Hey Folks,
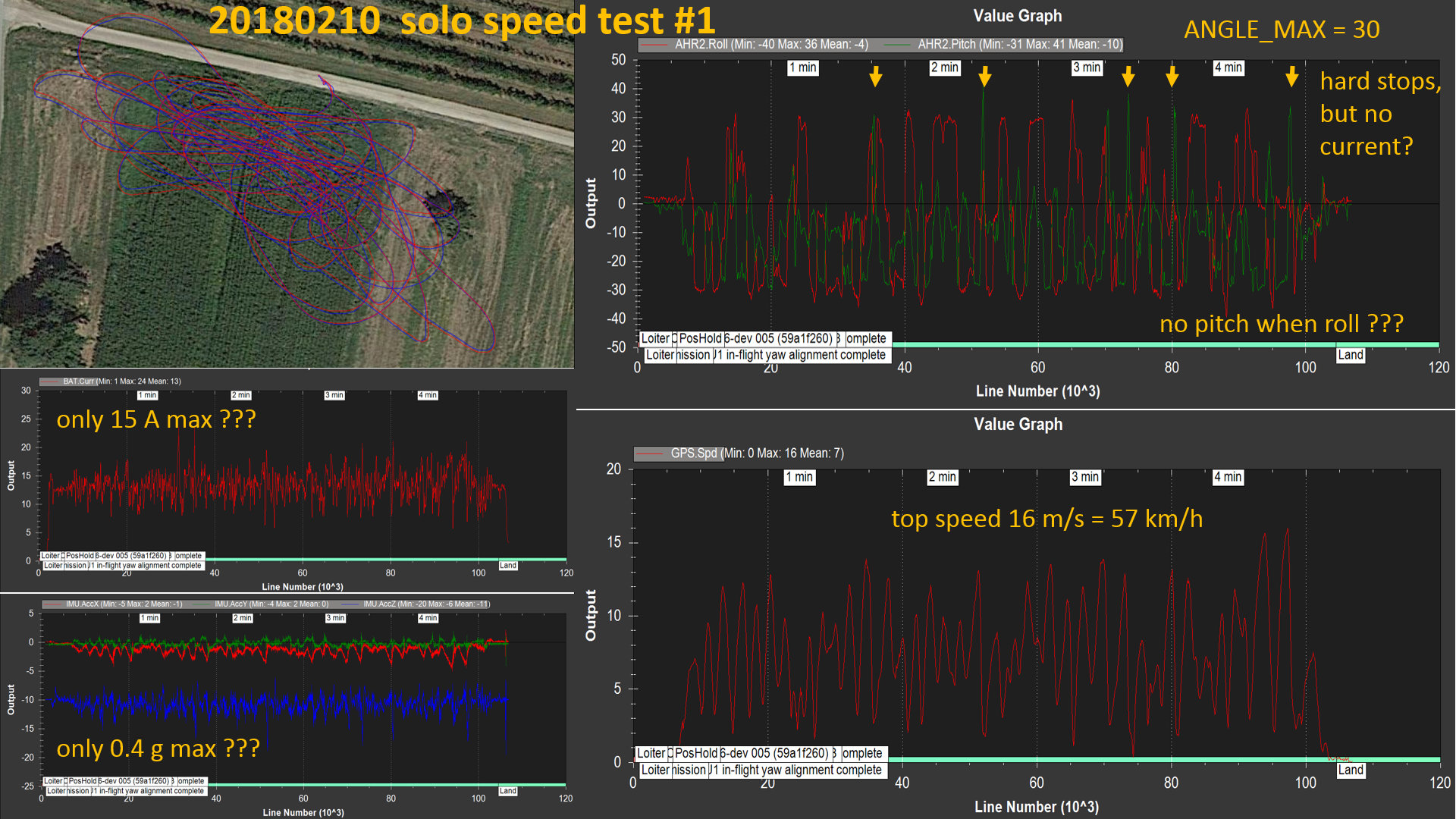
I today did a “speed” test with my Solo, and found that, somehow, I could not get fast turns, that is to keep on going at speed and yet be able to pull the Solo through a turn. Whenever I tried that, and rolled significantly, the pitch and thus the speed was gone.
This does not feel right at all !!!
(I’m coming from 3D helis and have an expectation for how it should feel then one goes through a turn at full speed)
To me it feels as if the MAX_ANGLE setting (30° here) is somehow a combined angle for pitch and yaw. I went through the params, but it wasn’t totally clear to me what to do. So, my question:
What parameter(s) do I have to tweak to get rid of that behavior?
EDIT: forgot to mention, flew with PosHold, if that matters.
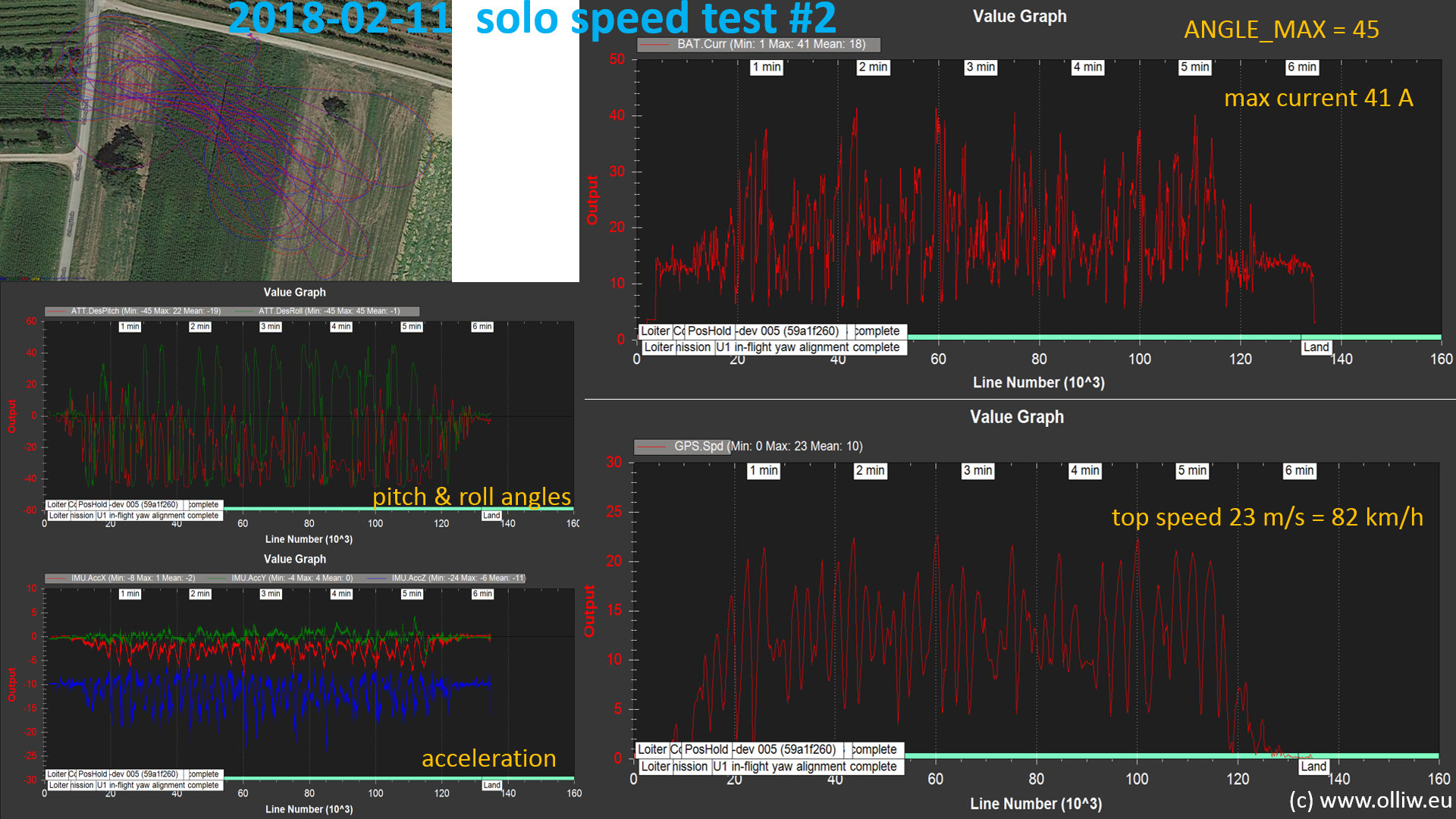
BTW: The Solo has the UC4H mod to the motorpods, and AC3.6-dev loaded. The test’s aim was to see if the UC4H mod works reliably, and as expected I couldn’t observe any issues. However, it seems that the speed test has not really stressed the Solo, so I need to do better (next time MAX_ANGLE = 45°).
Strangely, the currents did not went above hover-level !!! I doubt this can be right, even at full stops after full speed the current stays low. Is there something wrong with the Solo battery and AC3.6?.
Thx, Olli
PS: some pics with data of the flight