The issue: in mission planner when I enable the airspeed sensor the ground speed value becomes identical to the airspeed value.
This is my first time using an airspeed sensor. As of now I am testing everything on the desk I did not go to the field yet.
My flight controller is pixhawk 2.4.8
My airspeed sensor is: PX4 Differential Airspeed Pitot Tube MS4525DO + Pitot Tube Airspeedometer Airspeed Sensor for Pixhawk PX4 Flight Controller
The airspeed reads correctly with default settings. When I blow in the tube it’s giving me correct values.
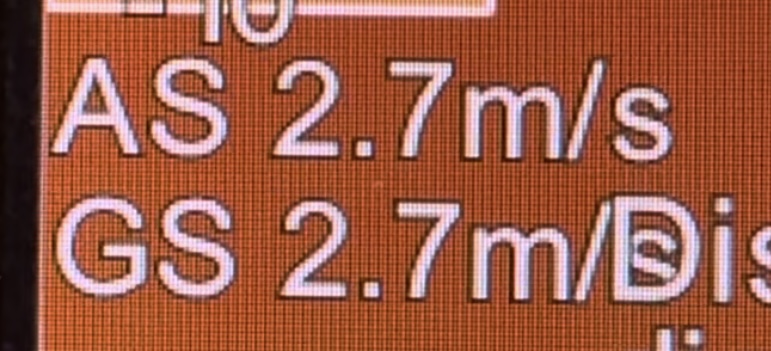
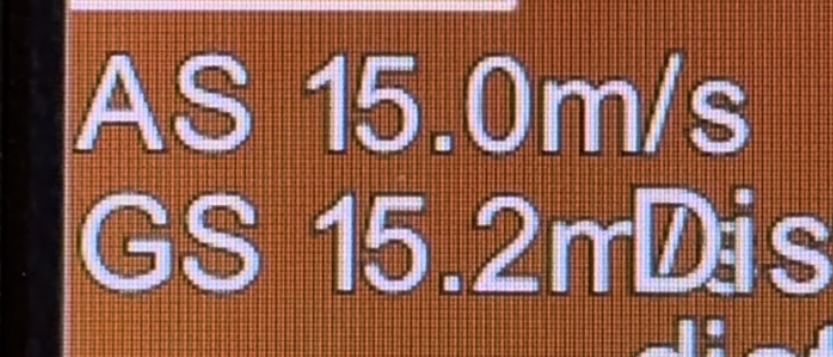
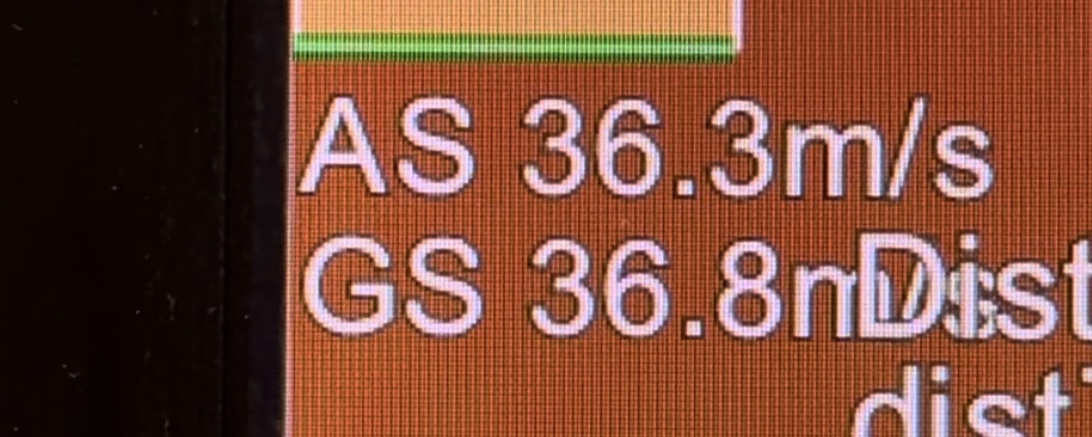
When I enable the use of airspeed sensor in mission planner the ground speed value become identical to airspeed. When I blow in the tube the ground speed also increases.
I would appreciate any help since I am new to airspeed sensors.
