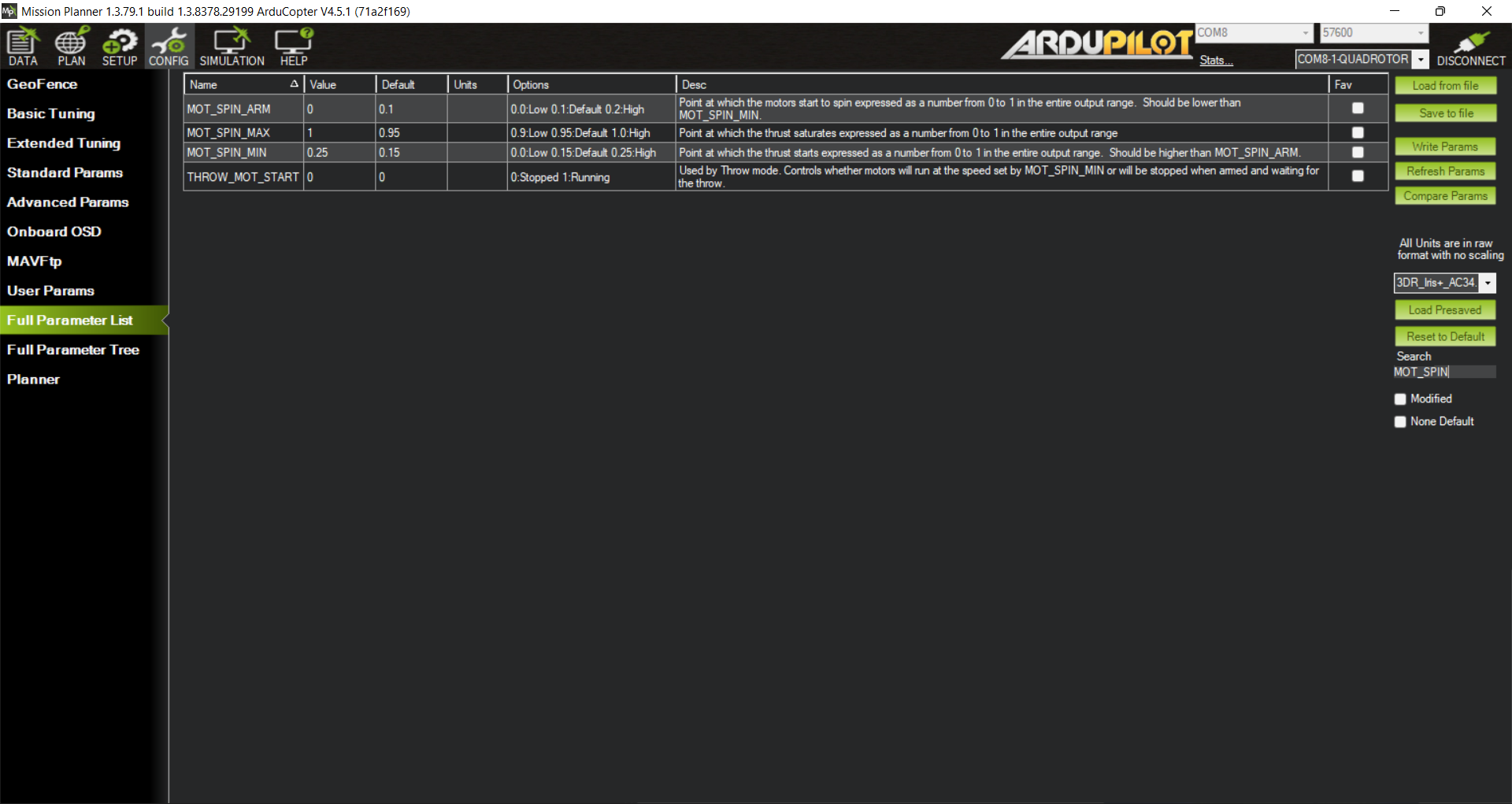
Calibrate the escs and tune the MOT PWM ARM and MIN parameters like explained above already
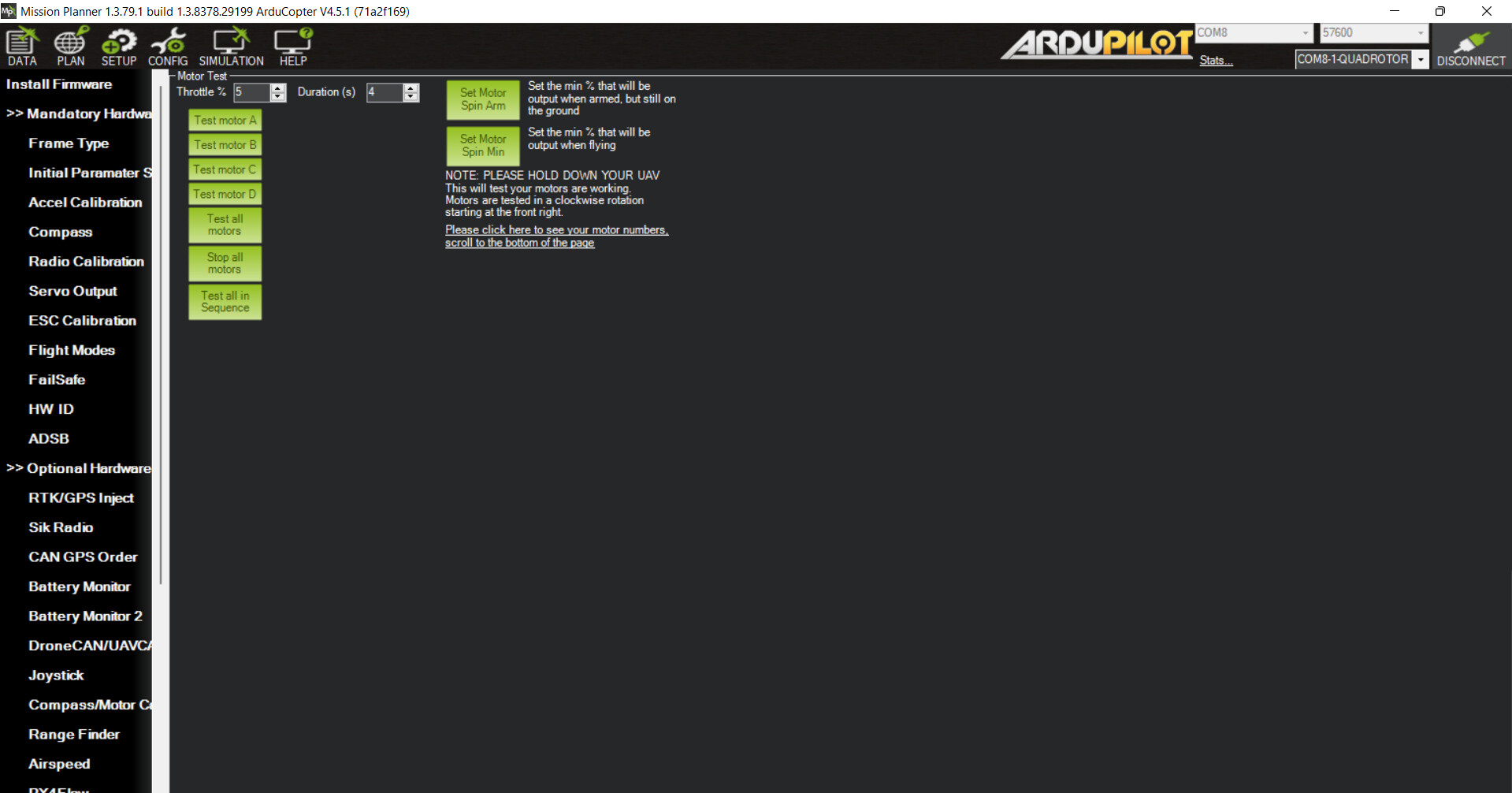
This is meaningless. What happens when you use use Motor Test in Mission Planner.
the result I get after making mot_spin_min is greater than mot_spin_arm.
I also recalibrated after changing the veliu
the speed of the motor is still not the same speed…what else should I do?
I have calibrated all esc, motor test, and many other things.
This is meaningless, again.
Run Motor Test. Do all Motors run properly with respect to the throttle %.
Put down the Transmitter and run Motor Test.
I have tried all the motors, and they can move at the same speed. but, when i use the rc remote, the motor does not turn at the same speed. Is there any setting I should try to change to fix this problem? clockwise and counterclockwise rotation of the motor is correct
Motor test looks promising.
How did you test before you did the motor test?
Did you test it on the bench without props?
Or did you try to fly it with props on and then noticed this issue?
