The HobbyZone AeroScout is a great entry RC plane, available in RTF and BNF versions, and is almost completely assembled . It also is a very nice platform for conversion to ArduPilot and I used it when experimenting with ArduPilot’s recent AutoLanding code improvements for writing the updated Wiki document on this feature (Automatic Landing — Plane documentation).
Its size and nice flight characteristics seemed to beg for a conversion to VTOL. I have done many such conversions in the past, being a QuadPlane lover. This is a step by step procedure. Currently, the build is almost complete and I will be adding to this as it finishes, along with a setup guide and tuning fllight results and information. So this document is a work in progress.

Overview
The conversion will be to a tilt-tricopter QuadPlane to minimize complexity and weight.
-
First, the existing receiver, ESC, and motor are removed from the fuselage.
-
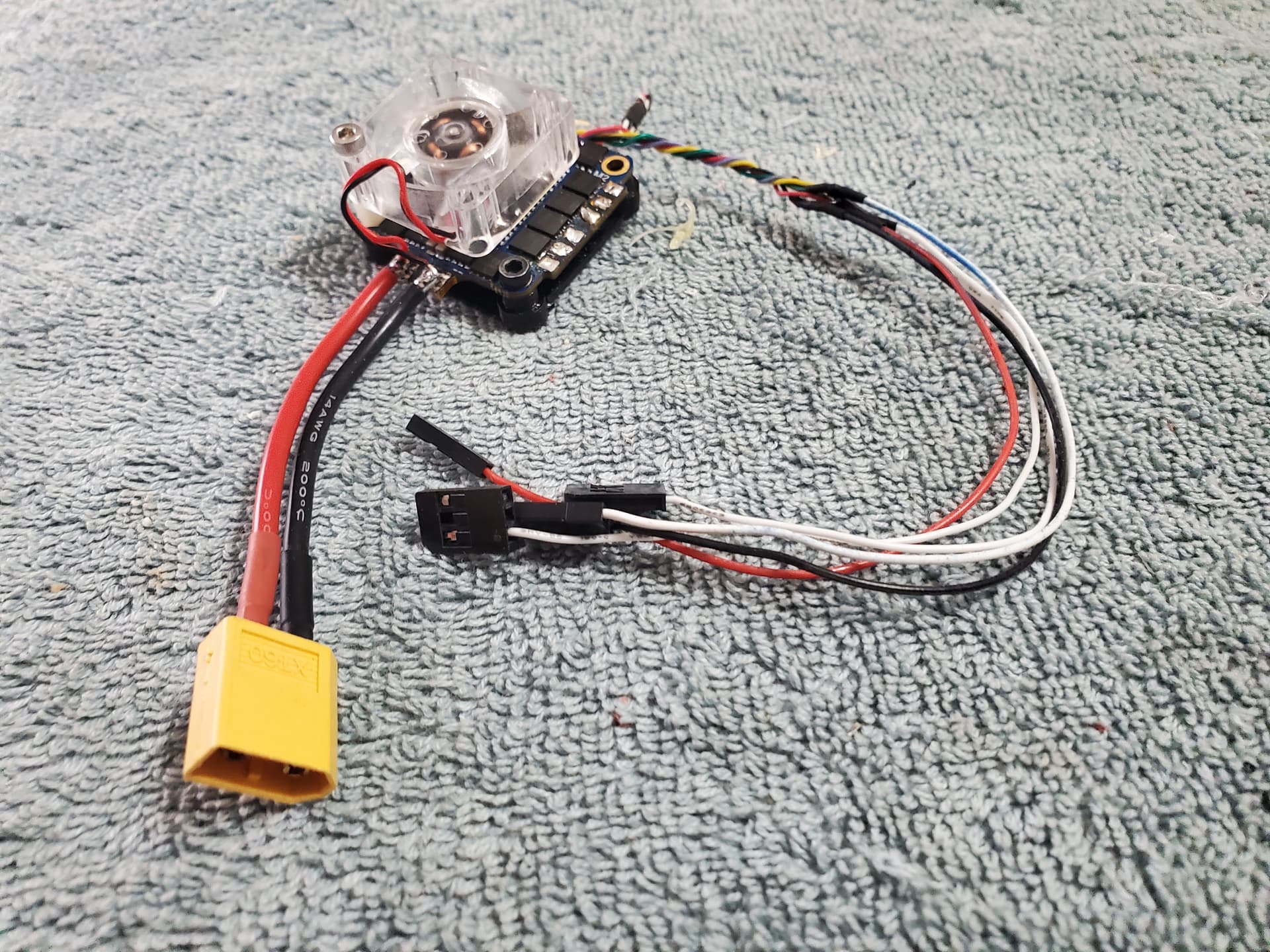
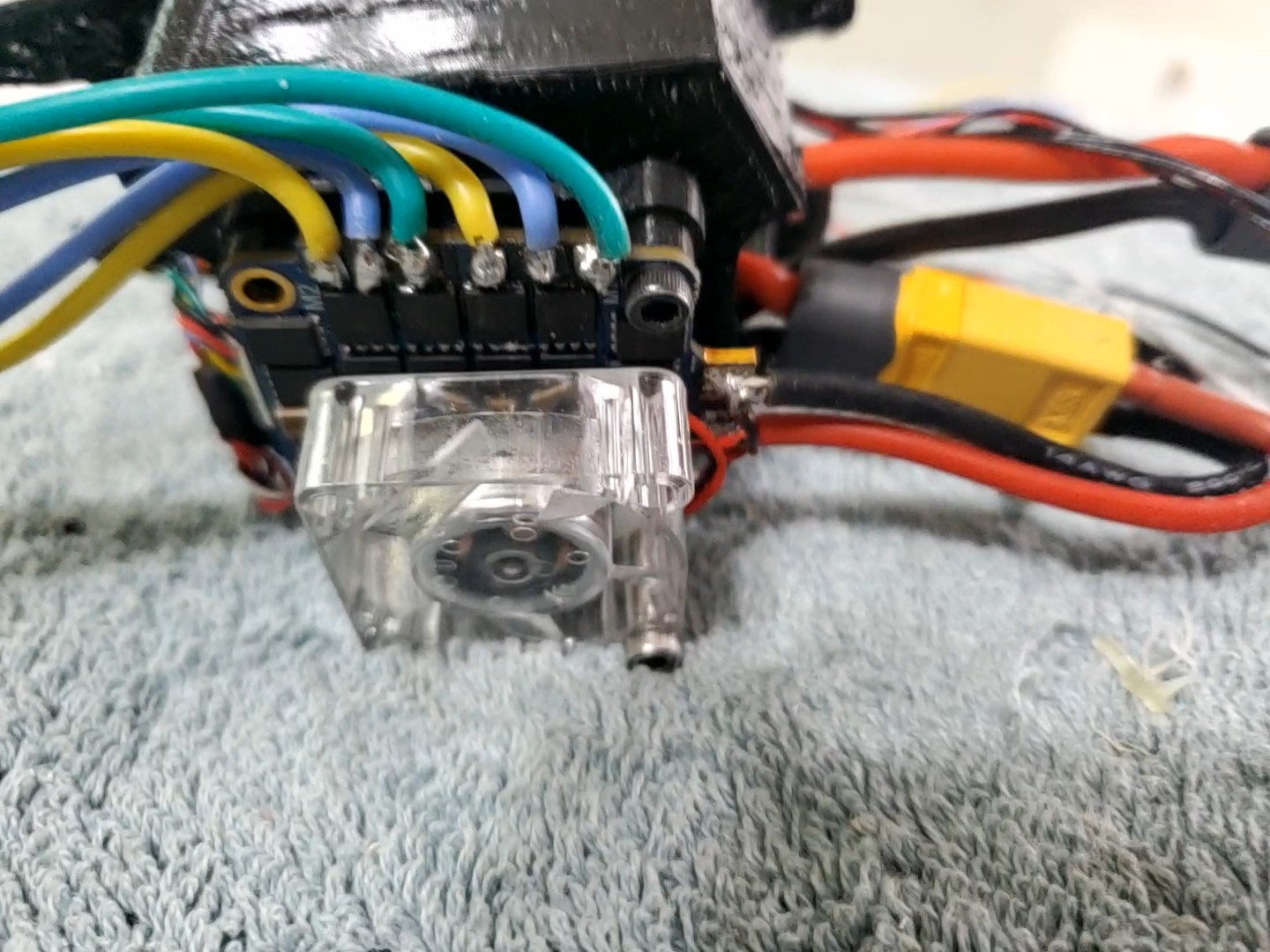
A 4in1 ESC is used inside the fuselage for the three motors. It will be attached underneath the new 3D printed electronics holder, along with a small 24V fan. I feared the internal placement would not provide sufficient cooling while hovering in Texas summer heat. I have done this on larger setups successfully.
