Hello, I tried doing this in copter, rover and plane, and it worked in none of these firmwares.
I can configure channels 1 to 8, the main channels on the pixhawk, e.g. rc pass through, throttle, aileron, and so on.
I would like to do rc pass through on the auxiliary channels. Corresponding to channels 9 to 14 on thhe Taranis SBUS.
The Taranis is set up properly. The radio calibration shows all 16 channels receive input signals.
I followed this manual to attempt to map output channels: https://ardupilot.org/copter/docs/common-rcoutput-mapping.html
I also tried to follow this video, but as explained below, the option 1 for rc pass through is not available in my mission planner (latest version) in any of the firmwares, rover, airplane or copter.
And this thread: Aux channels above 8 how to get and use them
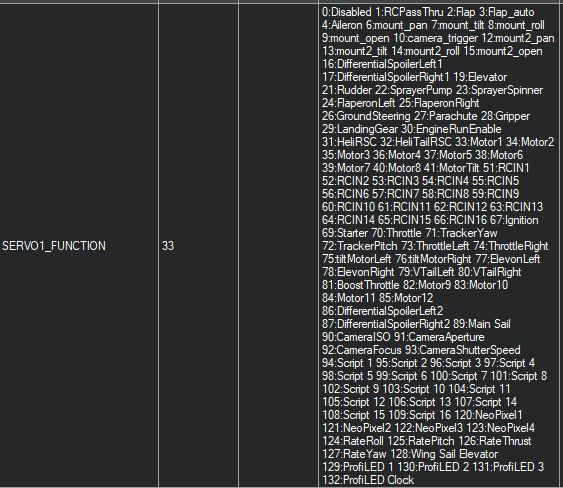
I went into full parameter list and full parameter tree and found the rc9, rc10, rc11, etc channels.
Problem 1) The function for rc pass through should be 1, but 1 is not mentioned in the available options, it goes from 0 = do nothing to 4 = RTL. I set it to 1 anyway, but nothing happens, channel 9 (Aux 1) is dead.
Problem 2) I went ahead and set it to 19 = Gripper, assuming that this should lead to some kind of servo actuation. But nothing. A servo is connected, the controller is armed (force armed via Mission planner), but nothing happens. Servos on channels 1 to 8 work fine. Nothing on the auxilliary channels, although there is power to them via an ESC/BEC on the servo rail.
Setting up and using auxilliary channels should be a common requirement for many applications. The flight controller has 16 channels, so it should be possible to use them? May I ask if anybody has had this problem and managed to solve it?
Thank you.
Lisa