I understand that. But as I said: you want the motor to be reversed either by ESC calibration or switching 2 wires. Not just simply by setting it in the parameters
you can change things in parameters rather than have everything physically going the right way, but it causes everything to get much more complicated, things like the ESCS centre points not lining up since one is driving backwards and one is driving forwards when the boat is going forwards. it also makes your logs very hard to look at since nothing is going the same way.
So swap the cables at the engine so that the PWM posts would follow in one direction while flowing forward and the motors would physically spin outwards. Yes?
yes correct, your centre points should line up when you change it.
My midpoints in the manual are equal. Goes crazy when acro is turned on. But when I took off thr_min _value it stopped. These were the two problems that caused me to start this thread. Jumping PWM points after switching to acro mode and not stopping the motors after returning the stick to the neutral position when I moved it right left.
And which midpoints are you writing about here? That I have to trim the motors in the servo outputs tab to start evenly? Is it about jumping when switching to acro mode and not returning to the original values after releasing the gas.
by rewiring them it will remove the trim adjustments.
So I will have to do the engine test again and set the trim value so that they start evenly? What do you mean?
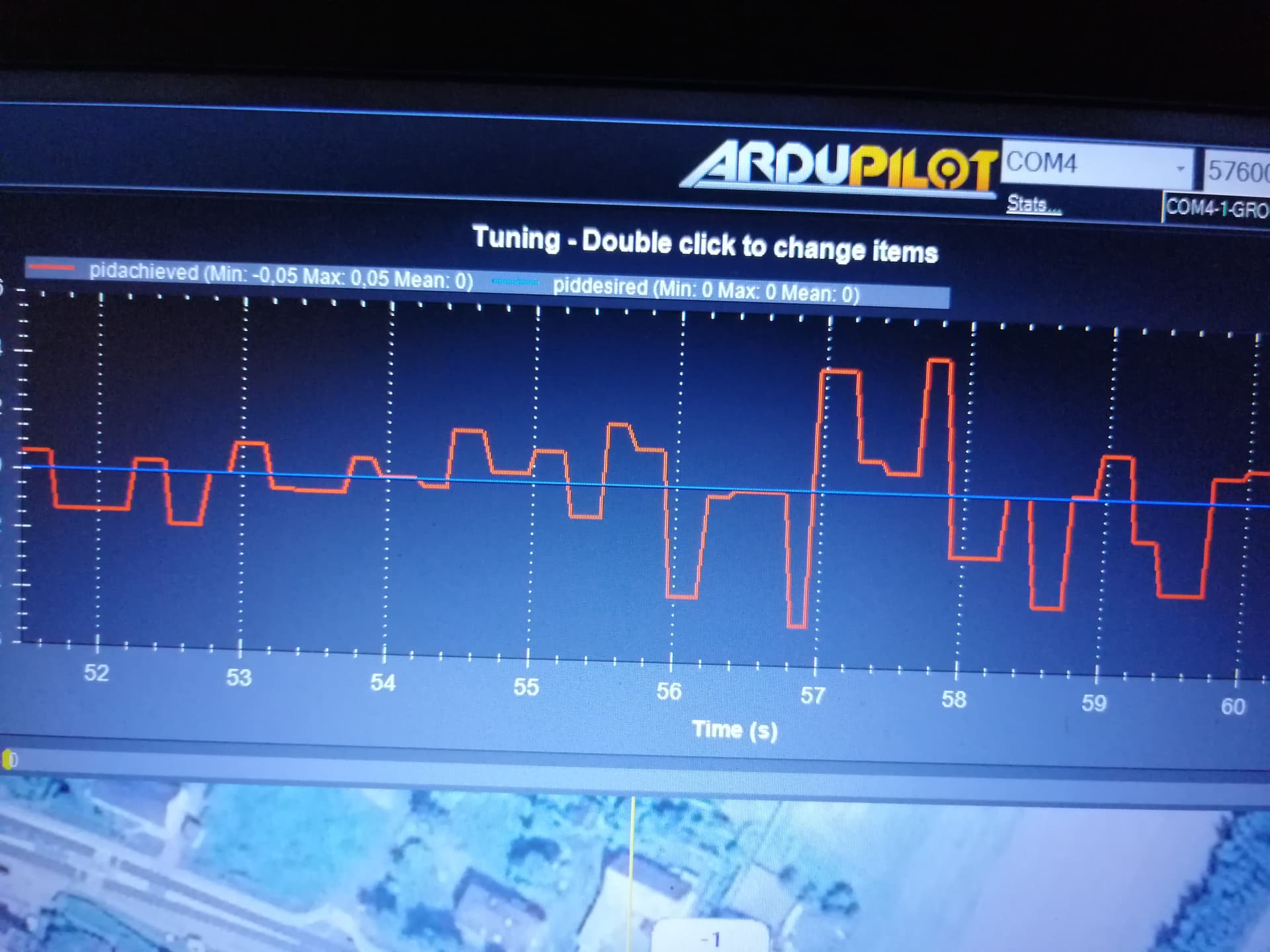
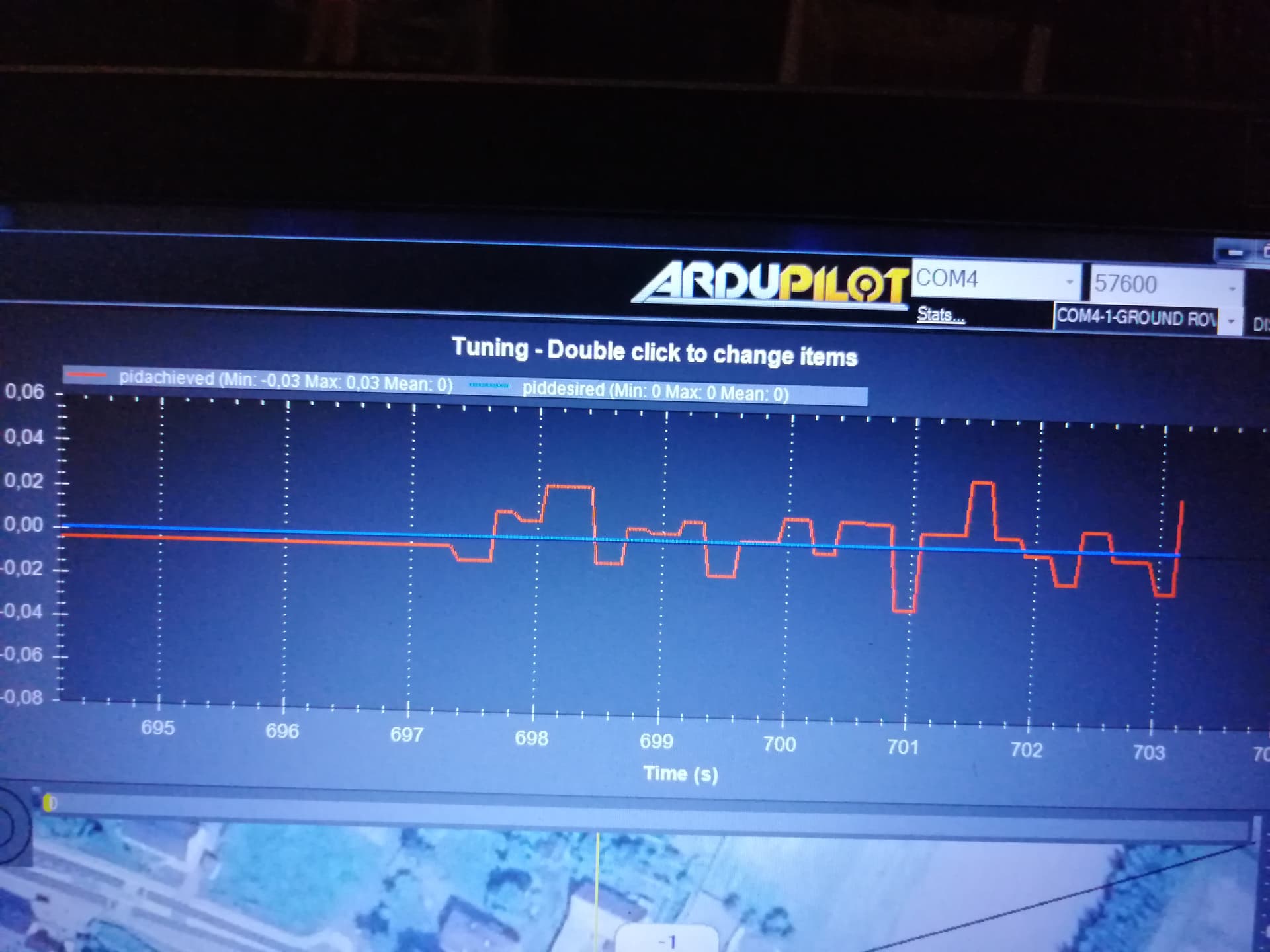
Please take a look at this. Gcs_pid_mask - steering Vehicle in acro mode, sticks in “0” position after changing mot_thr_min to 15 engines after starting acro do not work automatically, but in the pidachived tuning tab it looks like this:

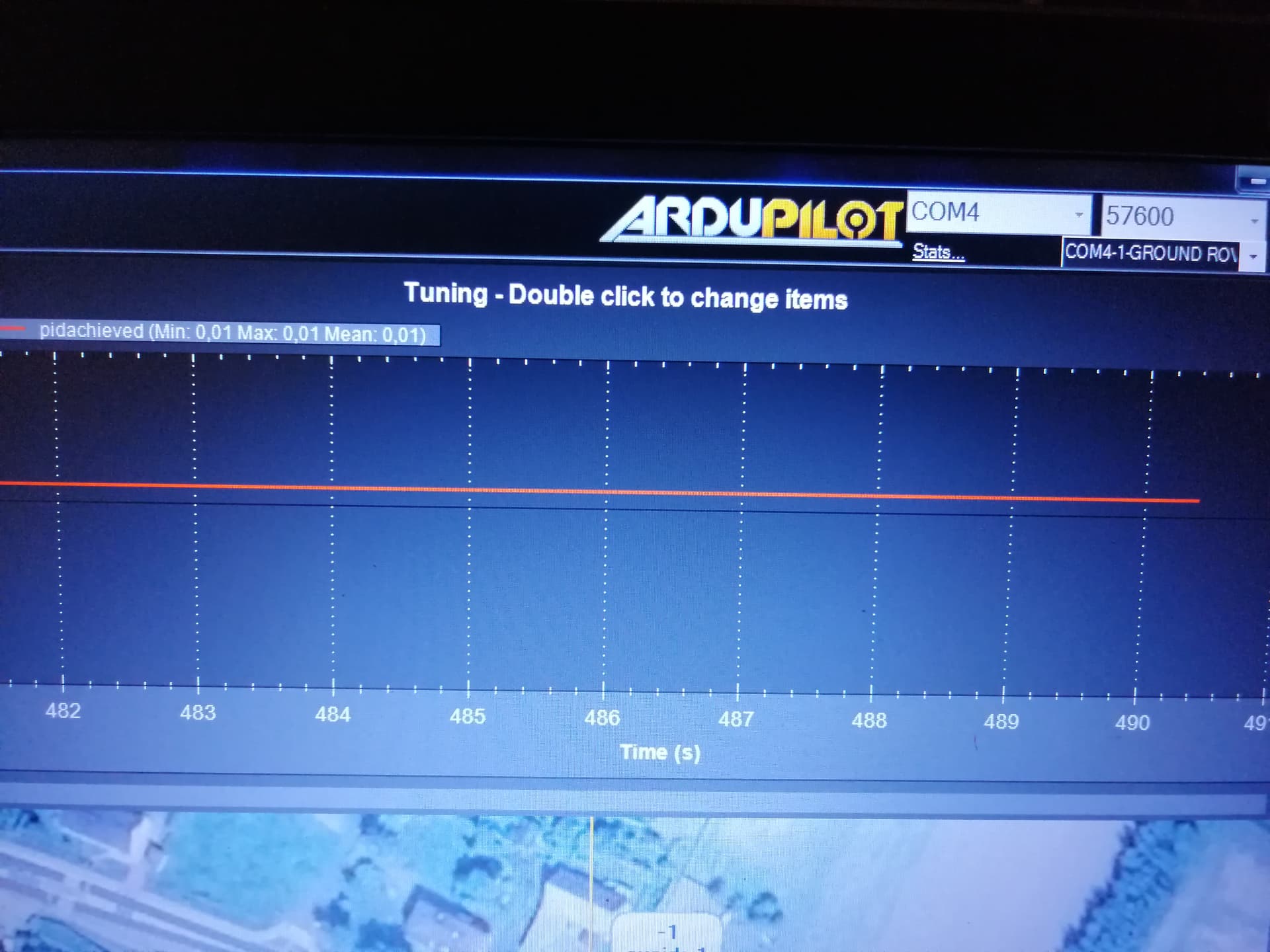
