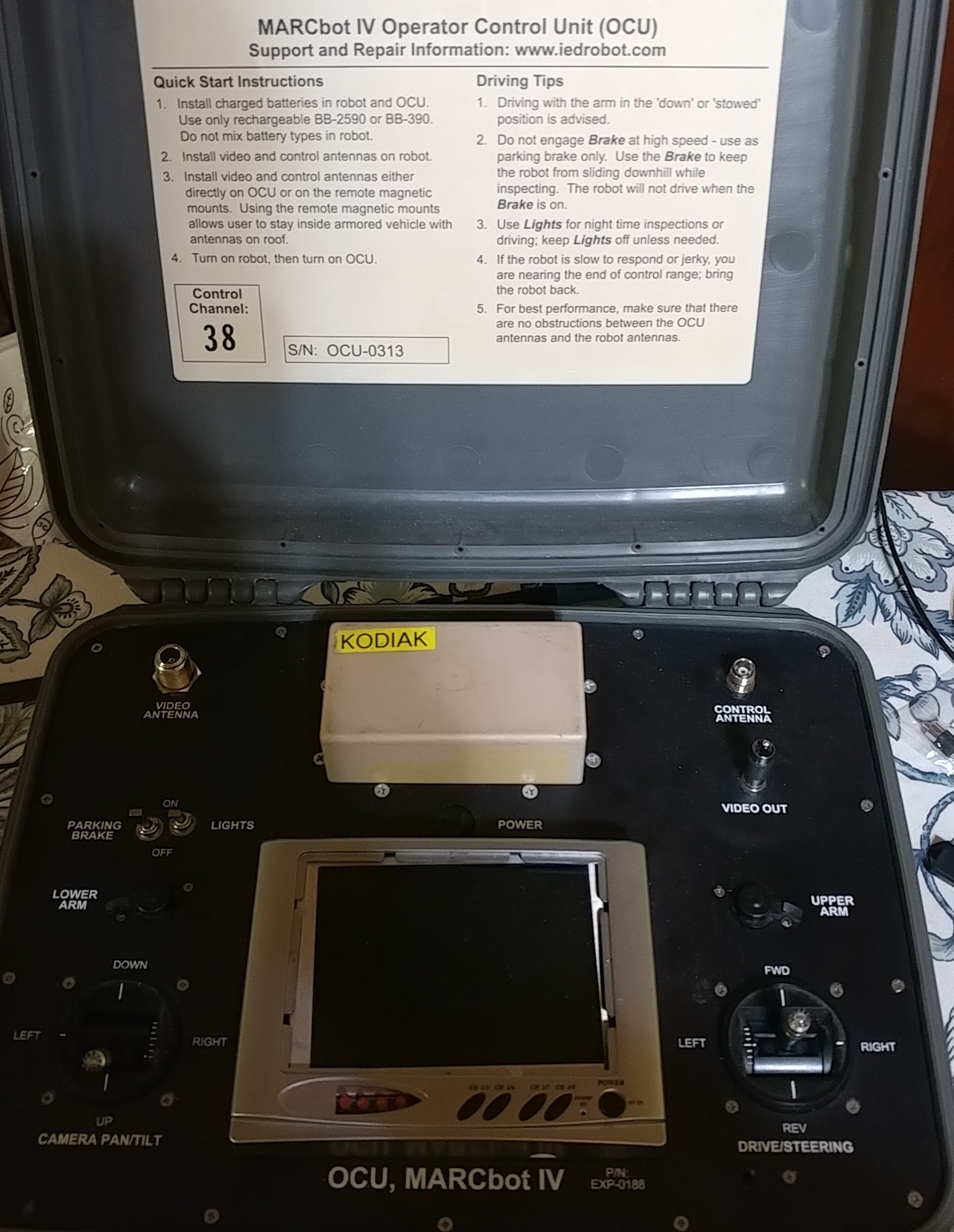
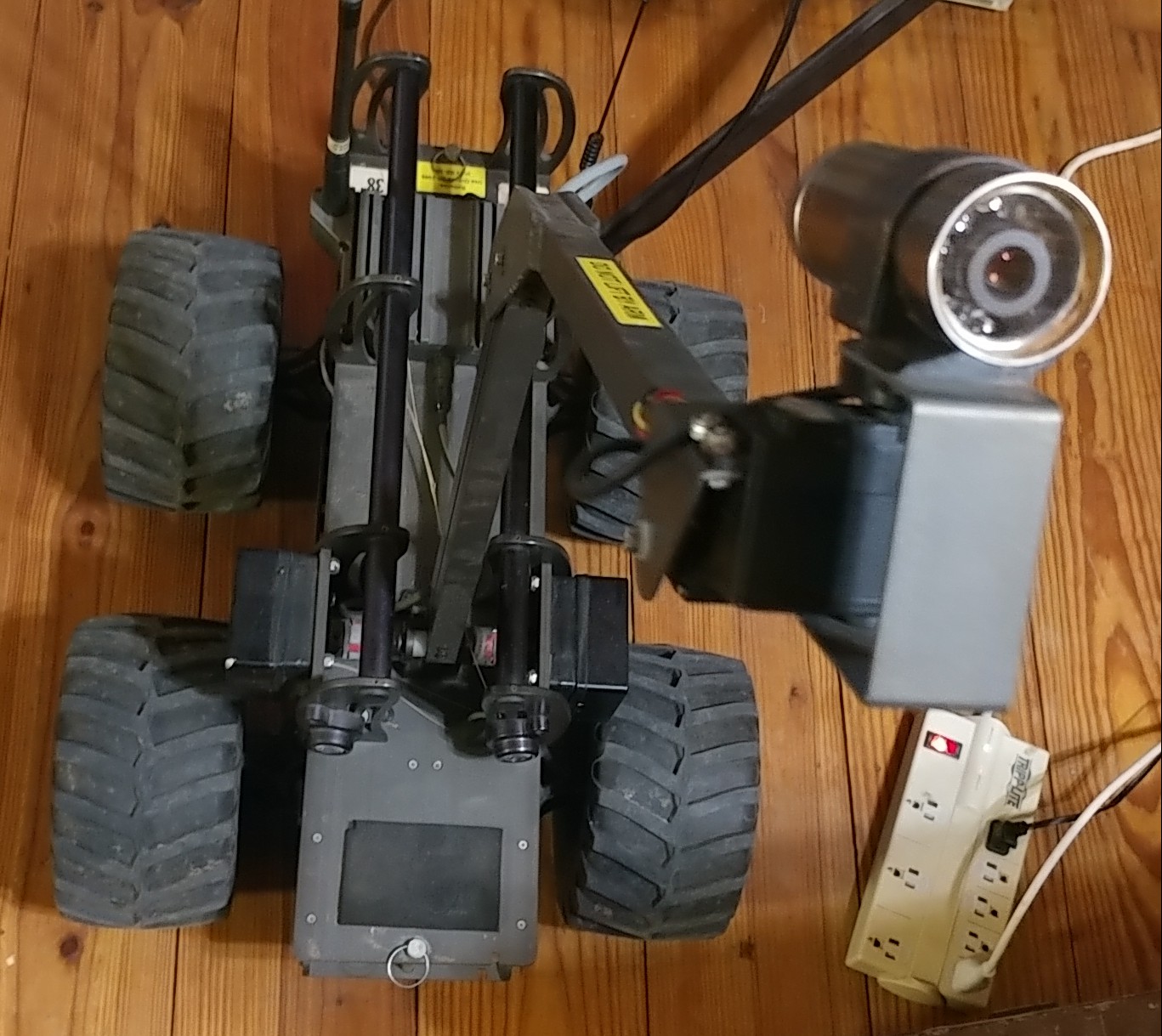
I am totally new to rc but have some robotics, linux, and programming experience. I also used to teach a grade school robotics class which I learned a lot from. I came across and acquired a fully functional marcbot iv. At a distance it looks like something complicated but it is basically a glorified rc truck on milspec batteries. As far as I can tell it uses an 9 channel system and has only one channel not in use.
Steering
Throttle
Lights
Parking brake
( empty? )
upper arm
lower arm
Camera pan
Camera tilt
In addition it has a fairly low res video on its own separate receiver antenna.
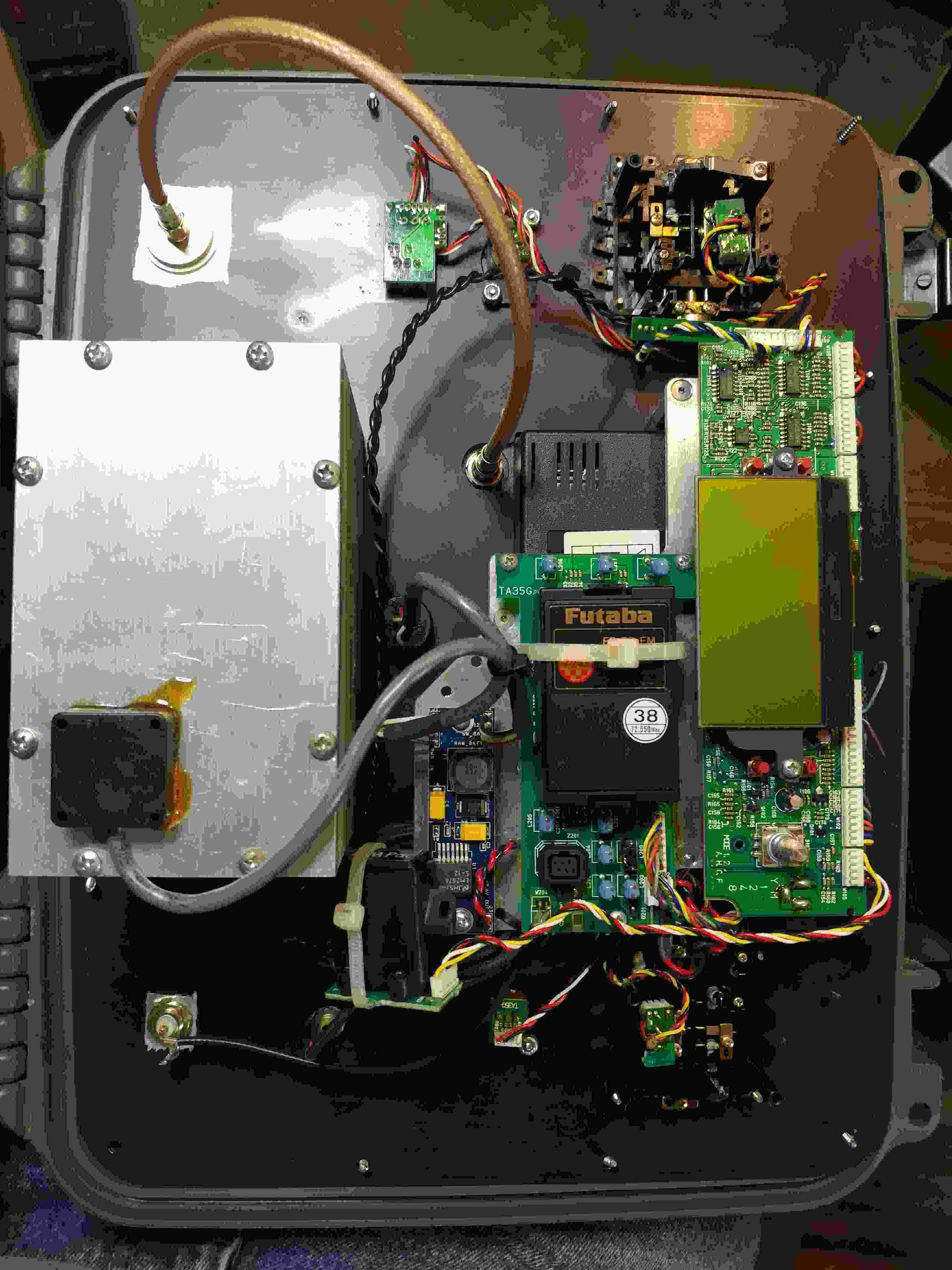
I believe the main receiver is 72 mhz with pcm and video not sure.
The robot uses 2 24v bb2590 batteries but somewhere in there it takes the voltage down to 15.4v and that goes the esc which is currently a traxxas 16.8v esc attached to a single 550 motor which drives a 4x4 gearbox.
Battery life is effectively a non issue as it has 6 hr drive time on these batteries. In fact the batteries are really the best part of the system it seems.
I have not been able to get an overall idea of what all I need to get this working on autopilot so I figured I would ask for some advice on what autopilot module would be best for this vehicle? I do not have a huge budget but do not mind saving up for the best fit if it is achievable.
That’s quite an impressive vehicle you have there. Is there any documentation indicating what the Receiver output protocol is? These signals would need to be connected to the Flight Controller which would then provide control signals to the drive and other components. How much package space is there for a Flight Controller? And when you say “not a huge budget” what price range would that be?
Thanks for your fast reply. I had this photo handy from when i took apart the vehicle…it looks like it says pcm 224 or something…is that the info needed or where should I look?
About budget, just the more it would cost the longer it will take me to complete it but I could spend 5 or 600 I think at the moment. Or wait a bit and save up more either way.
By package space, do mean like physical space on the robot? It had a lot of places to put stuff so I think I can squeeze stuff in several places. The aluminum chassis also seems easily extensible if I needed to attach brackets or something although I am trying to minimize irreversible structural changes but that goal is secondary.
Futaba PCM1024. A better photo of that would help. You will not be much limited in the Flight Controller and accessory components with that budget. Hex Cubes, a couple different offerings from CUAV and Mrobotics would be good choices.
What drives the arm articulation? Motors or servos?
Sorry about the photo. I will get a better photo when I open it up again soon. That one I took when I had not a good angle.
The upper and lower arms are (apparently to me) large geared stepper motors and camera pan tilt is articulated by two typical servos. There is a custom board inside that I am pretty sure only interfaces with the steppers. Everything else seems to be straight from the futaba which would make sensed based on my limited understanding. I think the steppers may be the only real nonstandard rc thing on here.
Probably at least to start. Is there precedent for automated arm/camera usage for navigation? We dont drive with the arm up but often stop and look up and over tall grass to see if we can make it without getting stuck.
Main starter goal is to have it be able to run a plotted course for a patrol and would like to later use ROS/opencv to have it recognize and alert for suspicious objects or people.
So eventually I would want it to stop periodically and look up down all around automatically to take in data and send back snapshots of anything odd it found. Which I think I can handle that in ROS if i can get the rest working and not paint myself in a corner with inexperience.
I suppose it will. All modern Flight Controllers require PPM or Sbus input and that Receiver is probably too old for that. Some “seasoned” hobbyists familiar with the old 72Mhz stuff would know. So you may need an PWM to Sbus/PPM converter. Not a big deal.
Wondering if you’ve managed to get anywhere with this system. I also have a Marcbot. It’s a model IV. Not sure which you have. The Marcbot IV was quite a change, as I understand it.
Looking to convert mine to a more modern control system, since I don’t have the original control unit. I have experience with ardupilot. Thinking of changing it to a pixhawk rover, however the current control system and arm controls are very high quality and would like to retain whatever I can.
Just wanted to check in and see how you’ve gotten along on this. Don’t see many others around, unless it’s police or university.
Would very much like the to compare notes and information.
I haven’t been able to get back to this other than I lost the motor controller (quit functioning, the ESC thing) and successfully replaced it. In the process of diagnosing that, I found a loose cable that was preventing the parking break from working. I now have all features functioning, but was unable to figure out what the fried capacity on the board was supposed to be doing? I even emailed the original engineers who wanted to help me but corporate told them they couldn’t support it anymore.
I have a MARCBOT IV too. The controller I have is the original, not the ‘updated’ wifi. The original spec for the MARCBOT IV was it had to be deployable in under a minute…I am assuming that went out the window when they attached laptops to the controllers etc!
I can definitely send you some info on how the controller works since I have the functioning original controller. I think (fortunately for you) all the ‘brains’ behind the stepper motors in the robot itself, not in the controller. Controller appears to be a bunch of standard RC controller mechanisms put into an indestructable aluminum and plastic case.
I think their job as an IED robot explains why there are so few of them around for sure.
I have not really done much work on the MARCBOT since last year. Thought I’d check in to see if you have. I’m once again looking for a winter project and going to start to work through the system. I have the MARCBOT IV-N btw. It’s the one that was changed for possible use by NASA also. The boards look quite a bit different. I think I have the laptop controlled unit.
Ok so based on my past research you must have a wifi communication system that uses a laptop’s wifi instead of regular RC controller. So shorter antenna’s on the robot, right?
The original spec of the MARCBOT was to be deployable in under 1 minute which obviously is not possible if you are booting up a laptop but NASA wouldn’t had had that requirement so I guess that worked for them. Do you have a photo of your board in the robot? I would be surprised if they replaced the whole control board just to make it wifi-controlled…in my past robotics classes we commonly took RC controlled boards and spliced in an arduino right into the rc inputs (can’t recall exactly how we did that but a few google searches was all it took for me to get the info on how to do it). It seems it would have been a total waste of money to replace the whole board with another (what would have had to have been a custom-built) board.
Are the boards different because there’s like an attachment or addition to the original board or does it look like a totally different board?
Another long time before replying. Back at it again for the fall and winter. I actually didn’t even get to it the past 2 years, surprisingly.
so, I’ll get the Marcbot out and photograph the boards in the very near future. Hopefully you are still around to compare. I plan to do something similar, since I don’t have the controller. I’ll add a Pixhawk and get this Rover thinking for itself
I’ll get some photos of the internals of my unit. There are a number of interesting boards in there, but seem to be custom, rather than off the shelf type of parts, unfortunately. It’s gonna be tricky, for sure.
Someone is selling a RC for the IV-N on ebay for $1500. Still need to get an RC setup for my unit, but that price is just crazy.
Have you had any luck getting the stepper motors controlled for the arm? Hope to get that going in the near future. That, plus a Pixhawk rover conversion. I have some parts from 3DR Solo that just may do the trick. Using that, it should have 1080p monitoring. It’s gonna be some work, but should be doable.
I’ve never built a rover or land based RC, only flying stuff. Unsure what size motor and ESC would be needed for a model like this. It’s far larger than a typical 1/10 scale vehicle (I think). Would 1/8 scale drivetrain be suitable? Hopefully someone knows. Need to get that sorted first. I’d like to get some decent speed from it eventually. My goal is to create something like this https://www.bhphotovideo.com/c/product/1262069-REG/cinegears_3_074_steadyplus_yota_high_performance_gimbal.html
The arm would hold a small gimbal and camera. Vibration reduction is likely my biggest issue with this plan.
I am going to stay w/ the military batteries, I am going to switch from lithium to nickel or whatever the ones that work better in the cold. Mine just died so a good time to make the switch.