There is up to ten file? I had it on my phone. Folder Mission Planner> Files> Logs> Rover.
There were two files in
. Rlog that could not be set up on the forum
And. Tlog I uploaded.
when the revers is turned off and in the radio calibration and servo output tab and I put the stick forward, both motors turn backwards. when pushing the joystick back, the motors spin forward. however, in the radio calibration tab, when I put the stick up, the green bar goes down and the PWN values decrease, which is opposite to the radio (all reverse is turned off) when the stick gives the stick to the left, the engines turn outwards (flowing forward) and when it gives right they turn going inward (going backward) It looks like the gas was on the first channel and the direction control was on the third channel. In my radio link at10 I have stk mode set so that the third channel works up and down and the first channel works left and right. maybe I am mistaking the directions of the motors, I always looked at the way that, from the back of the boat, the left-hand motor was left and the right-handed one
no, post a data flash log from the flight controller.
You need access
Request access, or switch to an account with access.
Now is good. Please check
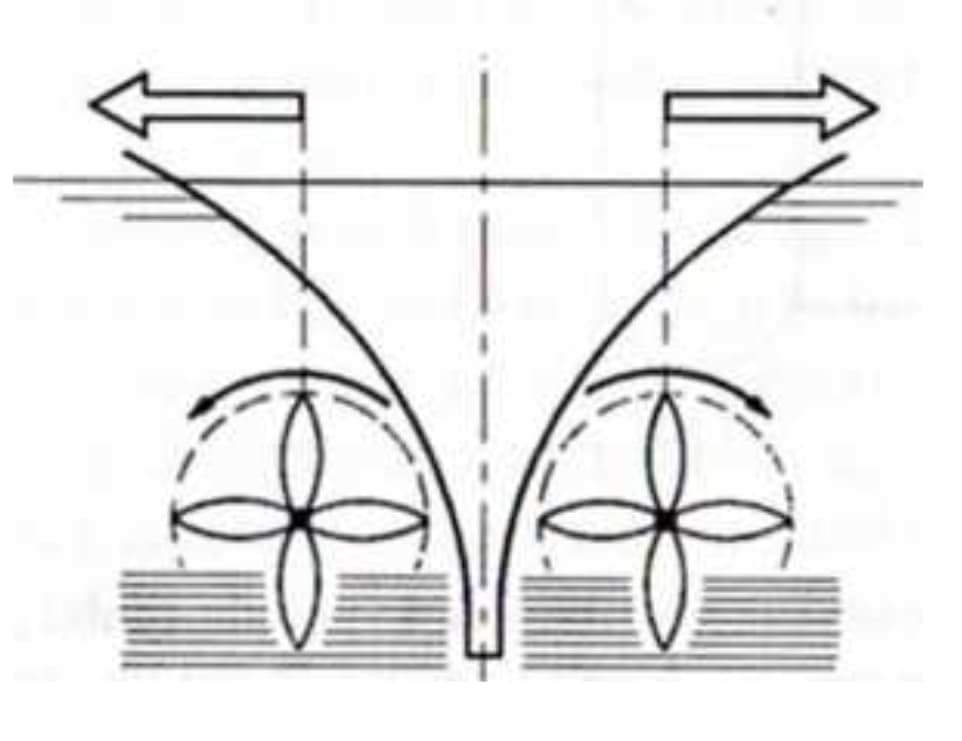
Please tell me, do you have sedate reverses on the motor channels in mp? By this I am asking that Rover is software for cars. And in order for the car to move forward, the engines must turn to the right, i.e. forward. In order for the boat to move forward, the engines have to spin outwards, i.e. left to the left (backward) and the right to the right (forward). The direction is similar to the car.To turn right, the left engine runs forward and the right one backwards to turn back in place like a tank (engines work like in a boat while going forward) the boat again to turn right lets both engines turn left. So left engine pushes right pulls. Without turning on the reverse, I am not able to achieve such control. Unless I had to change the wires from the regulators at the engine.
that was just a log of it doing nothing in hold mode.
have you checked in motor direction that everything is going the right way?
https://ardupilot.org/rover/docs/rover-motor-and-servo-configuration.html#testing-motor-direction
setup your minimum throttle according to this
https://ardupilot.org/rover/docs/rover-motor-and-servo-configuration.html#minimum-throttle
if your Throttle is reversed on the input, then reverse it on your transmitter.
I was doing a motor test. When I do not have the reverse on channel 1 turned on in the servo outputs tab, the motors spin forward, which in my case is to the right. I set the throttle to a minimum. For me it is 20%. Only at 20% do the engines start to spin. I have trimmed middle values on the motors. Left engine 1499 right engine 1508 to take off evenly. Without these trims, the left engine started at 20% throttle and the right engine at 22%
So do a throttle reverse throttle on your radiolink at10 and not in the mp program and the radio calibration tab

I do anyway. Mot thr min is 20. And then when it is 0 the engines do not work and if I give 1 they rotate.
Only when I have the mot thr mini set, when I give the stick left or right and let it go to the neutral position, the motors do not stop turning. However, when I give mot thr min again to 0 and I add pid from the steering tab, the motors stop when the stick returns to the neutral position
When I changed the RC map or roll. I gave on 3 and throttle on 1, the same thing happened only up and down. When I gave the stick up or down and it returned to the neutral position, the engines did not stop turning. So there is clearly something wrong with the roll channel. Then, when I changed the RC map, I did not have to have a reverse in the servo outputs tab, because when I put the stick forward, the boat was moving forward and the engines rotated right to the right, i.e. forward and the left to the left, i.e. backwards
https://drive.google.com/file/d/1k8XNCpWKerV3_D1e1Jo42hQuzhzNAHol/view?usp=drivesdk
I include the swimming bin file. Thank you very much for helping me find my problem
change your MOT_THR_MIN down a little to 18 or 15, its possible your motor controller just doesn’t have that 1% resolution in its control.
I’ll change it tomorrow. And I will let you know. How about the other parameters?
if your in acro mode and start moving the throttle and steering without it being in the water, then it wont stop the motors until its able to achieve its commanded manoeuvre, I think that combined with the motor controllers lacking 1% motor control resolution is causing them to not being able to stop turning.
1 Like
I just noticed that you reversed one motor inside the parameters in order for it to turn in reverse.
While it’s absolutely correct that you’d want the motors to spin in different directions, the correct way to do this is to hard code this into your motors/hardware. Instead of the ardupilot software.
If you’re using burshless motors with 3 wires you could simply switch any 2 wires. That will make the motor turn the other direction.
Another way is to calibrate your ESC (which you should do anyway!) And tell the ESC to turn in reverse.
Have you noticed any other motor control errors in my log? Or wrong turn rat, g or pid max turn?
You’ve noticed well. I have a reverse on channel 1 because my propellers are left and right. And in order for my boat to go forward, the left screw must turn left and the right screw must turn right. With my propellers to make the boat turn left, the engines turn right, i.e. forward and vice versa. And this gets the reverse of channel 1go.
In order for me to swim without any reverses, I would have to have both right propellers. Then the boat, turning forwards, goes forward and turning backwards, it goes backwards. However, this solution is bad for me. Because if I have two right screws, the boat will turn right practically in place, but it will make a circle to the left. I have brush motors. I have Esc for brush motors, there are two wires to the motor from it. My Esc has LEDs that signal the direction of rotation of the motor. If the LEDs on Esc are green, the engines are turning well according to them, i.e. forward and so I have. As a result, I have only 2 options. Either revers or change of srubs