I recently attempted to start tuning my quadplane.
The first step was to calibrate the airspeed sensor. So I enabled arspd_autocal parameter and started my auto mission.
During vertical takeoff, my quadplane started moving backwards with the wind instead of vertically upwards.
At transition altitude, the quadplane turned away from the intended flight direction (towards first waypoint) and transitioned in the opposite direction. This was all very unstable flight. Eventually it turned and headed to the first waypoint.
But I felt the need to abort the flight and figure out the problem. So I switched to Q_hover to try and land the aircraft but the could not hold position. Then I switched to QRTL to try and land autonomously. Unfortunately, the flight ended in a crash.
Is there something additional that I should do in order to calibrate an airspeed sensor
The big problem with this flight is not with your airspeed sensor. The airspeed may well be bad, but the issues you have with other sensors are so overwhelming that the airspeed just doesn’t matter.
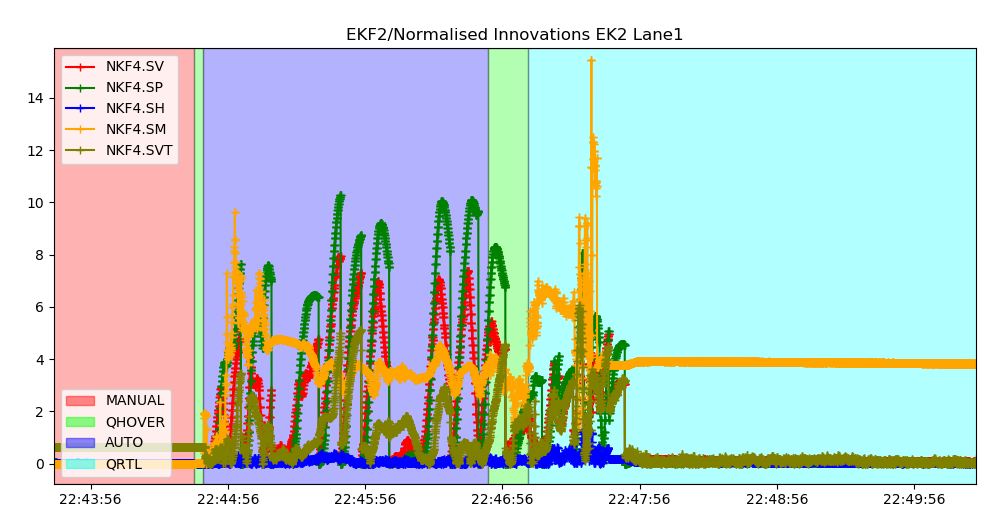
For a start your vibration levels are way too high:
in that graph any value above 1.0 means the sensor is not being used. So it means the EKF doesn’t know the position or velocity of your aircraft.
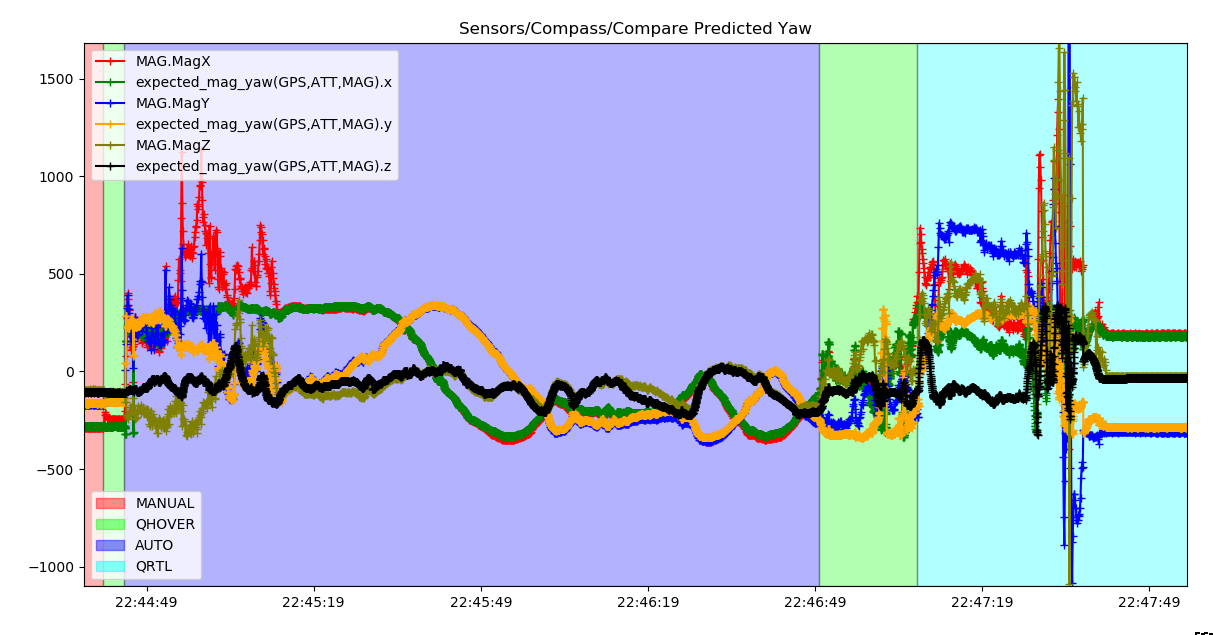
Your compass calibration is extremely bad, likely impacted by magnetic interference from the motors:
You also have a whole bunch of important arming checks disabled. Make sure you set ARMING_CHECK to 1 and fix the issues, don’t just disable checks.
Also please use either the current stable release (4.0.9) or the beta (4.1.0beta2 currently).
You have a lot of work to do on this aircraft before you make it safe to fly again.