Hi everyone
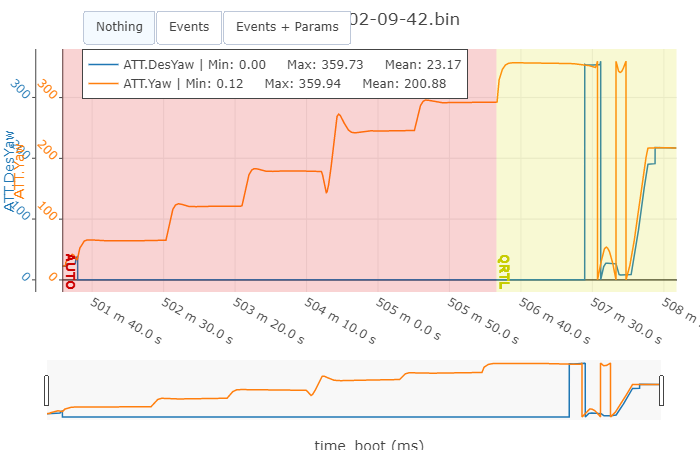
I have this graph of actual yaw vs desired and I am not sure whats causing the trouble and I am trying to tune it as described:
https://ardupilot.org/plane/docs/roll-pitch-controller-tuning.html
any suggestions looking at the graph??
Hi everyone
I have this graph of actual yaw vs desired and I am not sure whats causing the trouble and I am trying to tune it as described:
https://ardupilot.org/plane/docs/roll-pitch-controller-tuning.html
any suggestions looking at the graph??
There is no concept of desired yaw in forward flight, hence it is always zero.
Hi Peter thank you so much for the information