-
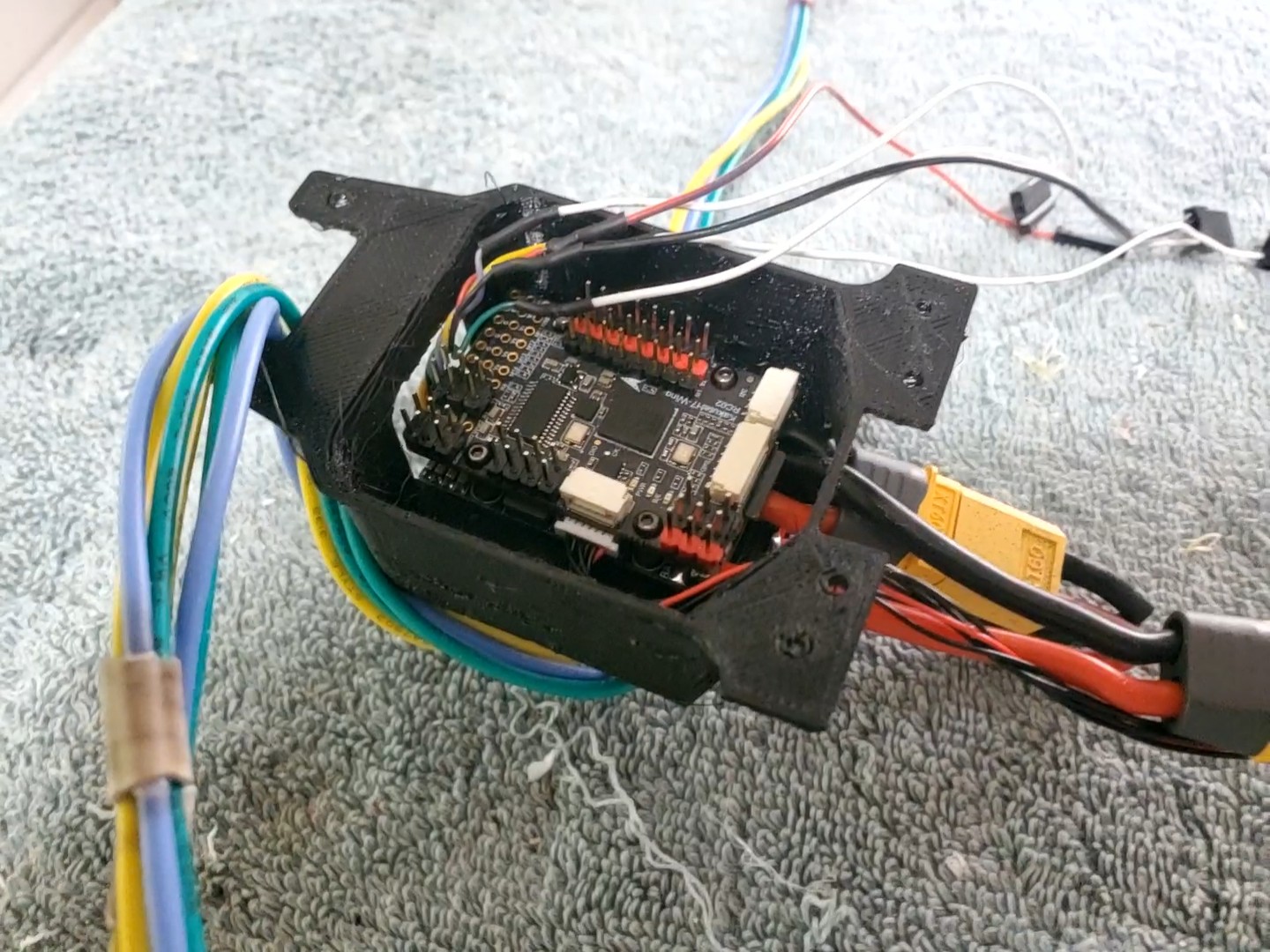
The electronics holder is completed with autopilot, ESC assembly including motor leads. The existing plywood deck must be partially cut out to allow its mounting.
