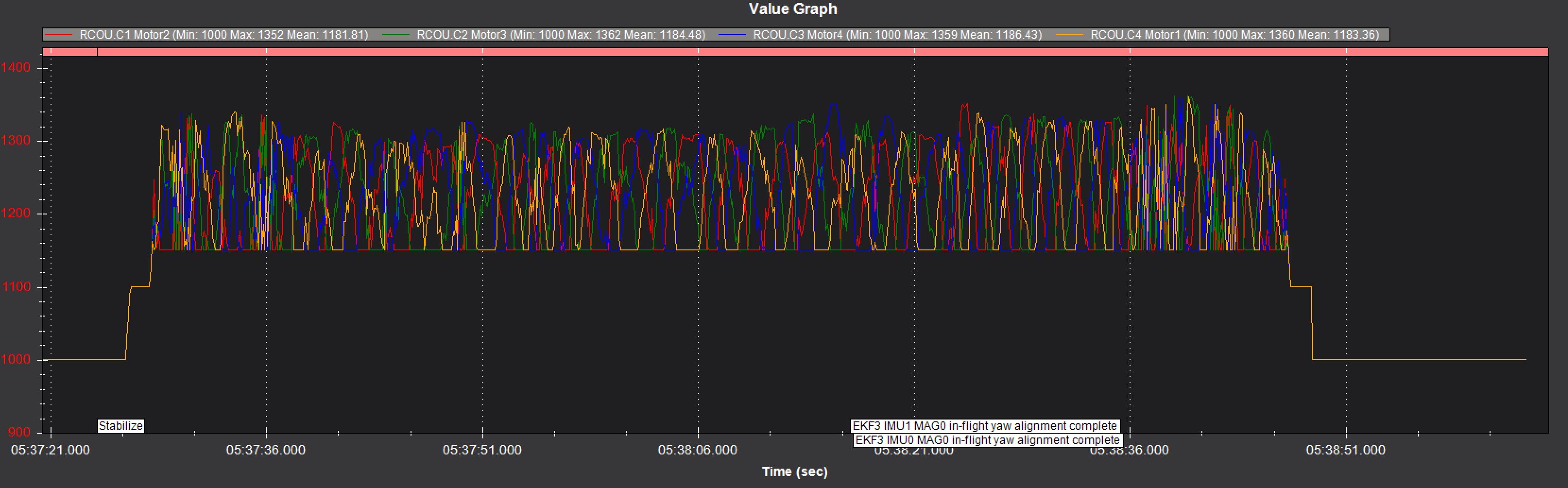
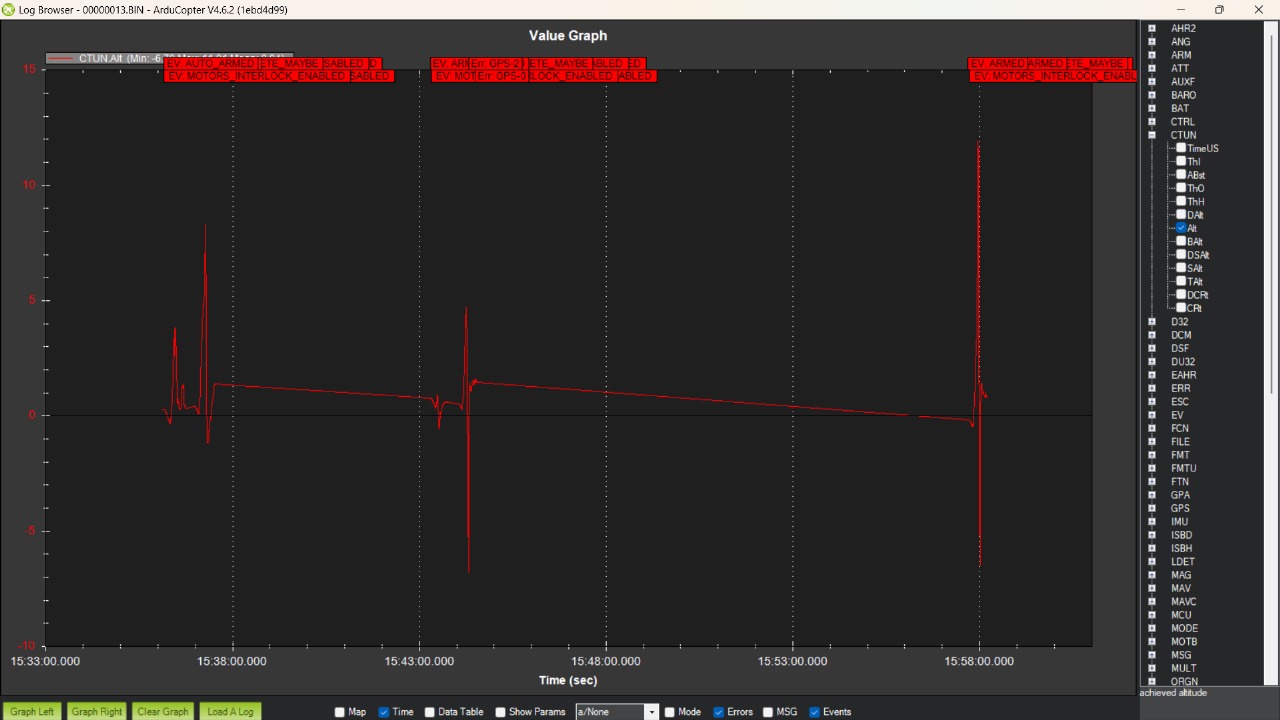
The altitude is not dropping, you have default parameters for the vertical acceleration controller gains with a hover thrust ~.02 (it’s hard to tell in this log). You also have default PID’s adding to the problem and resulting in nothing but oscillation on the outputs: