As I am new to servos in a “vehicle” context, I was wondering, if I set-up my servos for the task at hand, or adjust the numbers in the flight controller (config).
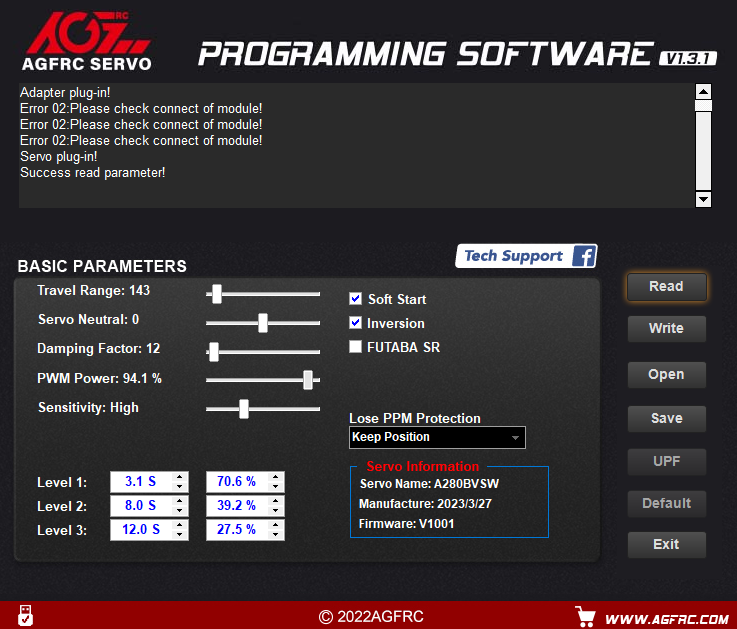
I have 12V servos from AGFRC for a rover I am putting together. These servos come with a USB programmer, allowing to change mid-point, and travel range, amongst other parameters.
The way I think about this is that I should adjust the travel range and mid point in the servo software, but with slightly grater travel range, and then adjust (‘trim’ the values in the flight controller config?!
The pwm limits and centre point etc are configurable in mp so im not sure why you would need to adjust them in the servo too.
The only time i have programmed servos is when i had limited number of chanels on a reciever and had servos on a y-lead. So sometimes you can reverse one and set the travels locally at the servo as both servos share one pwm. With a 16ch flight controller its tough to run out of configurable pwm outs!
If you have servo with more steps than there are in PWM signals it is beneficial to set limits on the servo it will also make the system more resistant to jitter in PWM signal.
For example if your servo has 4096 positions but FC can output 1000 discrete positions anything above ¼ servo range will benefit from keeping full PWM range and below ¼ servo range it will have less jitter if there is a noise or FC happens to hit an edge in measurement.
It was a thought… I 3D-printed the first set of servo brackets. These broke instantly after moving beyond the limit of hydro-stats being actuated. These 100 kg servos are quite powerful, and I thought I tame these before doing fine-tuning in MissionPlanner.
I also thought, now, that I have converted to steel brackets for the servos, to limit their movement will prevent the servos form accidentally running against the bracket and destroying themselves.