-
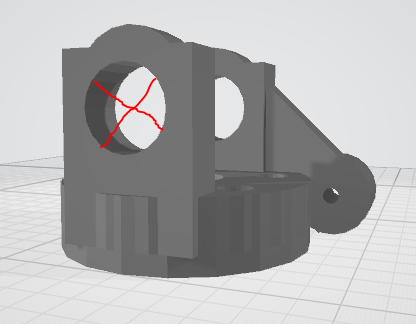
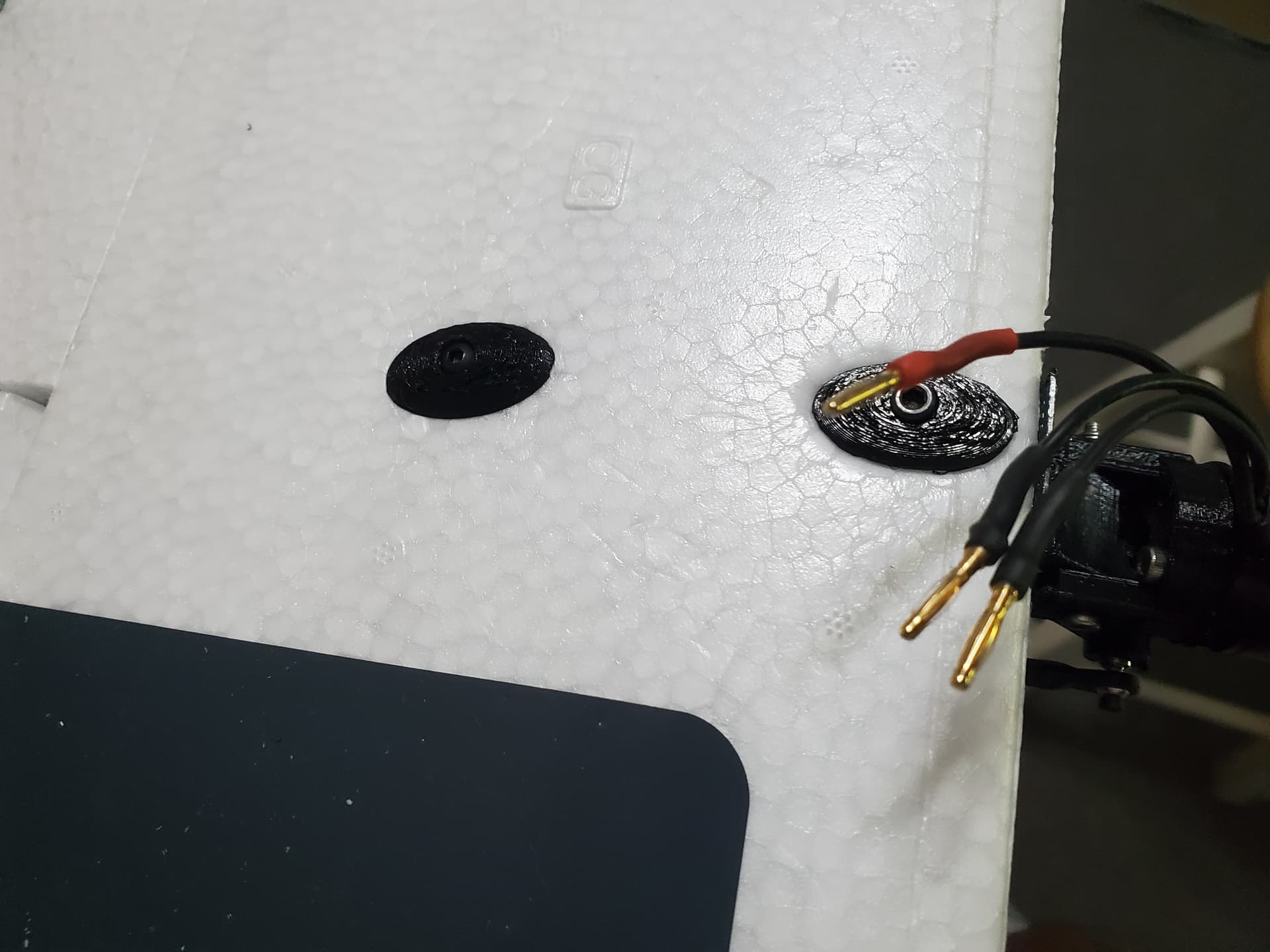
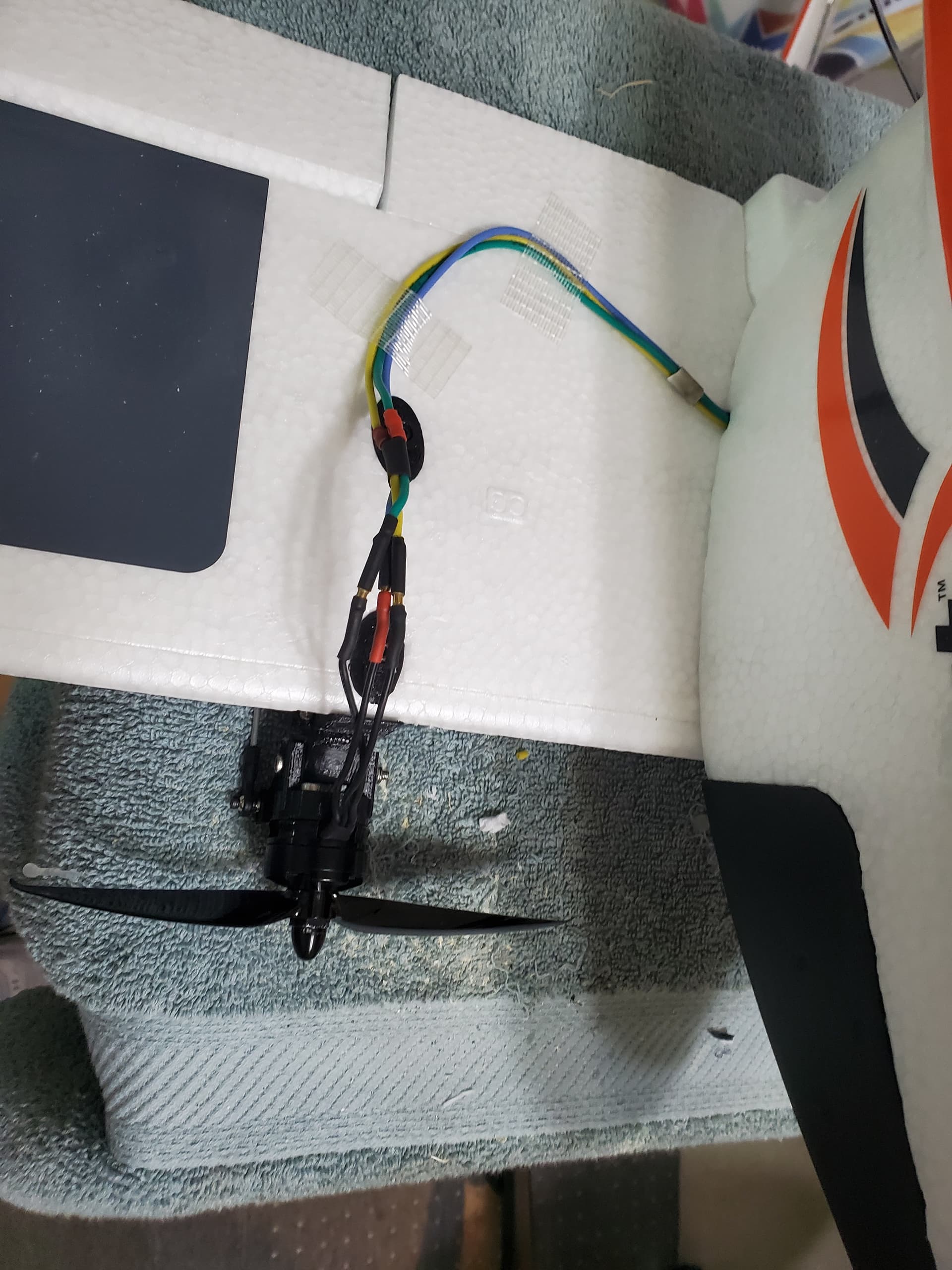
The wing motor mounts are assembled and attached to each wing on a line extending from the aileron start, the motor leads trimmed and motor connectors attached.
-
The elevators are attached normally, and the rear motor mount is assembled, its mounting location on the boom sanded a bit to flatten it for gluing. It is mounted 2X the distance from the CG as the two from motors hinge points. This will assure the load on the rear motor is the same as the two front motors in hover. Care in getting the mount level with wings and elevator is required. Its witing from the ESC is trimmed and motor connectors attached.
-
The GPS/Compass unit is mounted far back on the tail boom for distance from power interference and to help the CG.