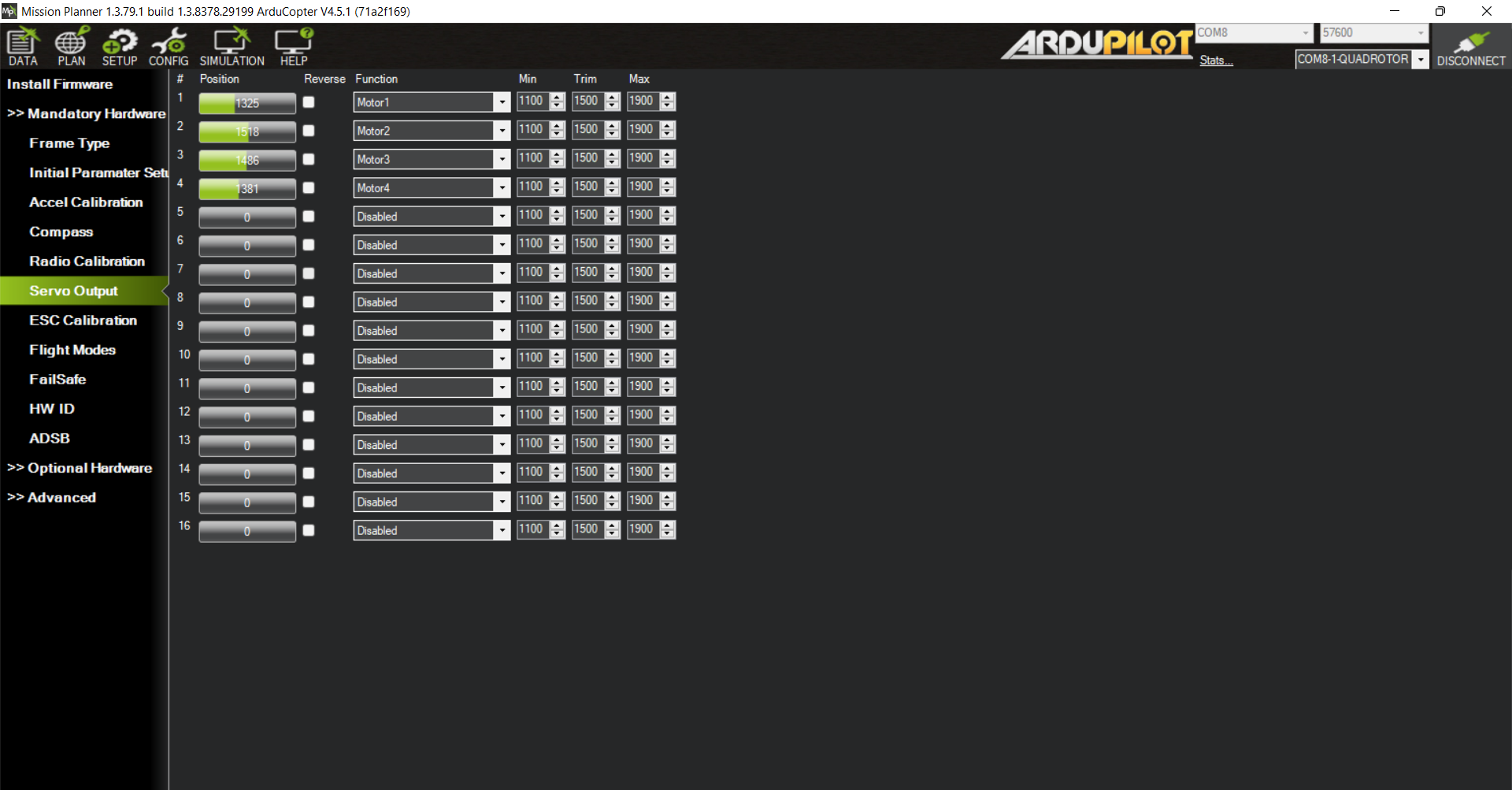
before I tried to install a fan on the drone. when I fly it it will flip to the side and cause the drone to fall. I looked again at the servo moto display and I found that when the throttle reaches half, the 2 motor speeds will drop. for components I think it is not a problem
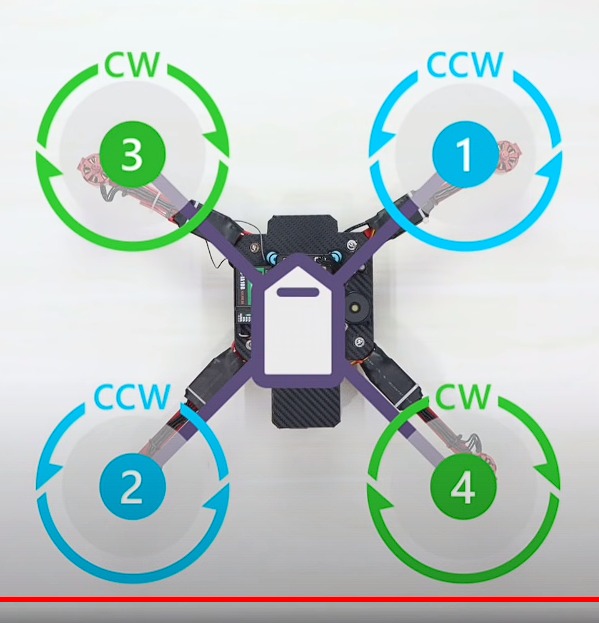
Sounds like the motor order is wrong.
Testing on the bench w/o props using the transmitter is meaningless. What you see on the servo output screen is normal.
These should run when you press the A-D buttons

1 Like

Directions look correct, but the order might be incorrect, and if any of the motors is spinning “backwards” it will also be incorrect!
Remember the correct order is ABCD, not 1,2,3,4