For comparison, this is what Gcs_pid_mask looks like on the throttle channel
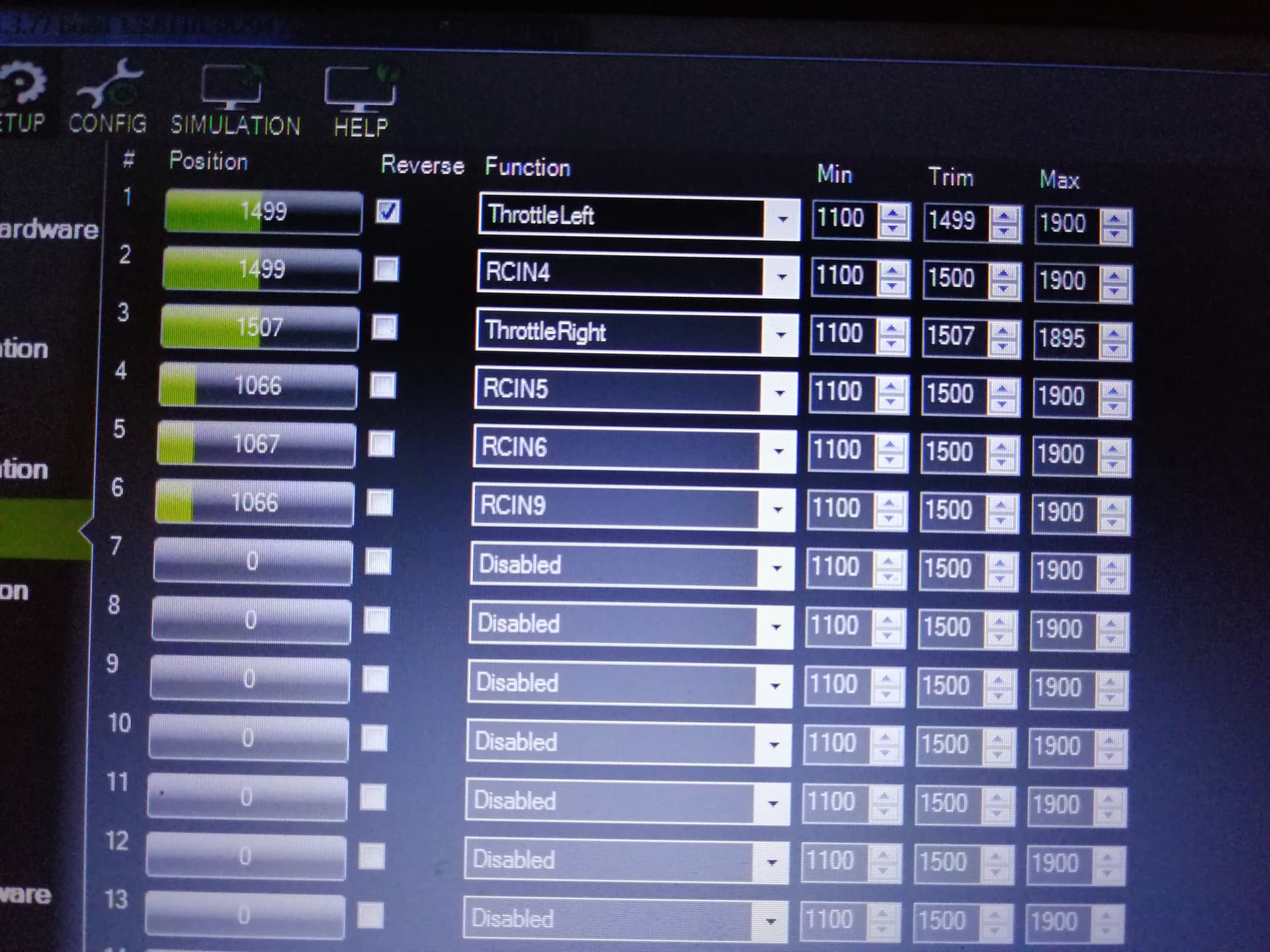
And this is what pwm values look like when manual is on
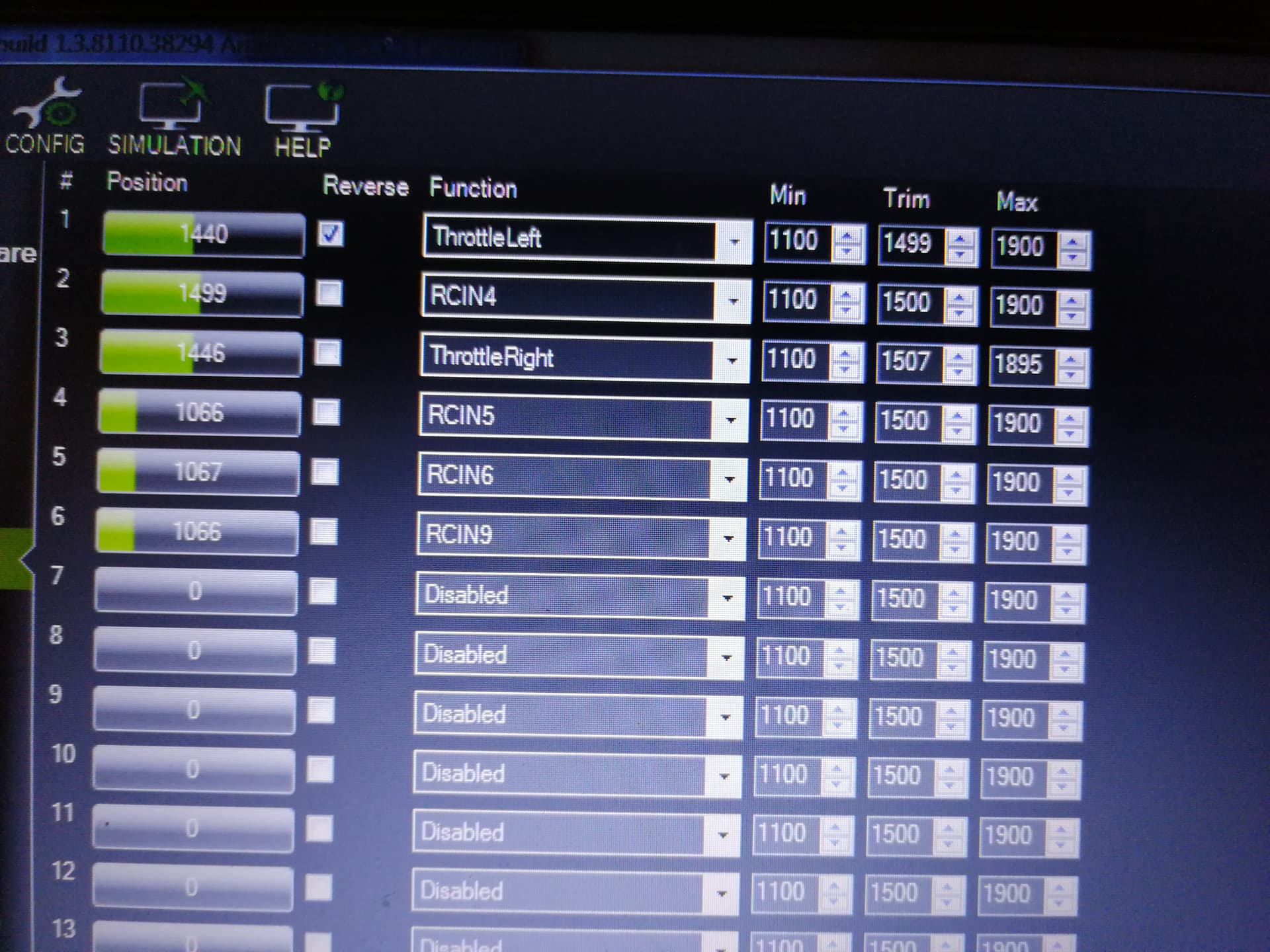
And this is what the PWM values look like (without moving the radio stick) straight after switching to acro mode. The values jump from low (from 1 picture) to high (from 2nd picture). Motors stand still if I don’t move the stick.

Turning off the reverse does not do the trick.