-
The RC receiver is attached where to old motor was mounted.
-
The HD FPV camera unit will be attached using the front wing mounts on top of the wing after tuning flights are completed. I used this configuration on my other AeroScout with good video results (https://youtu.be/qTFfeMbvfck)
-
The landing will not be used to save weight and is not required anyway!
Equipment used:
-
Holybro KakuteH7-Wing (prototype unit I used to port the firmware). Any 8 output ArduPilot compatible autopilot with GPS/Compass port and additional UARTS for ESC telem and HD Video OSD. SD card highly recommended.
-
BE-880 M10N GPS/Compass
-
CRSF Nano RX
-
4S, 4200mah Molicell Liion (40A max)
-
2x ES09MD 9g metal gear servos for the tilts
-
3x 2204/2300KV motors (any 30g miniquad motor should do)
3x iFlight Xing-E PRO 2207 1800Kv Motor (require 16mm 3d mounts in the file below) -
Gemfan 7x3.5x3 Cinelifter prop
-
4in1 40A ESC with telemetry lead (again any 4in1 40A ESC should do)
-
24v 25 to 30mmx10mm 3D printer fan
-
HD FPV setup (optional)…I am using a Walksnail setup
3D printed parts: 3D design AeroScout VTOL | Tinkercad
Hardware for motor mounts:
-
4, 3x8x4mm 693ZZ ball bearings
-
2, 3x30mm bolts for motor hinges
-
2,3x35mm bolts for thru wing mounting
-
2,3x40mm bolts for thru wing mounting
-
2, 3x10mm bolts for rear motor mounts
-
6, 3mm motor mount bolts (depends on motor used)
-
18ga silicon wire for motor leads
-
3mm nylock nuts
Build Photos



CG
After the build the CG is spot on!. Adding the RX and HD setup should not change it much.
