Thanks to the suggestions of some forum members I started the project to equip an Align T-Rex 500 DFC helicopter with a FC Arducopter.
Align T-Rex 500 DFC helicopter
FC Mantek H743 Wing V3
GNSS Mantek M8Q 5883
FrSky Archer RS receiver
FrSky Taranis qx7 remote control accst
First question. What to use to install the FC on the side of the helicopter to reduce the transmission of vibrations?
Thank you
@Brighela i am currently equipping a Trex 500 with a flight controller. I can show you how I am going about it. Do you have an enclosure for your Matek board. I am not familiar as to whether they come with an enclosure or is it just the open board. All of my installs use flight controllers that are enclosed in a case
They are not in an enclosure but the construction is 3 boards with the IMUs on the middle board that sites on silicon through bolt dampers sandwiched between the PDB on the bottom and just a label/shielding board on top.
I have been working on setting a T-Rex470lp with the same board and am also wondering if it needs more outside vibration isolation or not. This board fits on the normal gyro shelf on the 470 so I would think it would also fit there on the 500.
HI, @bnsgeyer I would be very grateful if you show me how you are doing. No, the card has no casing. She is naked as described by @spova. @spova I hadn’t thought of putting it in the normal gyro place; there I thought to put the GNSS. Where did you put the GNSS?
@spova So how do you plan on attaching it to the frame if the board don’t have a flat surface to use double sided foam tape on. With controllers that have a case, I just use a 3M foam mounting tape that is only 2mm thick. I have seen the multicopter mounts where they have posts that they screw the board to or some sort of suspension system.
Here is a video that I did for the wiki that shows how I planned to mount a flight controller on a Trex 500 and Trex 700.
The Matek Wing boards do have a flat surface. You can mount to that or thru vibration isolation grommets. The board with the IMU’s on it is mounted with those style grommets.
The only thing you have to consider really with these type of boards is putting foam over the baro.
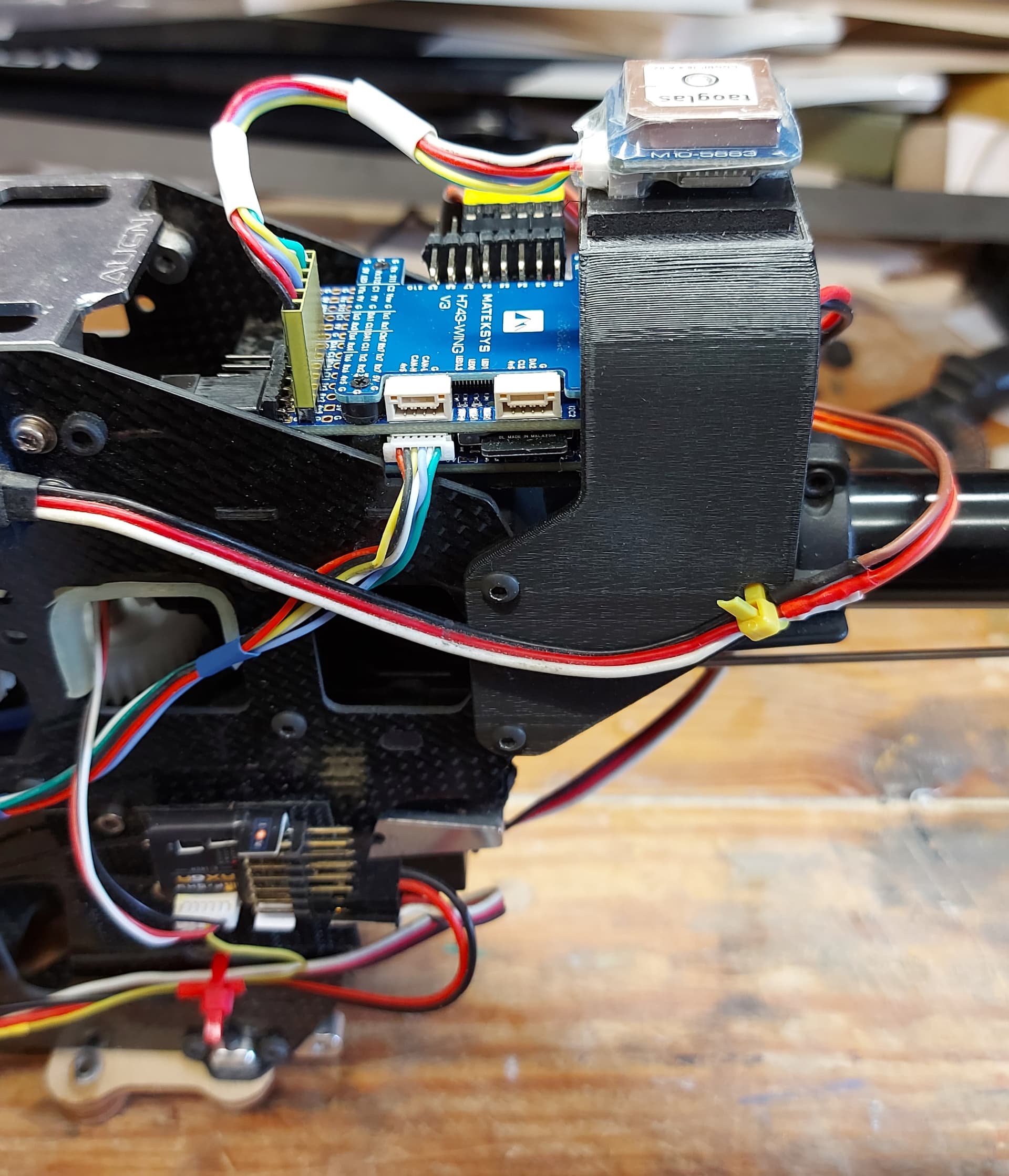
@Brighela I designed and printed a mount to go on the tail boom. I don’t know yet how good or bad of an idea this is as I have not finished this heli. Iv seen the GPS antenna mounted on the boom on other heli before though.
@bnsgeyer The Matek H743-wing stack is flat on the bottom of the bottom board so you could use mounting take on it like most FC. I’m not sure if that’s enough vibration isolation or not what paired with the silicone mounts in the stack though. Iv been thinking about printing some floating mounts for it but that would add a lot of bulk for where I am trying to put it on the 470l.