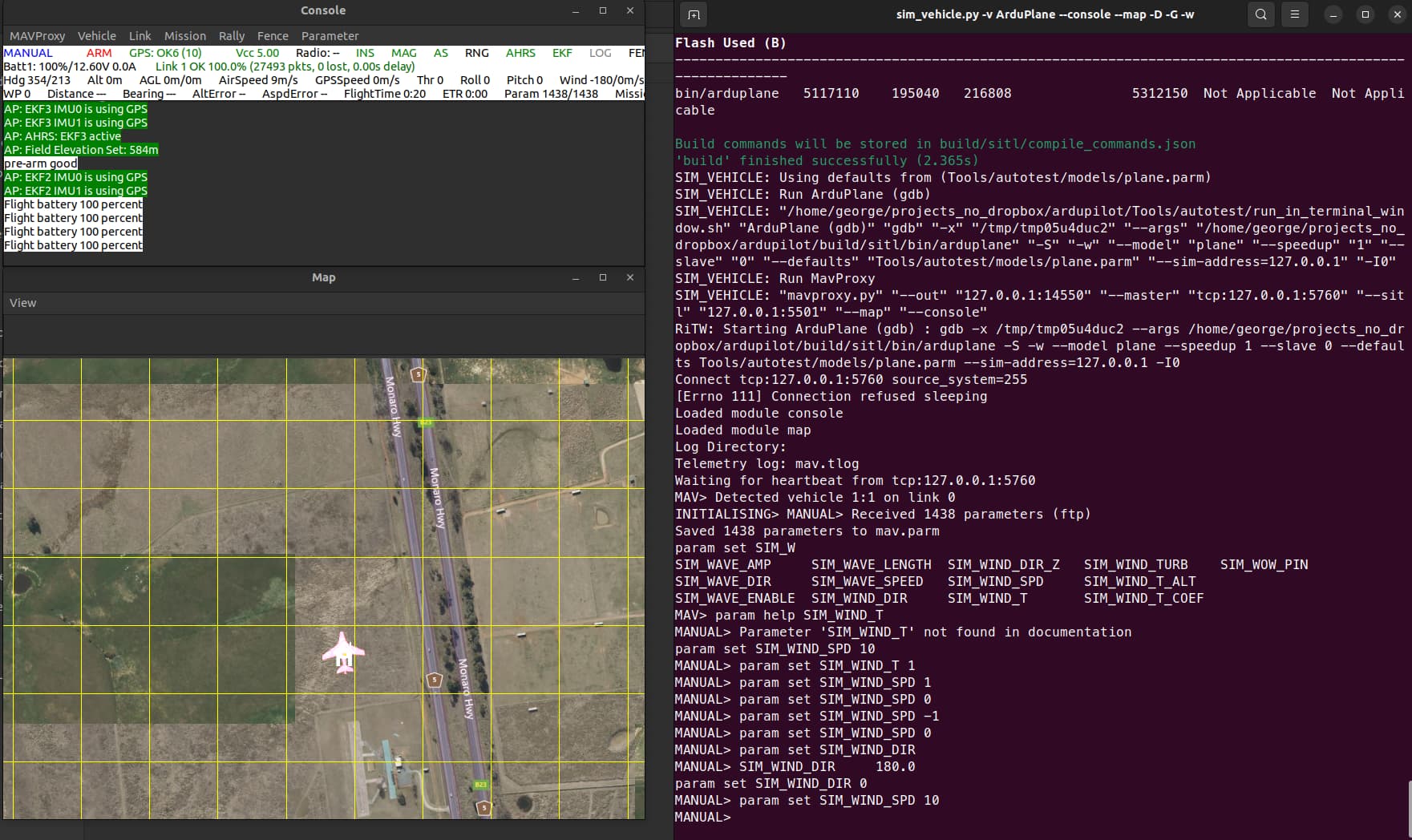
The ground speed doesn’t come straight from the GNSS receiver, but from the AHRS filters. These try to reconcile the airspeed readings and the GNSS readings.
Can you tell us a bit more about your setup?
Are you using GNSS receivers?
Was the vehicle armed when blowing into the tube?
My setup is basic. Pixhawk with the provided M8N with compass model. I am using a usb cable connected to my pc desktop to use mission planner.
The ground speed issue remains wither the vehicle is armed or disarmed.
There is an error massage when I connect to mission planner “ GPS 1 detected as u-box at 230400 baud “
Please note the the GPS compass is not plugged since I read that it is not mandatory. Plugging the compass using an i2c split board makes no difference regarding this groundspeed issue.
regarding the airspeed pin, I tried changing it to all of the ones in the list but has no affect in the issue. the groundspeed still moves with the airspeed as if they were the same value.
I did not manage to get a good GPS fix since I am using my desktop computer inside the house in a basement.
do you think Bad GPS fix is the reason for this issue? should I get a laptop and try it outside?
soon I will try I different airspeed sensor just to make sure that we are not dealing with a faulty airspeed sensor.
I seem to recall that once upon a time a manufacturer reversed two wires on a sensor and sent it out into the world. This seems to fit your problem to a T.
Don’t switch the power or ground wires of your gps module as it is getting power so it’s not those wires for sure.
I bet the clock and data wires are reversed on your gps module or your airspeed sensor, start with the airspeed sensor then gps module. Disconnect and uncheck the use of airspeed sensor and take your outside and see if your gps module works. Don’t go by the lights on the modules rather confirm via mission planner that you did or didn’t get a gos fix.
I was not aware that you could run 4.5 on a 2.4.8 Pixhawk as that pixhawk did not come with enough memory to hold that big of a firmware size but it’s possible someone upgraded the 2.4.8 as it is open source.
Regardless, upgrade your autopilot if and when you can as the 2.4.8, while cheap and an ok starting point, is no longer supported by the software gods and that very well could be your issue. If you want to test this idea look for the last firmware version posted for the 2,4,8 Pixhawk, it’s gonna be in the 2 or 3.0 versions but I’m not certain.