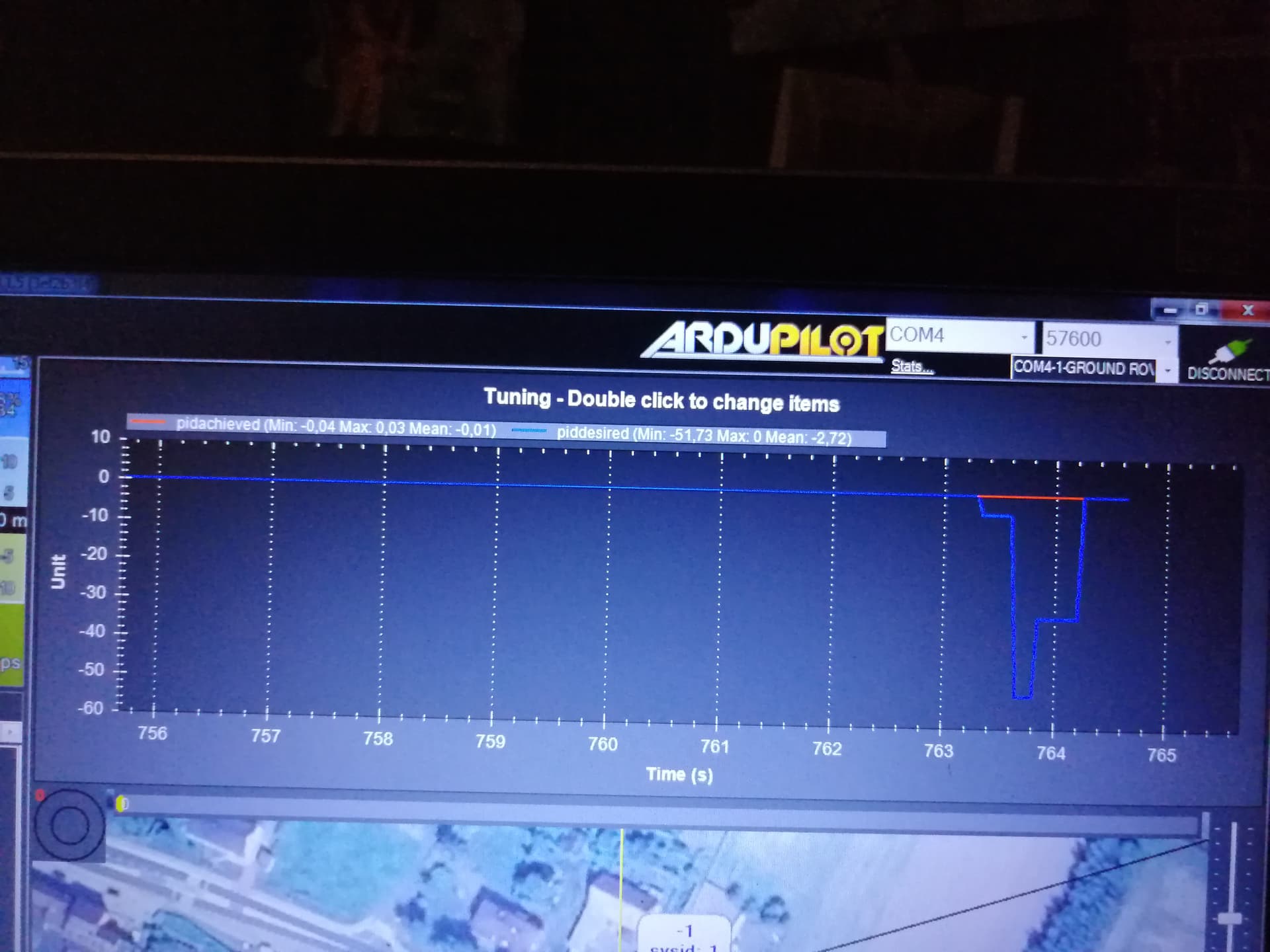
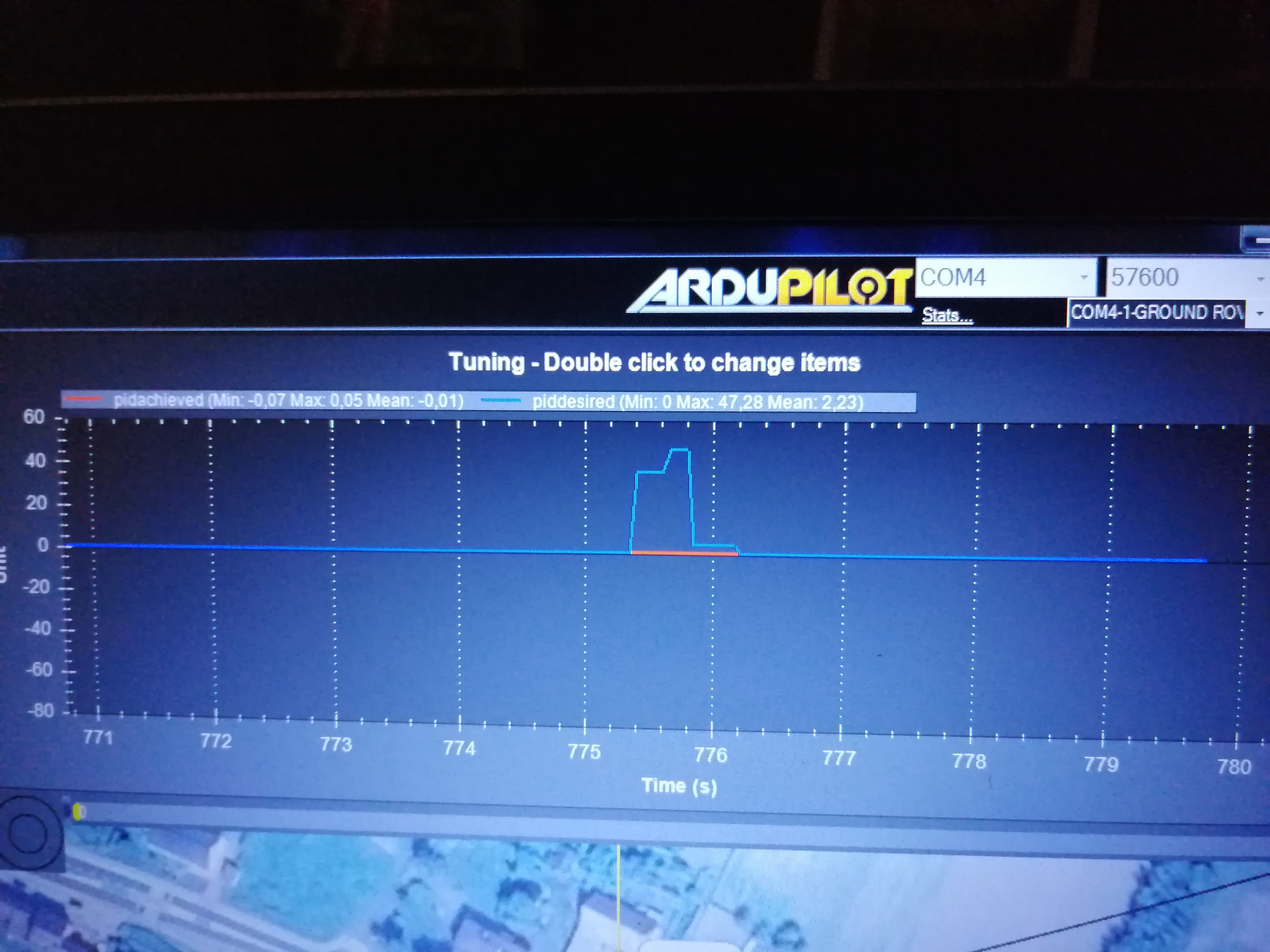
When I switch straight to acro mode from manual (gcs pid mask steering). It looks like:
And as soon as I move the stick to the right or left it goes like this:
You do know you can run it as a boat and just set MIS_DONE_BEHAVE to 0:Hold 1:Loiter 2:Acro 3:Manual to change Behaviour after mission completes. its just the default behaviour is loiter.
Yes, I know, I just have it set as Rover so that it does not go into the loiter. Because mis done behavior does not change my modes after completing the mission. Still stays on the car. However, this is still not a solution for my screenshots. Because right after turning on the acro pixhawk it gives a signal to the motors even though the sticks are standing still. How to solve it?
If I received such an image in the tuning tab with loiter mode, I understand that the pixhawk tries to stay on the Gps point and therefore sends a signal to the engines without moving the stick to stay on it. But why is this happening in loiter mode? And that’s from the very moment you switch to it after swimming in manual mode. (and not completing the mission)
Can anyone help me figure out why in the acro mode, when I have Gcs_pid_mask - steering turned on, a delicate pixhawk operation appears despite the lack of movement of the radio stick?