The H743-wing v3 or at least mine came with a little square of foam that get clamped over the baro when the stack is assembled. As long as you don’t loose it when you solder the boards…
I’ve got a Matek H743WING stack on my TRex 550. I’m a bit wary about mounting it on the side of the frame with anti-vibration tape, for when I did that with an H743MINI on my TRex 500 it fell off after a couple of test flights (while I was pre-flighting it). The H743WING is much heavier, so I feel that some more-positive fixing may be required.
On my 550 the 743WING fits on top of the tail boom gear casing, and my 743MINI fits in the same position on my 500. Each of them secured with 3M anti-vibration tape. I made 3D printed mounts for the GPS units on each of them, to fit within scale fuselages.
Note that the S1 output on the 743WING is physically separated from S2 - S10, so I reassigned my channels 1-8 to outputs S2 - S9 to keep them all together on a single 3-row pin header.
The picture below is of my 550 with the 743WING, but the 500 is the same layout with the 743MINI.
Not a trivial question. I learned the trick on this forum, but just now had to look back through my threads becasue I’d already forgotten .
Greg Gibbons told me:-
“For wiring convenience on the H743 V2 Wing, I set the servos to SERVO2_FUNCTION,31 SERVO3_FUNCTION,33 SERVO4_FUNCTION,34 SERVO5_FUNCTION,35 SERVO6_FUNCTION,36”
Good afternoon, I started the helicopter configuration, but I didn’t understand how to configure the H_RSC_MODE parameter. I don’t have an external governor.
Thanks for your help
If your ESC doesn’t have a built in Governor then you can use the throttle curve mode and if you have an RPM sensor then you can use the Governor mode. The Governor mode does use the throttle curve so you will have to tune the throttle curve to use the Governor.
I read the wiki page, but I don’t understand.
The helicopter mounts the original Align ESC for the T-Rex 500, but I don’t know if it has the integrated regulator.
If the heli is a recent one, the stock ESC supplied with it should be a Hobbywing one RC-BL80A (or maybe 100A), which has a built-in governor function. I would suggest you try to use that, for it will be easier than programming Arducopter’s governor function.
I guess so. But don’t take my word for it, I’m only a beginner to Ardupilot. Check out the wiki, and check out the Align/HW ESC manual for how to set the ESC’s governed speed.
I set “servo1_funcion”=31 as the command of the ESC is on “S1” and “ch8_option”=31 and on the radio the switch on channel 8, but when I activate the switch it remains “Motor Interlock Enable” and the helicopter does not arm itself. Where am I doing wrong?