I would like to add support for LTA (lighter than air) aircraft for Ardupilot and need your assistance. In this thread I would like to gather informations and create a space for discussion about this topic.
@Gary_Mortimer you were involved in one uch project and it would be awesome if you can share some information
@tridge You are very familiar with the plane code, would be cool if you can assist
Things to consider:
LTA Aircraft have no potential energy and will not accelerate when pointing nose down
they can fly at any speed
Lift vector always points upwards, also in turns and when pitching an rolling
they need power for every maneuver, even to sink
there are lots of possible configurations and most of them feature thrust vectoring
there are aerodynamic forces proportional to acceleration called “added masses” which are different in every direction. Example: when accelerating forward the surrounding air is also accelerated backwards.
GOAL: Fully automatic flight of an blimp with ardupilot
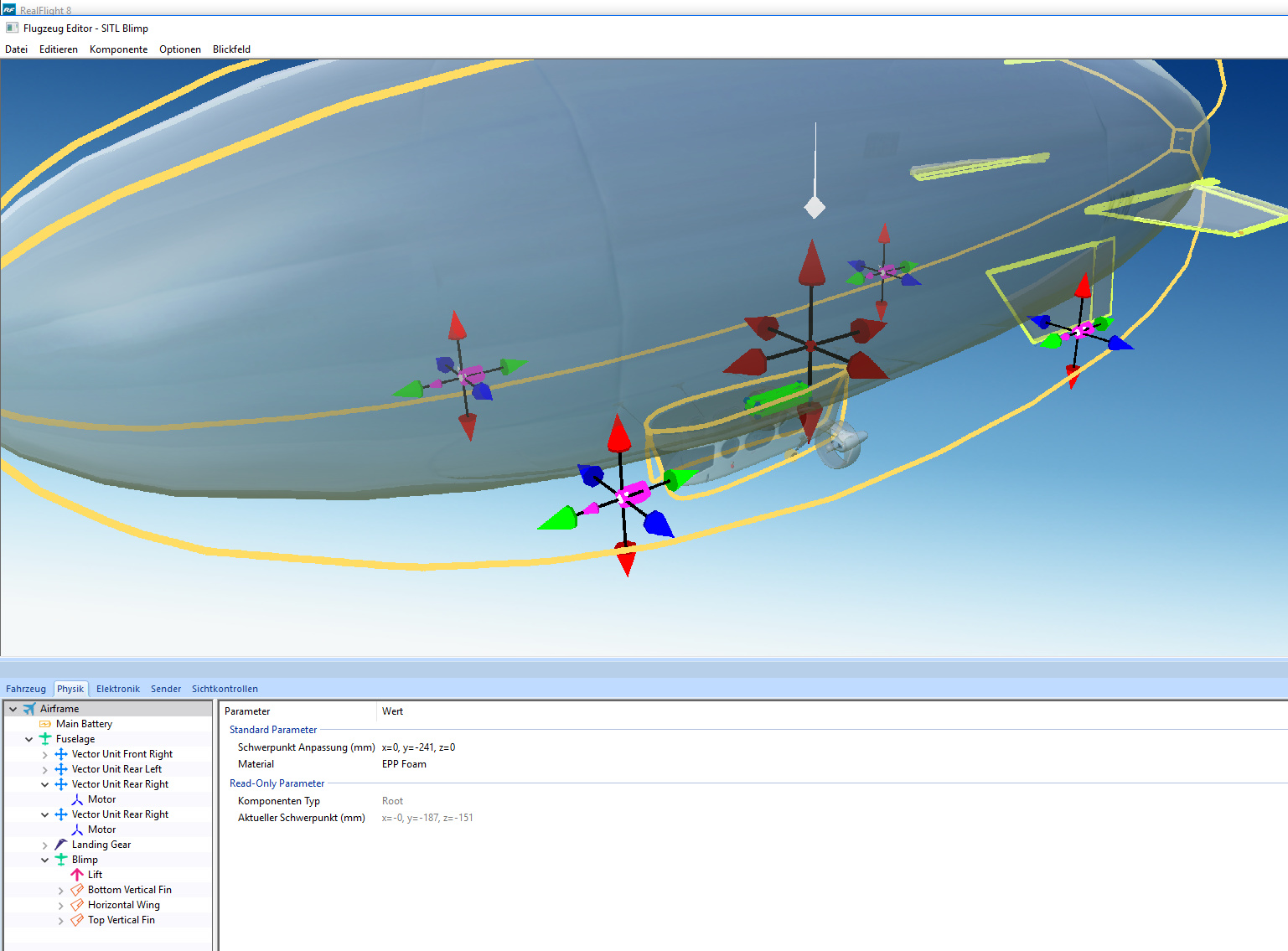
We plan to make a pig leg configuration with four vector units tangential to the hull and located at 45deg. One vector unit = 180deg servo with reversible motor (BLHeli ESC)
This is the SITL model I made for testing (will share it when its finished. RF8 is crashing all the time when I try to edit it…)
Goal is to have position hold feature and the blimp can also move sidewards and up and down without changing pitch or heading.
We need some Code to make this work.
I am thinking about using the Quadplane code for this, but I don’t know if this will work. Any idea on this?
@Gary_Mortimer Have you tuned any parameters on that you shared? I see that you still have TECS Spdweight at 1. Wouldn’t if make sense to set this to 0, so the TECS controller ignores potential energy?
That’s for you to change, I just slung that together with no thought I don’t know anything about RealFlight I am afraid, if X-Plane is good enough for NASA. Any wind is going to be an issue trying to move an airship sideways.
Hi …
Any progress on this topic?
Does anyone know about the airship MAVtype in PX4? any one tested it? @Gary_Mortimer,@palm369 can you please share more detail about your great job? what MAV type did you use? and how many motors?
Thanks
Depending on your airship configuration, you should be able to use Plane with appropriate parameters (ie differential thrust for yaw, roll gain to 0, etc).
I am working in a airship that has a tilt-rotor (with one servo and two engines) and a tail rotor. Could you give more information about how to config a Arduplane for this case?
I tryed to search a solution with VTOL, but it was very difficult because it is based in QuadPlane.
 I don’t know anything about RealFlight I am afraid, if X-Plane is good enough for NASA. Any wind is going to be an issue trying to move an airship sideways.
I don’t know anything about RealFlight I am afraid, if X-Plane is good enough for NASA. Any wind is going to be an issue trying to move an airship sideways.