Weight turned out to be almost exactly the same as other AeroScout…maybe 10g heavier!
So performance should be great!
Parameter Setup
only the non-obvious tuning ones…you still must assign outputs, assign serial ports, etc. for your autopilot and peripherals…
current (9/4/23):
| Param | Value |
|---|---|
| FLIGHT_OPTIONS | 64 |
| INS_GYRO_FILTER | 80 |
| INS_HNTCH_ENABLE | 1 |
| INS_HNTCH_FREQ | 54 |
| INS_HNTCH_HMNCS | 9 |
| INS_HNTCH_OPTS | 16 |
| INS_LOG_BAT_MASK | 1 |
| INS_LOG_BAT_OPT | 4 |
| LIM_ROLL_CD | 5500 |
| PTCH2SRV_RMAX_DN | 120 |
| PTCH2SRV_RMAX_UP | 120 |
| PTCH2SRV_TCONST | 0.3 |
| PTCH_RATE_D | 0.006412 |
| PTCH_RATE_FLTD | 10 |
| PTCH_RATE_FLTT | 5.305164 |
| PTCH_RATE_P | 0.105929 |
| Q_ASSIST_SPEED | -1 |
| Q_A_RAT_PIT_FLTD | 40 |
| Q_A_RAT_PIT_FLTT | 40 |
| Q_A_RAT_PIT_I | 0.2 |
| Q_A_RAT_PIT_P | 0.2 |
| Q_A_RAT_RLL_D | 0.00288 |
| Q_A_RAT_RLL_FLTD | 40 |
| Q_A_RAT_RLL_FLTT | 40 |
| Q_A_RAT_RLL_I | 0.4 |
| Q_A_RAT_RLL_P | 0.4 |
| Q_A_RAT_YAW_D | 0.01 |
| Q_A_RAT_YAW_FLTD | 40 |
| Q_A_RAT_YAW_FLTE | 10 |
| Q_A_RAT_YAW_I | 0.05 |
| Q_A_RAT_YAW_P | 0.5 |
| Q_ENABLE | 1 |
| Q_FRAME_CLASS | 7 |
| Q_M_BAT_VOLT_MAX | 16.8 |
| Q_M_BAT_VOLT_MIN | 12.4 |
| Q_M_THST_HOVER | 0.55 |
| Q_M_YAW_HEADROOM | 200 |
| Q_OPTIONS | 1573921 |
| Q_TILT_ENABLE | 1 |
| Q_TILT_MASK | 3 |
| Q_TILT_TYPE | 2 |
| Q_TILT_YAW_ANGLE | 20 |
| Q_TRANSITION_MS | 3000 |
| Q_TRANS_FAIL | 3 |
| Q_TRIM_PITCH | -6 |
| RLL2SRV_RMAX | 75 |
| RLL_RATE_D | 0.00155 |
| RLL_RATE_FF | 0.125276 |
| RLL_RATE_FLTD | 10 |
| RLL_RATE_I | 0.087816 |
| RLL_RATE_P | 0.087816 |
| SERVO_AUTO_TRIM | 1 |
| TRIM_PITCH_CD | 100 |
Flight Tests and Tuning
First hovers underpowered with my junker miniquad motors…changed to motors listed…and 7in props…hovers acceptably, modest climb which is fine for me since I VTOL only to takeoff and land.
Set notch filters, tuned with QuickTune script. Discovered that script sets yaw FLTE too low resulting in 1hz oscillations. Raised it to 10hz and all is stable. Will run Autotune mode after forward flight tests to see if I can get even crisper tune. It’s solid enough for now.
First flights…here is a video showing the forward and back transitions at low altitude. Very flyable although more VTOL power would be appreciated…the fact that it can belly land (I took off the gear and did not install the nose gear) allows you to VTOL takeoff and fly till the battery is low and still land…if you want to end the flight in VTOL, don’t go past 50% on LiIon packs with these motors…or use a LiPo…