Hi
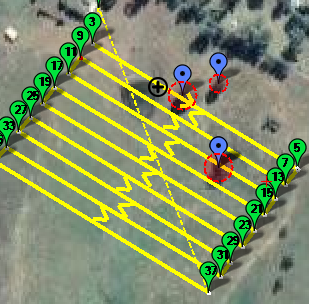
I want to add obstacles like dji mission. I used the Mission Planner and qground control but they do not change the path of the mission, I want to add the obstacle first and then change the path by specifying the mission (Like the image below). I can not use avoidance because it causes a delay in the mission.
Please introduce if you know of other software or a way
Thanks
I can set exclusion or inclusion zones (fence) but I cant combine them with a waypoint grid, and an auto generated grid wont go around a exclusion zone.
I’m sure the exclusion zone will still be in force, but you have to manually adjust you mission around it.
I’ll test more in case I’m wrong.
Dijkstra’s will fly you round the edge fence to carry on the mission. Of course this is not as good as if the mission had been planned with the fences in the first place so as to minimize the extra distance.
My problem is that the drone moves straight to the next waypoint and does not return to the lines. In the Oa parameters, the OA_OPTIONS specifies whether to return to the main path or the next waypoint but in my 4.1 dev firmware this parameter doesn’t exist. I want to use it for agriculture and I need the moves to be on the lines.
On the other hand, I can correct the path by placing new waypoints between missions, but by activating the OA parameters, it stops at each waypoint which is problematic for me.
Hi @hassani
I am not sure I understand your last comment.
In any case, we added OA_OPTIONS a few months back but only for Rover, not for copter. Thats why it isn’t visible to you
Thanks @rishabsingh3003
When the drone sees the obstacle, I want to it return to the main path, it returns to the path but goes straight to the next waypoint, ie it does not move on the lines after seeing the obstacle.
Hi @rishabsingh3003,
Do you know why do we have this parameter in the Copter 4.1.0 dev full parameter list? And also it is not in the SITL parameters. As much as I know SITL is the latest developed code, but I couldn’t find it there after cloning the latest code.
Thanks.
Unfortunetly, the Parameter is being shown in Copter’s parameter list. Its a small mistake on my end… I’ll be fixing it soon.
In short, the parameter is only usable for Rover, and in Copter its not defined.
Thanks, Rishabh.
I need this function in Copter. Can I develop it somehow to use it in Copter? Or any other idea?
I create a topic in the Development. I will be thankful if you help me with that
Thankful.